
一种基于动量轮控制的全姿态捕获方法.pdf

爱欢****23

1/9

2/9
3/9
4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于动量轮控制的全姿态捕获方法.pdf
本发明涉及一种基于动量轮控制的全姿态捕获方法,包括如下步骤:(1)速率阻尼;(2)恒星捕获;(3)姿态更新和星本体地磁强度计算;(4)太阳搜索和太阳定向姿态确定;(5)目标捕获姿态确定;(6)轮控调姿和磁力矩器卸载。本发明针对航天器全姿态捕获问题,提出一种工程可操作性强的、基于动量轮控制的全姿态捕获方法。

基于动量轮的卫星姿态控制算法研究.docx
基于动量轮的卫星姿态控制算法研究基于动量轮的卫星姿态控制算法研究摘要:卫星姿态控制是保障卫星安全稳定运行的重要技术之一,而动量轮是航天器最常用的姿态控制器之一。本文介绍了动量轮的基本原理和传统的姿态控制算法,并分析了其中存在的问题。随后,本文介绍了几种常见的基于动量轮的姿态控制算法,包括完整的PID控制算法、自适应控制算法和模糊控制算法等,并对它们的优缺点进行了分析比较。最后,本文介绍了一些最新的进展和趋势,展望了未来动量轮在卫星姿态控制中的应用前景。一、引言卫星姿态控制是指在航天器运行时,通过向航天器姿

基于动量轮的卫星姿态控制算法研究的综述报告.docx
基于动量轮的卫星姿态控制算法研究的综述报告卫星的姿态控制是卫星运行中非常重要的一个子系统,通过控制卫星的姿态,可以使卫星保持稳定的状态,确保卫星的正常运行和各项任务的顺利完成。其中,动量轮是一种常用于卫星姿态控制的设备,其通过运动动量守恒原理影响卫星的姿态变化,其控制精度较高,因此得到广泛应用。本文将对基于动量轮的卫星姿态控制算法进行综述。1.动量轮的工作原理动量轮是一种主动元件,它通过改变旋转速度来影响卫星的姿态变化。具体来说,动量轮中的电机把卫星的角动量换成其自身的旋转动量,然后通过动量守恒原理,卫星

一种航天器的初始姿态捕获控制方法及系统.pdf
本发明提供一种航天器的初始姿态捕获控制方法及系统,所述航天器的初始姿态捕获控制方法包括:利用三轴磁力矩器根据地磁在星体的变化率对所述航天器施加控制磁矩,实现速率阻尼阶段控制;利用反作用轮组起旋,根据所述航天器的姿态信息对所述航天器施加三轴轮控,同时卸载所述三轴磁力矩器对所述航天器施加的控制磁矩,实现太阳捕获阶段控制。本发明不仅在姿态控制部件上只采用了反作用轮和磁力矩器,考虑了星箭分离偏差过大的应对措施,首先施加了速率阻尼,以反作用轮不致于饱和为前提条件,同时在太阳捕获阶段,仅依靠磁强计信息和太阳敏感器信息
一种磁力线圈结合动量轮的航天器姿态联合控制方法.pdf
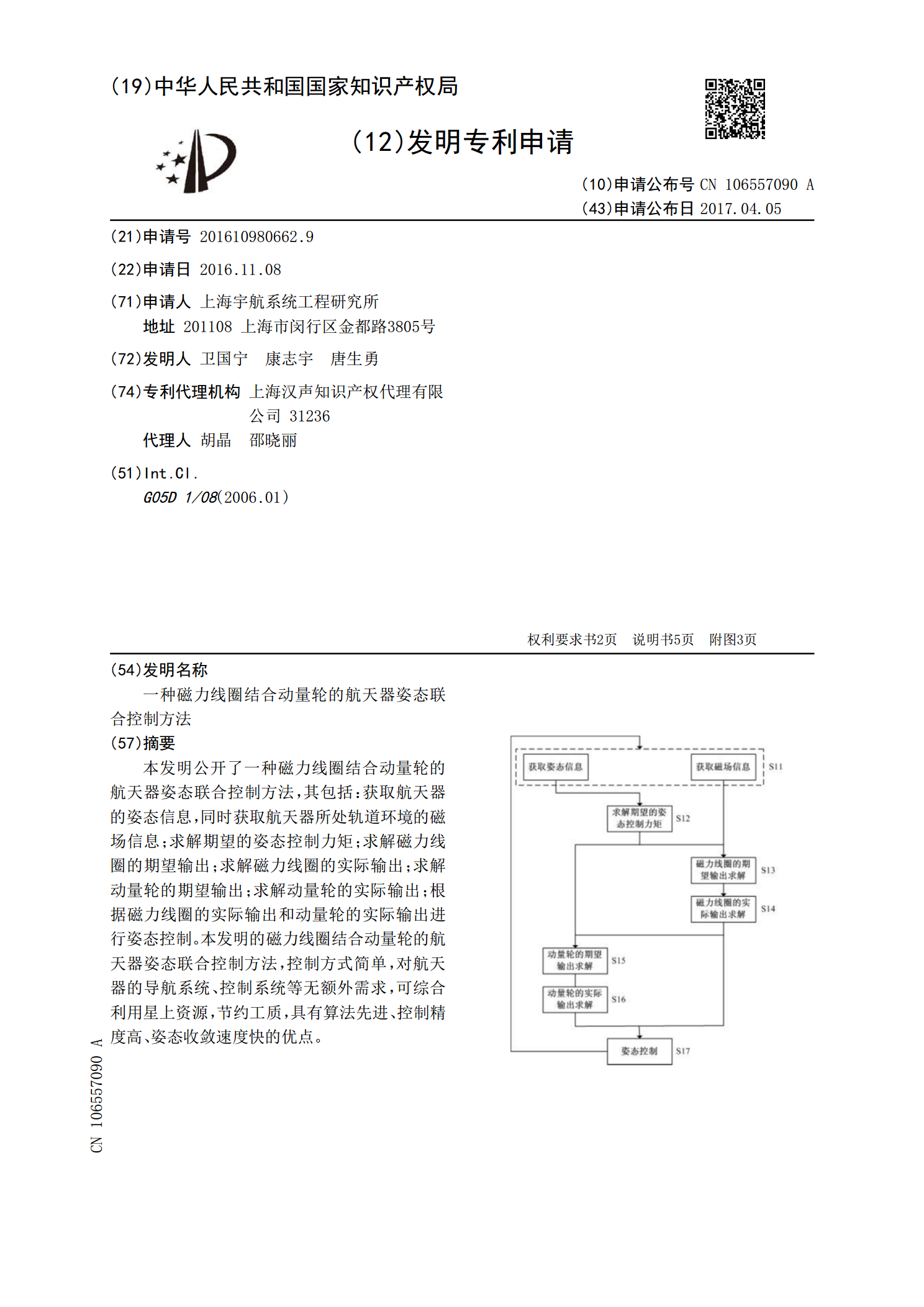
本发明公开了一种磁力线圈结合动量轮的航天器姿态联合控制方法,其包括:获取航天器的姿态信息,同时获取航天器所处轨道环境的磁场信息;求解期望的姿态控制力矩;求解磁力线圈的期望输出;求解磁力线圈的实际输出;求解动量轮的期望输出;求解动量轮的实际输出;根据磁力线圈的实际输出和动量轮的实际输出进行姿态控制。本发明的磁力线圈结合动量轮的航天器姿态联合控制方法,控制方式简单,对航天器的导航系统、控制系统等无额外需求,可综合利用星上资源,节约工质,具有算法先进、控制精度高、姿态收敛速度快的优点。