
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法.pdf

猫巷****婉慧

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法.pdf
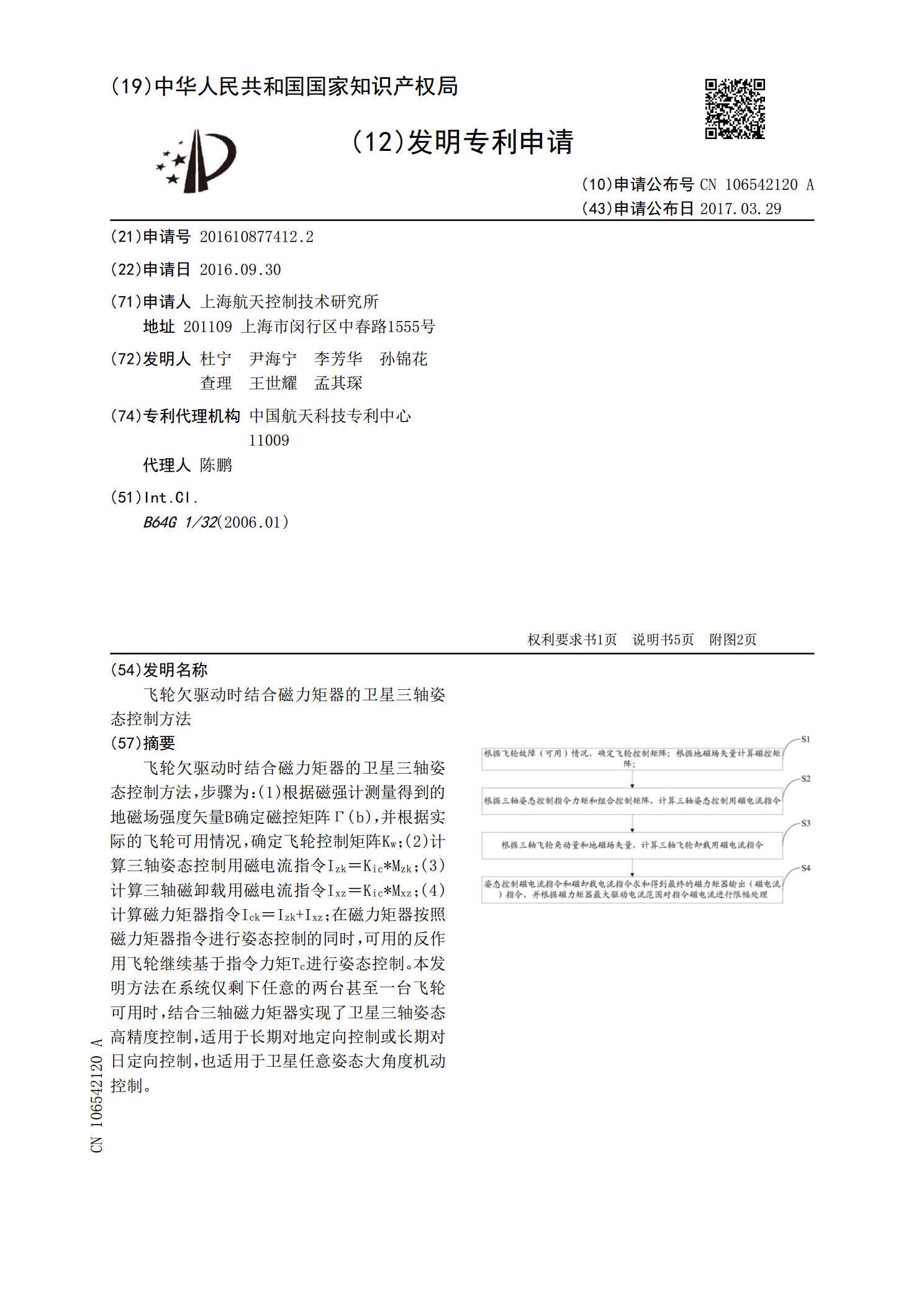
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法,步骤为:(1)根据磁强计测量得到的地磁场强度矢量B确定磁控矩阵Γ(b),并根据实际的飞轮可用情况,确定飞轮控制矩阵K

基于磁力矩器和飞轮的卫星姿态全方位控制方法.pdf
基于磁力矩器和飞轮的卫星姿态全方位控制方法,涉及一种利用磁力矩器和飞轮完成卫星入轨阶段全方位姿态控制方法。解决了现有的卫星姿态全方位控制技术可靠性低、寿命短的问题,具体过程如下:一、根据控制系统要求,设定控制器参数;二、测量地磁场强度向量Bb、卫星角速度向量Wb和太阳方位角,并将测量数据发送至卫星控制器;三、计算期望控制力矩向量Tm和控制磁矩向量Mm,并将控制磁矩向量Mm发送至磁力矩器;四、获得有效太阳方位角向量Alfa;五、计算控制输入力矩向量Tw,并发送至飞轮;六、磁力矩器根据控制磁矩向量Mm,飞轮根
一种欠驱动航天器三轴姿态稳定控制方法.pdf
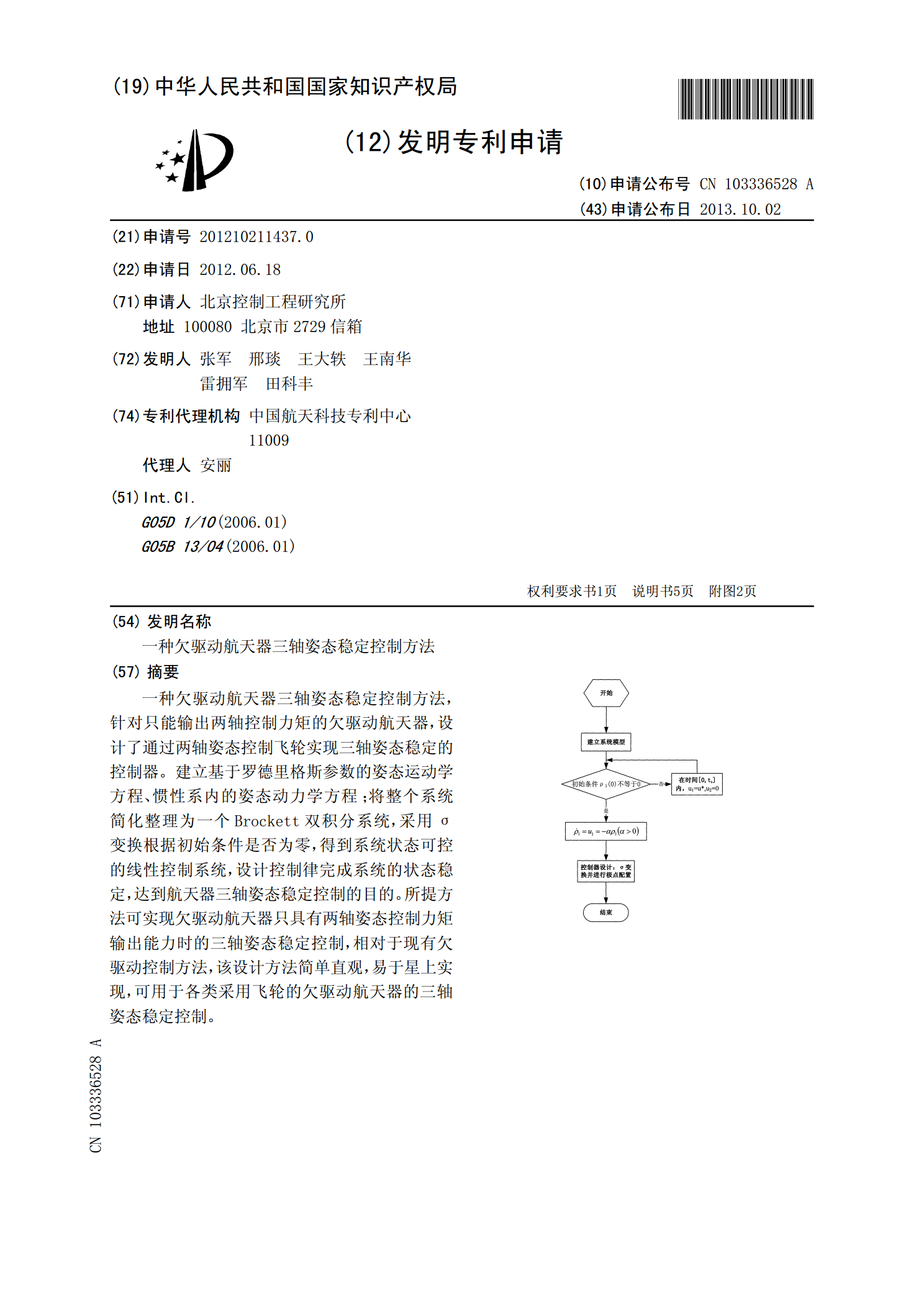
一种欠驱动航天器三轴姿态稳定控制方法,针对只能输出两轴控制力矩的欠驱动航天器,设计了通过两轴姿态控制飞轮实现三轴姿态稳定的控制器。建立基于罗德里格斯参数的姿态运动学方程、惯性系内的姿态动力学方程;将整个系统简化整理为一个Brockett双积分系统,采用σ变换根据初始条件是否为零,得到系统状态可控的线性控制系统,设计控制律完成系统的状态稳定,达到航天器三轴姿态稳定控制的目的。所提方法可实现欠驱动航天器只具有两轴姿态控制力矩输出能力时的三轴姿态稳定控制,相对于现有欠驱动控制方法,该设计方法简单直观,易于星上实
一种应用飞轮群的欠驱动航天器姿态控制方法.pdf
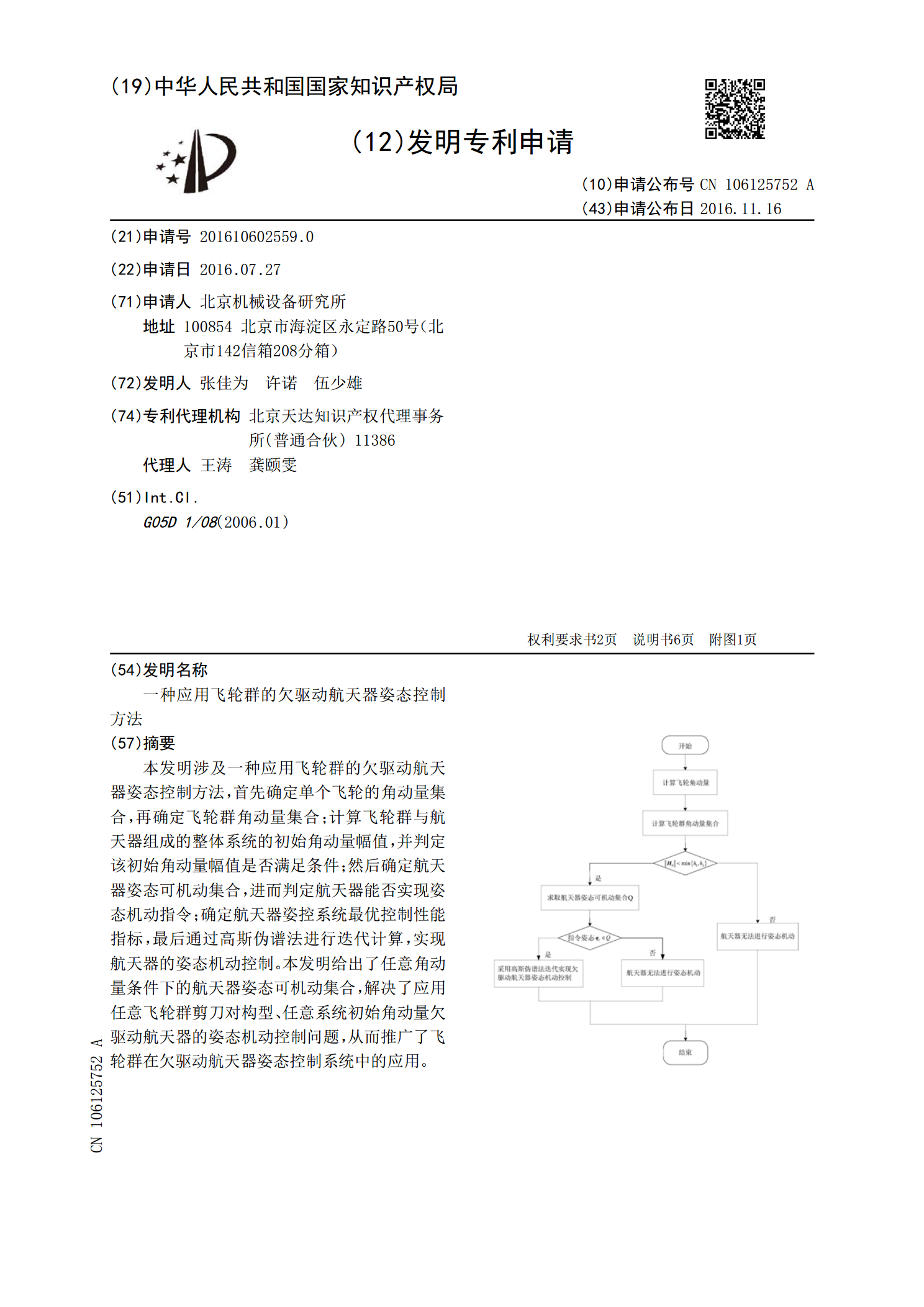
本发明涉及一种应用飞轮群的欠驱动航天器姿态控制方法,首先确定单个飞轮的角动量集合,再确定飞轮群角动量集合;计算飞轮群与航天器组成的整体系统的初始角动量幅值,并判定该初始角动量幅值是否满足条件;然后确定航天器姿态可机动集合,进而判定航天器能否实现姿态机动指令;确定航天器姿控系统最优控制性能指标,最后通过高斯伪谱法进行迭代计算,实现航天器的姿态机动控制。本发明给出了任意角动量条件下的航天器姿态可机动集合,解决了应用任意飞轮群剪刀对构型、任意系统初始角动量欠驱动航天器的姿态机动控制问题,从而推广了飞轮群在欠驱动

基于反作用飞轮和磁力矩器的小卫星姿态联合控制算法.docx
基于反作用飞轮和磁力矩器的小卫星姿态联合控制算法基于反作用飞轮和磁力矩器的小卫星姿态联合控制算法随着航天技术的不断发展,人类已经可以通过各种各样的卫星实现遥感、通讯、导航等多种应用。而卫星姿态控制技术是卫星系统中至关重要的一环,它直接关系到卫星的工作效能和寿命。因此,提高卫星姿态控制技术的精度和可靠性是卫星技术的重要研究方向之一。目前,卫星姿态控制技术主要采用反作用飞轮和磁力矩器两种器件进行控制。反作用飞轮利用角动量守恒原理,在旋转方向中提供反向的角动量来控制卫星的姿态。而磁力矩器通过控制卫星磁矩的大小和