
全向轮式平台及其行走控制方法.pdf

书生****写意

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
全向轮式平台及其行走控制方法.pdf
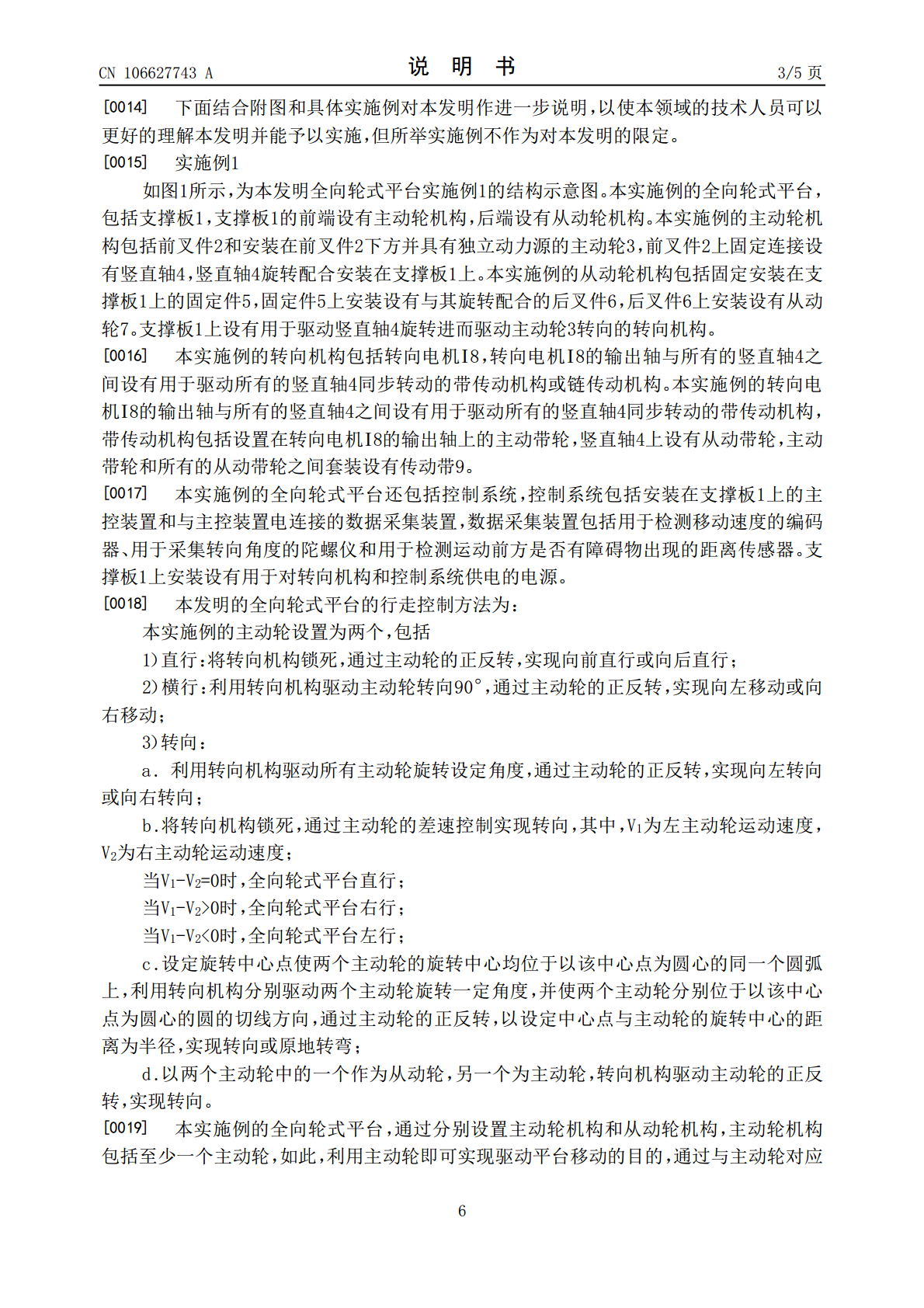
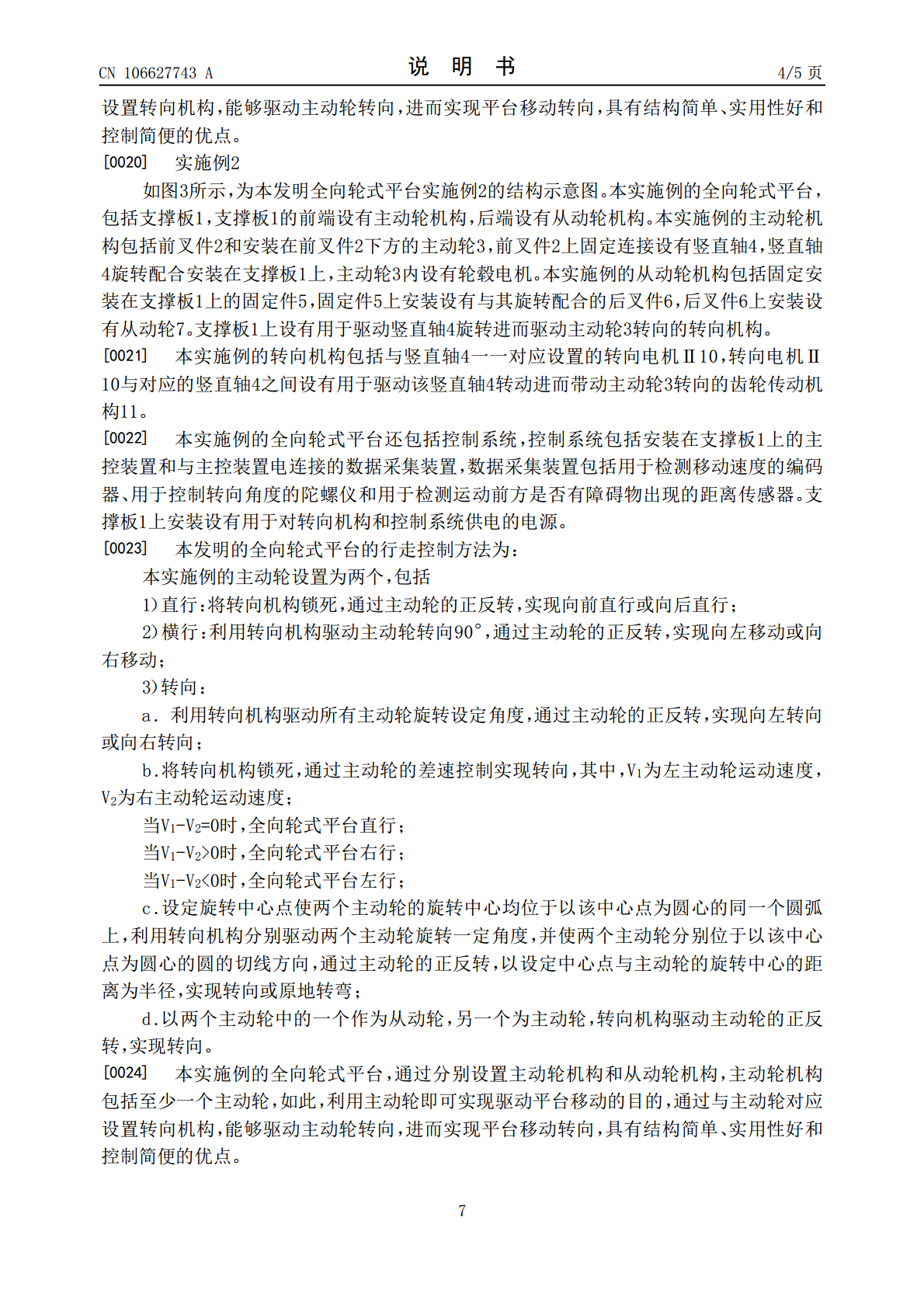
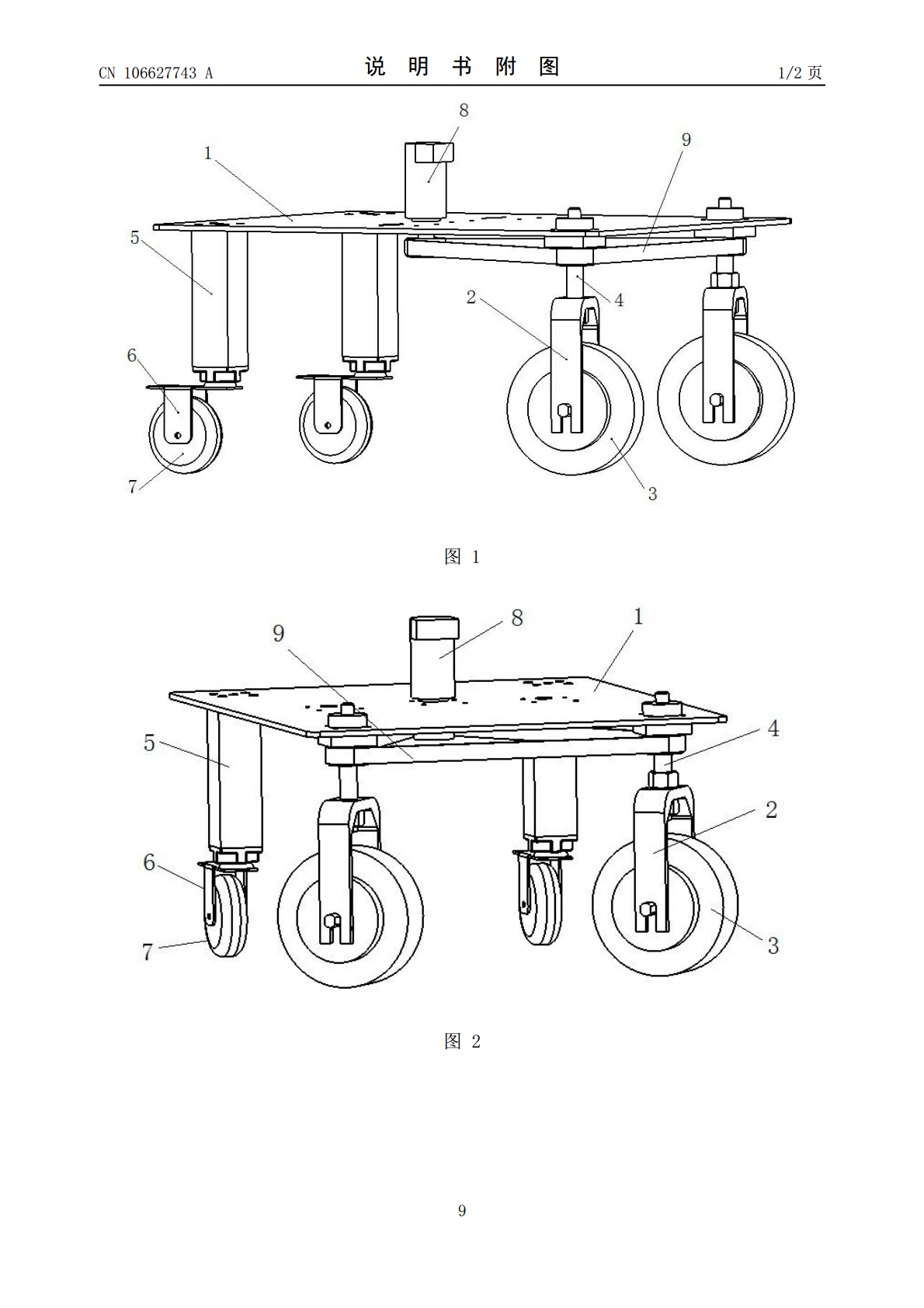
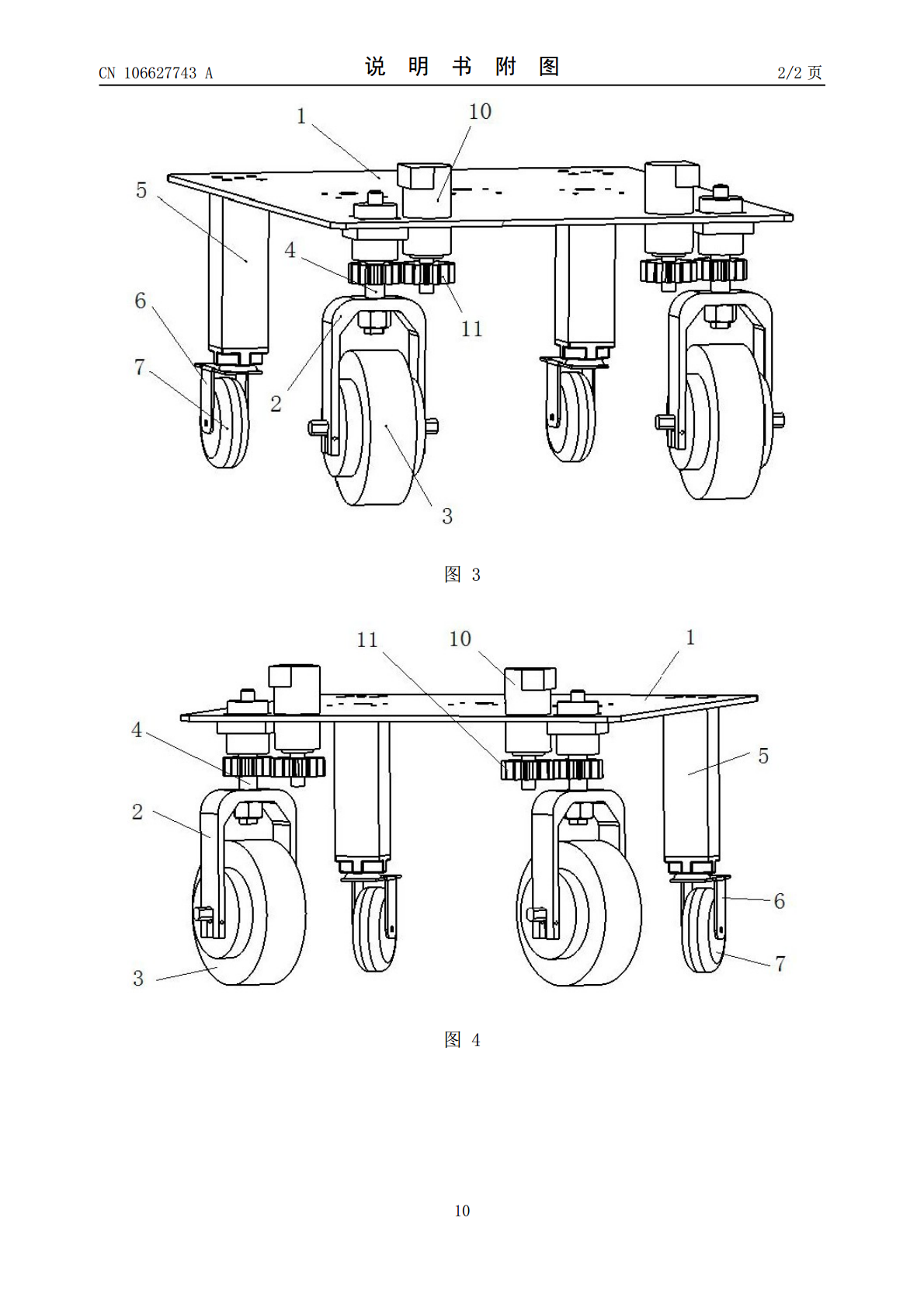
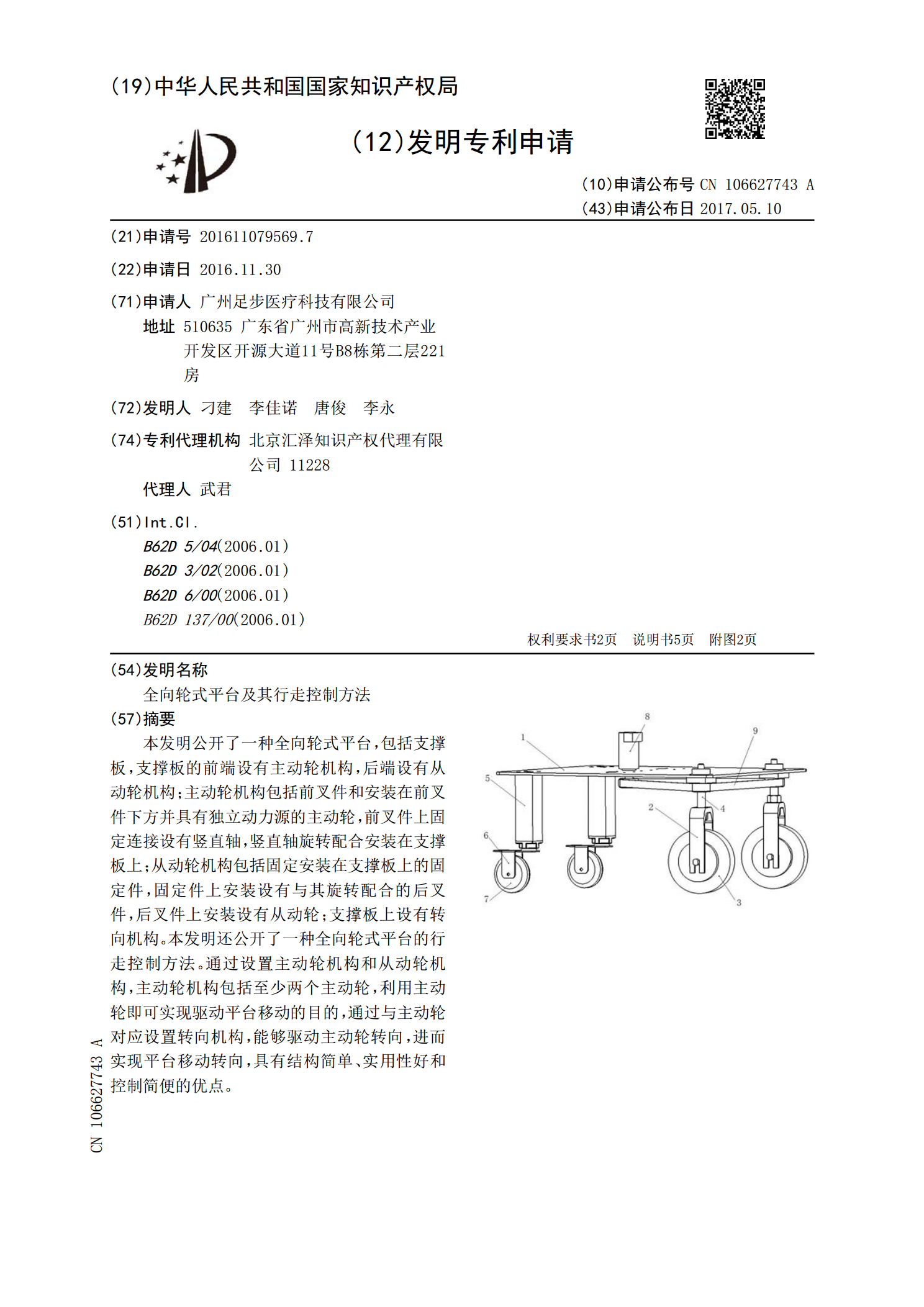
本发明公开了一种全向轮式平台,包括支撑板,支撑板的前端设有主动轮机构,后端设有从动轮机构;主动轮机构包括前叉件和安装在前叉件下方并具有独立动力源的主动轮,前叉件上固定连接设有竖直轴,竖直轴旋转配合安装在支撑板上;从动轮机构包括固定安装在支撑板上的固定件,固定件上安装设有与其旋转配合的后叉件,后叉件上安装设有从动轮;支撑板上设有转向机构。本发明还公开了一种全向轮式平台的行走控制方法。通过设置主动轮机构和从动轮机构,主动轮机构包括至少两个主动轮,利用主动轮即可实现驱动平台移动的目的,通过与主动轮对应设置转向机

一种轮式全向移动底盘及其控制方法.pdf
本发明公开了一种轮式全向移动底盘及其控制方法,包括底盘,所述底盘包括水平设置的框架和固定在框架内的Y型支架,所述Y型支架包括三条支臂:支臂A、支臂B和支臂C,在三条支臂上分别设置一个电机,在三个电机的输出轴上分别设置一个全向滚轮,每个电机能够带动对应的全向滚轮转动;在Y型支架上还设有控制器和电源,所述控制器与三个电机相连,并能够控制三个电机同时或分别工作;所述电源为控制器和三个电机供电;所述控制方法能够实现底盘的横向移动、前后移动以及原地转动。本发明能够进行横向行驶,转弯半径小,并能够原地转向,从而能够大
一种轮式摊铺机行走系统及其控制方法.pdf
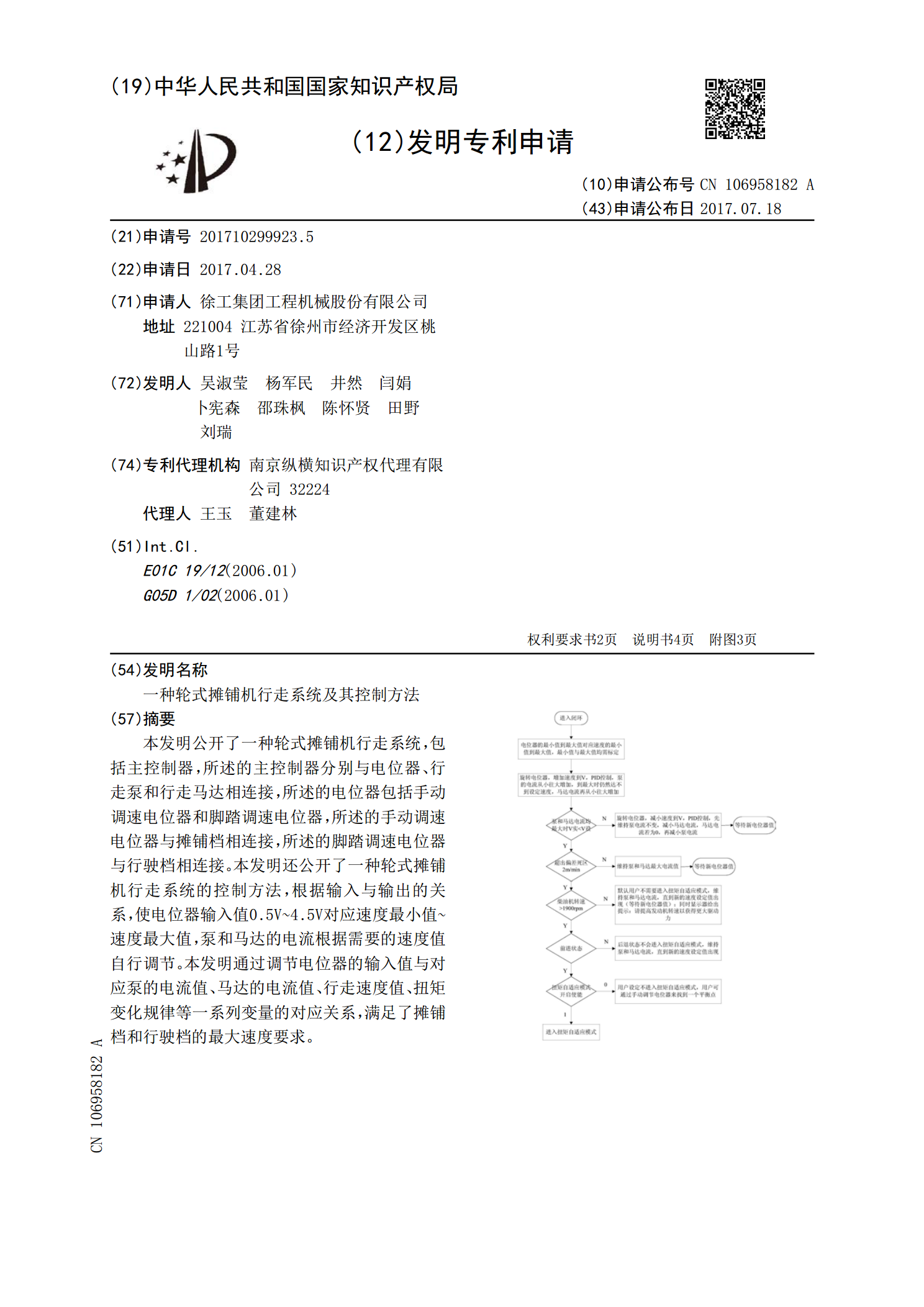
本发明公开了一种轮式摊铺机行走系统,包括主控制器,所述的主控制器分别与电位器、行走泵和行走马达相连接,所述的电位器包括手动调速电位器和脚踏调速电位器,所述的手动调速电位器与摊铺档相连接,所述的脚踏调速电位器与行驶档相连接。本发明还公开了一种轮式摊铺机行走系统的控制方法,根据输入与输出的关系,使电位器输入值0.5V~4.5V对应速度最小值~速度最大值,泵和马达的电流根据需要的速度值自行调节。本发明通过调节电位器的输入值与对应泵的电流值、马达的电流值、行走速度值、扭矩变化规律等一系列变量的对应关系,满足了摊铺
角度可控动力差速全向轮及其控制方法以及全向移动平台.pdf
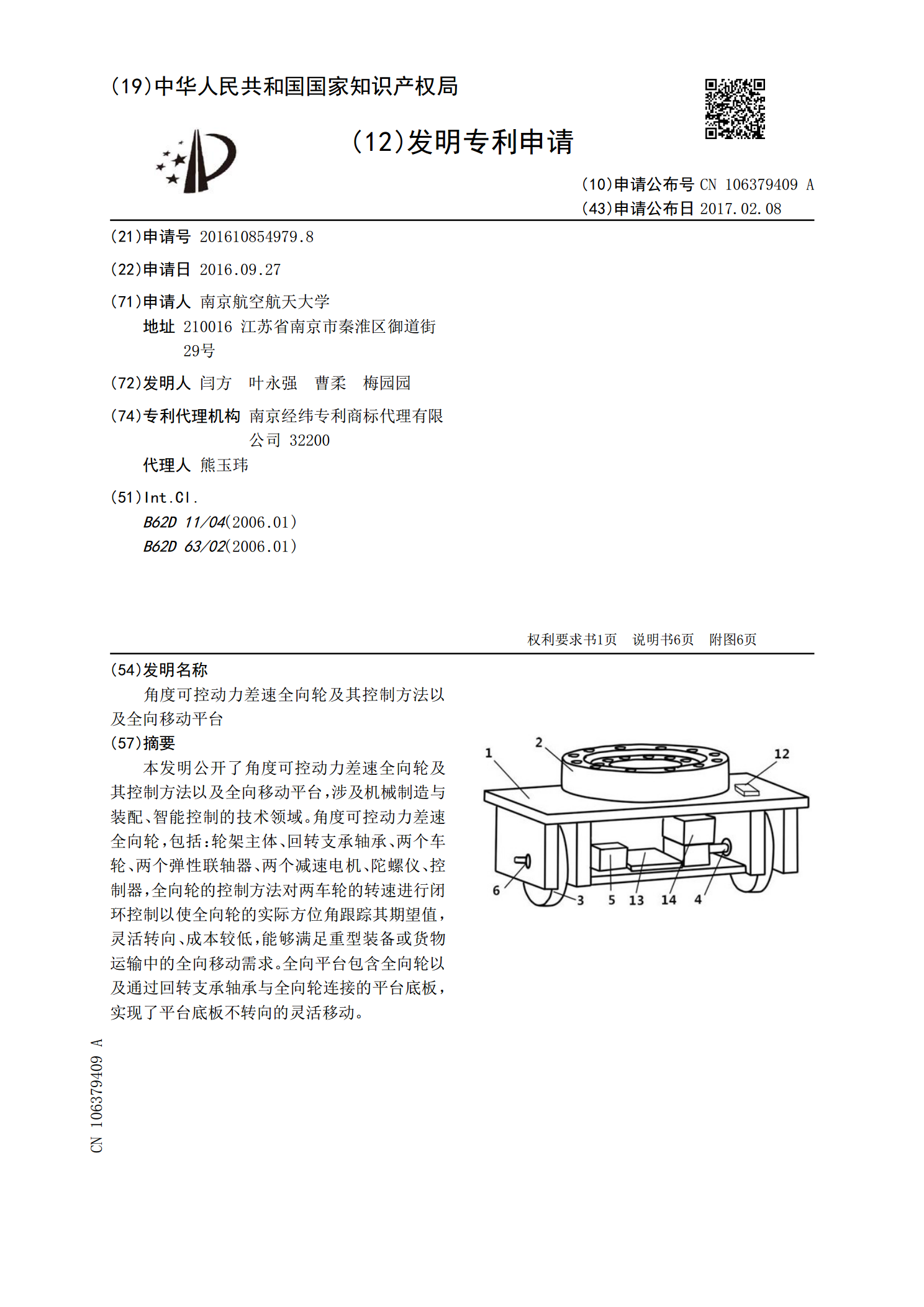
本发明公开了角度可控动力差速全向轮及其控制方法以及全向移动平台,涉及机械制造与装配、智能控制的技术领域。角度可控动力差速全向轮,包括:轮架主体、回转支承轴承、两个车轮、两个弹性联轴器、两个减速电机、陀螺仪、控制器,全向轮的控制方法对两车轮的转速进行闭环控制以使全向轮的实际方位角跟踪其期望值,灵活转向、成本较低,能够满足重型装备或货物运输中的全向移动需求。全向平台包含全向轮以及通过回转支承轴承与全向轮连接的平台底板,实现了平台底板不转向的灵活移动。
一种全向移动轮式机器人平台及控制方法.pdf
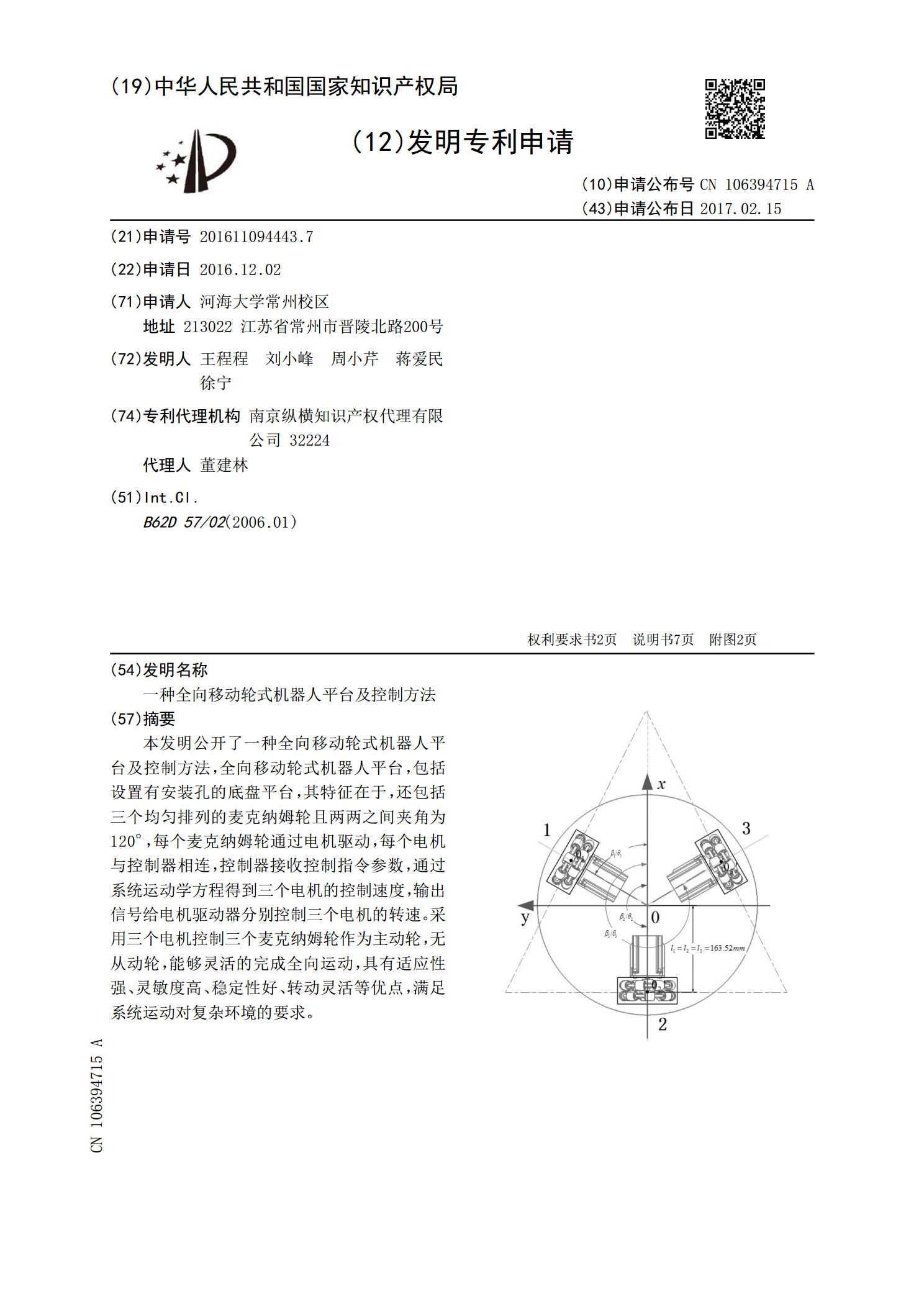
本发明公开了一种全向移动轮式机器人平台及控制方法,全向移动轮式机器人平台,包括设置有安装孔的底盘平台,其特征在于,还包括三个均匀排列的麦克纳姆轮且两两之间夹角为120°,每个麦克纳姆轮通过电机驱动,每个电机与控制器相连,控制器接收控制指令参数,通过系统运动学方程得到三个电机的控制速度,输出信号给电机驱动器分别控制三个电机的转速。采用三个电机控制三个麦克纳姆轮作为主动轮,无从动轮,能够灵活的完成全向运动,具有适应性强、灵敏度高、稳定性好、转动灵活等优点,满足系统运动对复杂环境的要求。