
一种全向运动的汽车搬运机器人及其控制方法.pdf

白真****ng


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全向运动的汽车搬运机器人及其控制方法.pdf
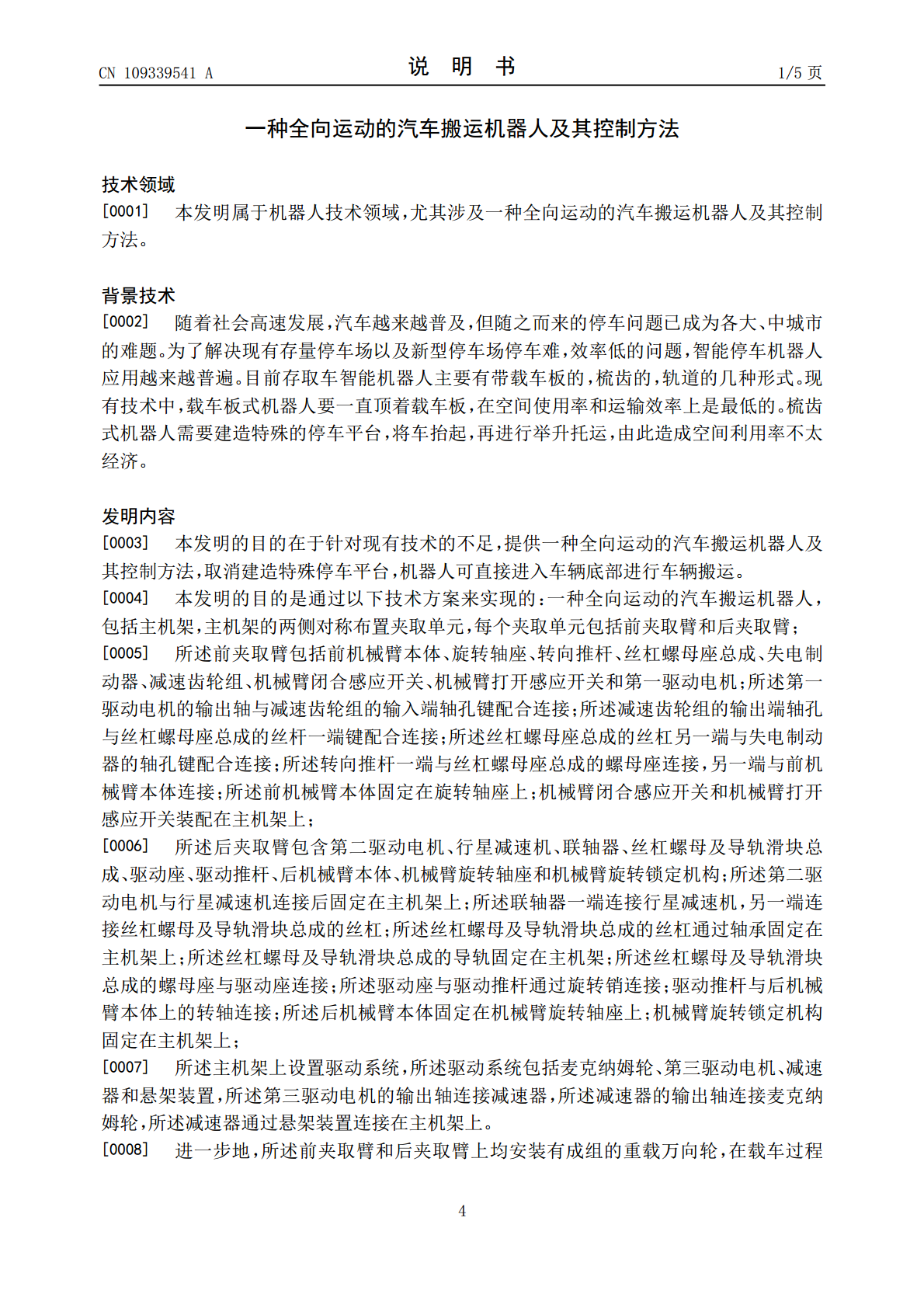
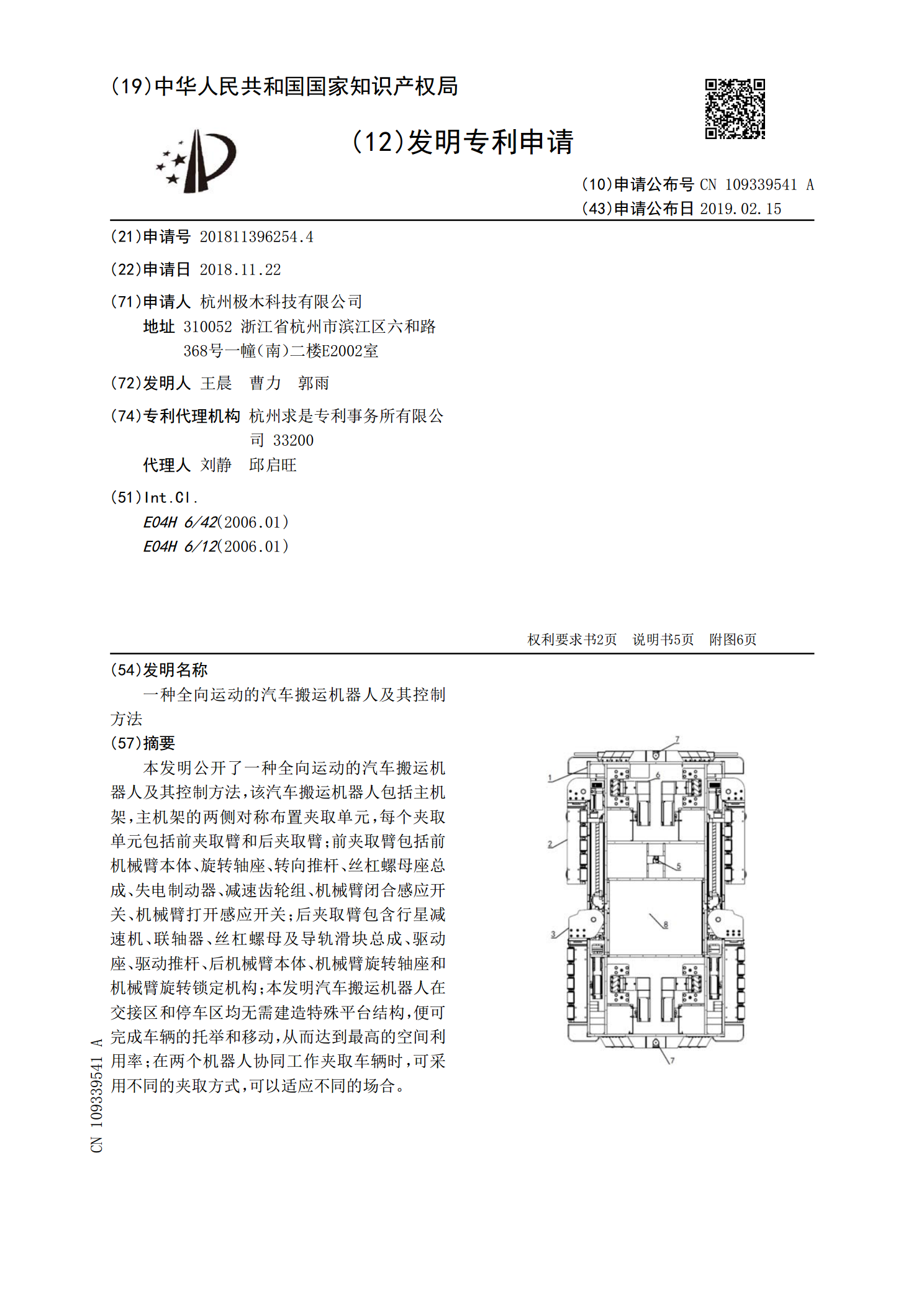
本发明公开了一种全向运动的汽车搬运机器人及其控制方法,该汽车搬运机器人包括主机架,主机架的两侧对称布置夹取单元,每个夹取单元包括前夹取臂和后夹取臂;前夹取臂包括前机械臂本体、旋转轴座、转向推杆、丝杠螺母座总成、失电制动器、减速齿轮组、机械臂闭合感应开关、机械臂打开感应开关;后夹取臂包含行星减速机、联轴器、丝杠螺母及导轨滑块总成、驱动座、驱动推杆、后机械臂本体、机械臂旋转轴座和机械臂旋转锁定机构;本发明汽车搬运机器人在交接区和停车区均无需建造特殊平台结构,便可完成车辆的托举和移动,从而达到最高的空间利用率;
一种潜入式汽车搬运机器人及其控制方法.pdf
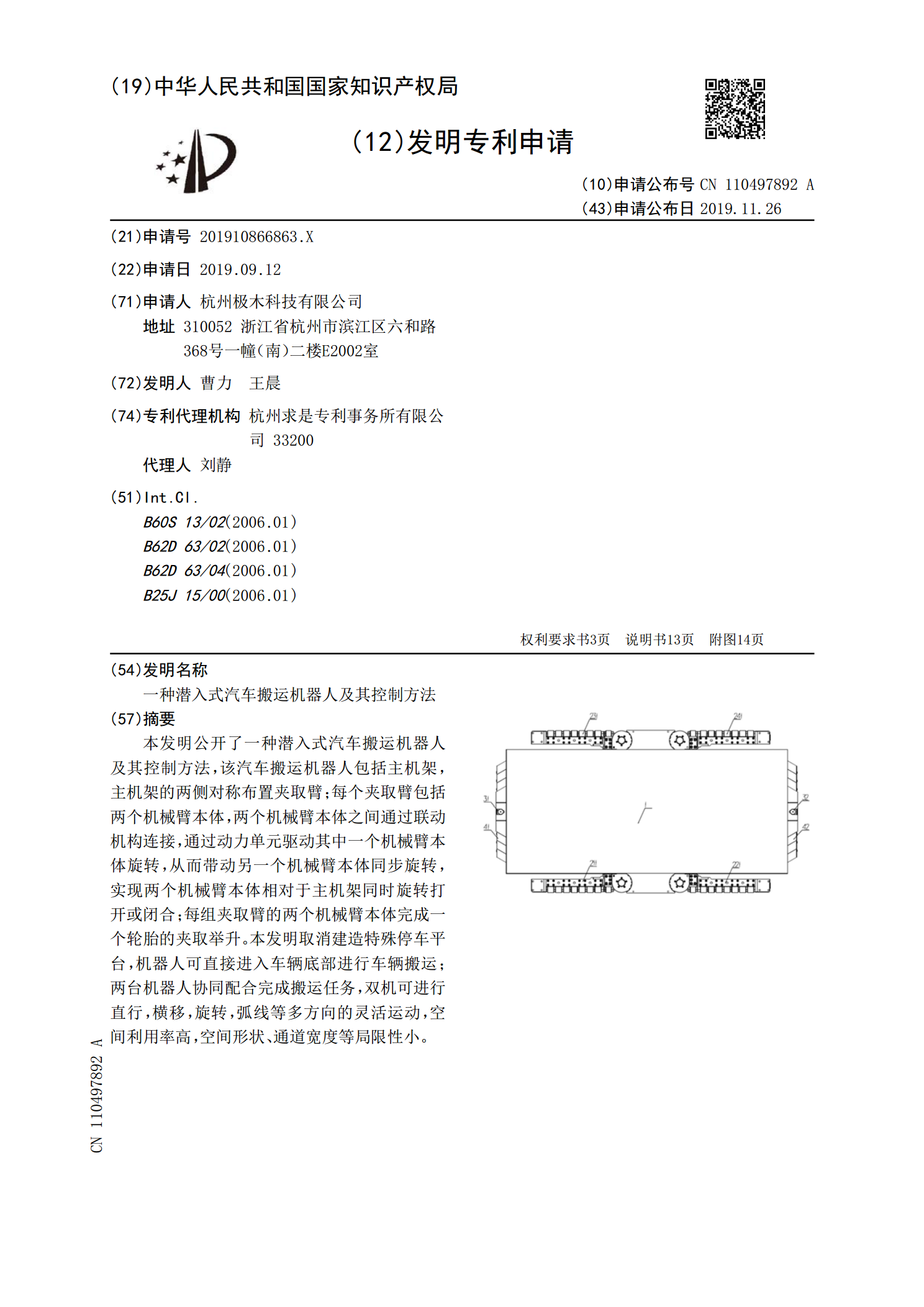
本发明公开了一种潜入式汽车搬运机器人及其控制方法,该汽车搬运机器人包括主机架,主机架的两侧对称布置夹取臂;每个夹取臂包括两个机械臂本体,两个机械臂本体之间通过联动机构连接,通过动力单元驱动其中一个机械臂本体旋转,从而带动另一个机械臂本体同步旋转,实现两个机械臂本体相对于主机架同时旋转打开或闭合;每组夹取臂的两个机械臂本体完成一个轮胎的夹取举升。本发明取消建造特殊停车平台,机器人可直接进入车辆底部进行车辆搬运;两台机器人协同配合完成搬运任务,双机可进行直行,横移,旋转,弧线等多方向的灵活运动,空间利用率高,
全向机器人及其控制方法.pdf
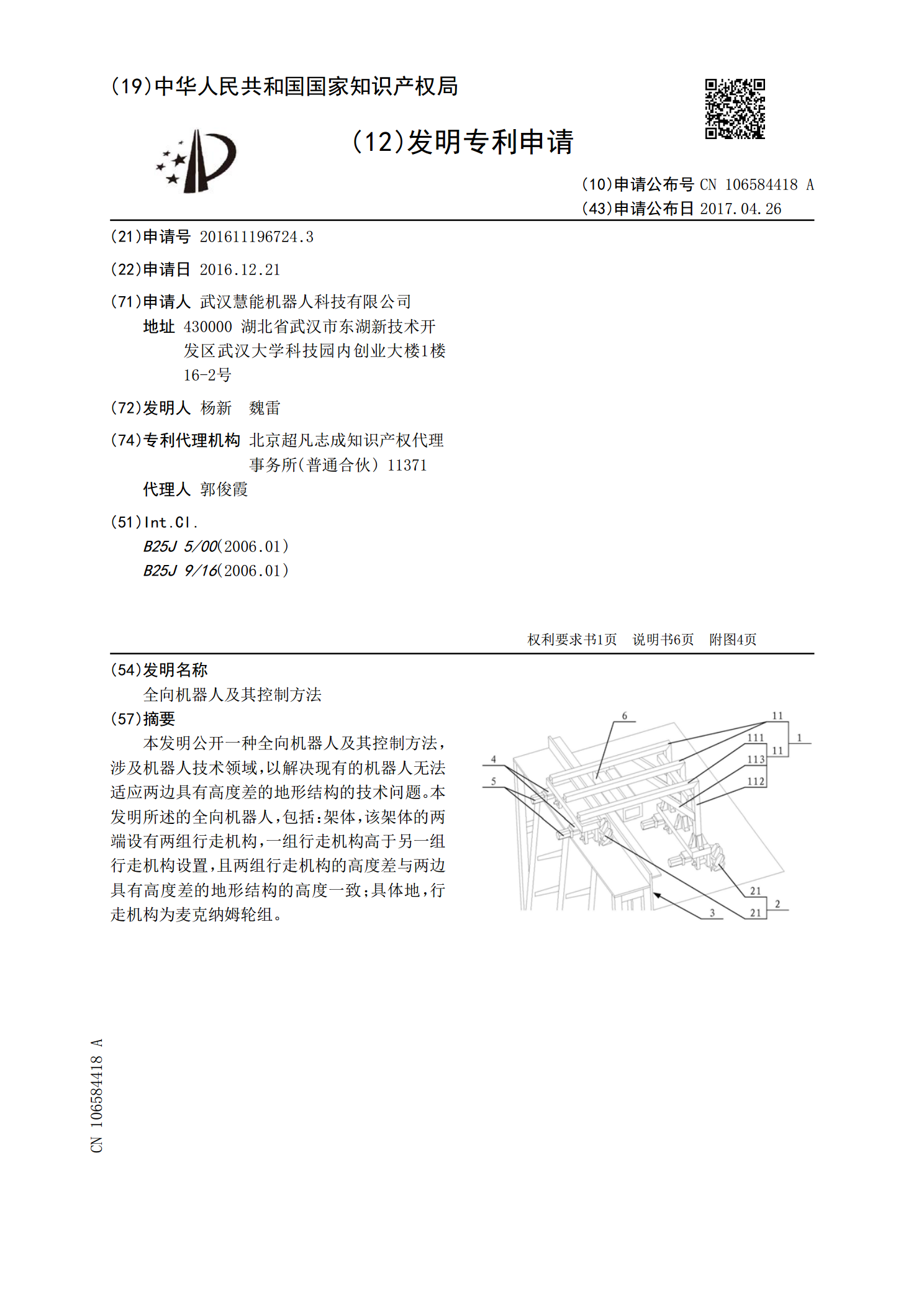
本发明公开一种全向机器人及其控制方法,涉及机器人技术领域,以解决现有的机器人无法适应两边具有高度差的地形结构的技术问题。本发明所述的全向机器人,包括:架体,该架体的两端设有两组行走机构,一组行走机构高于另一组行走机构设置,且两组行走机构的高度差与两边具有高度差的地形结构的高度一致;具体地,行走机构为麦克纳姆轮组。

一种全向汽车搬运装置.pdf
本发明涉及一种汽车搬运工具,特别涉及一种全向汽车搬运装置,解决立体车库的夹持轮胎搬运装置只能沿一个方向搬运的问题,包括车架及安装在车架上的夹臂、行走机构和智能控制器,其特征在于:行走机构包括可以调节行走方向的主动轮和若干万向从动轮,车架上固定有基座,基座上安装有相对基座转动的转向架,主动轮固定在转向架上,主动轮的轴线与转向架转动轴线垂直并相交。本发明实现了整个搬运装置的全向运动,并可以任意角度变向,前车架和后车架之间有伸缩连杆,可以根据汽车前后轮轴距的不同对搬运装置的长度进行调节。

一种智能全向搬运机器人.pdf
本发明涉及一种智能全向搬运机器人,具有机架和全向轮;所述全向轮安装在机架上;所述机架包括基准底板和上层机架;所述基准底板上基准定位加工有定位连接孔;所述上层机架固定连接在基准底板上。本发明制造精度高,装配高效快捷,结构强度高,使用寿命长,后期维修方便。