
一种基于激光雷达的车辆轮轴识别系统及方法.pdf

悠柔****找我

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于激光雷达的车辆轮轴识别系统及方法.pdf
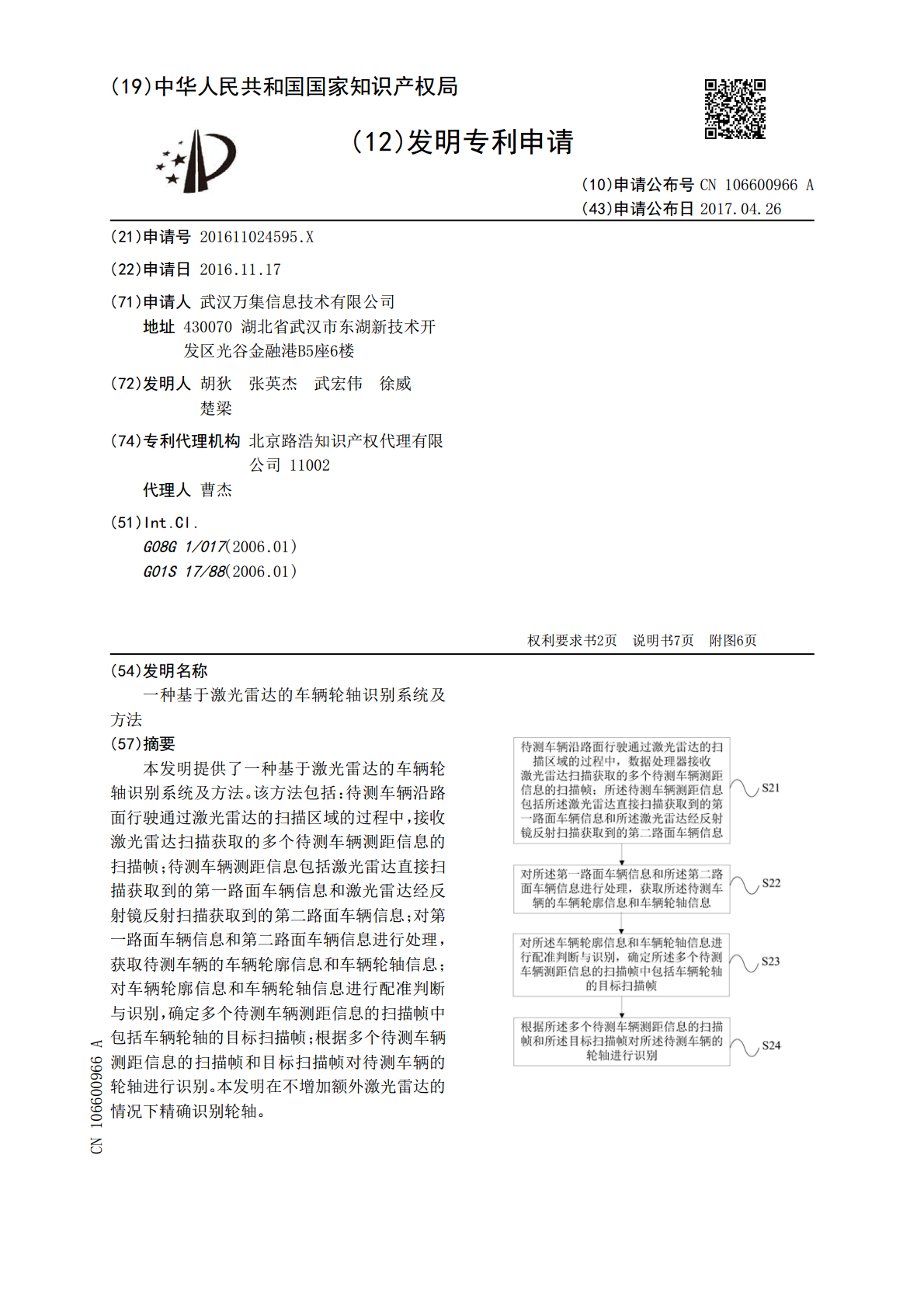
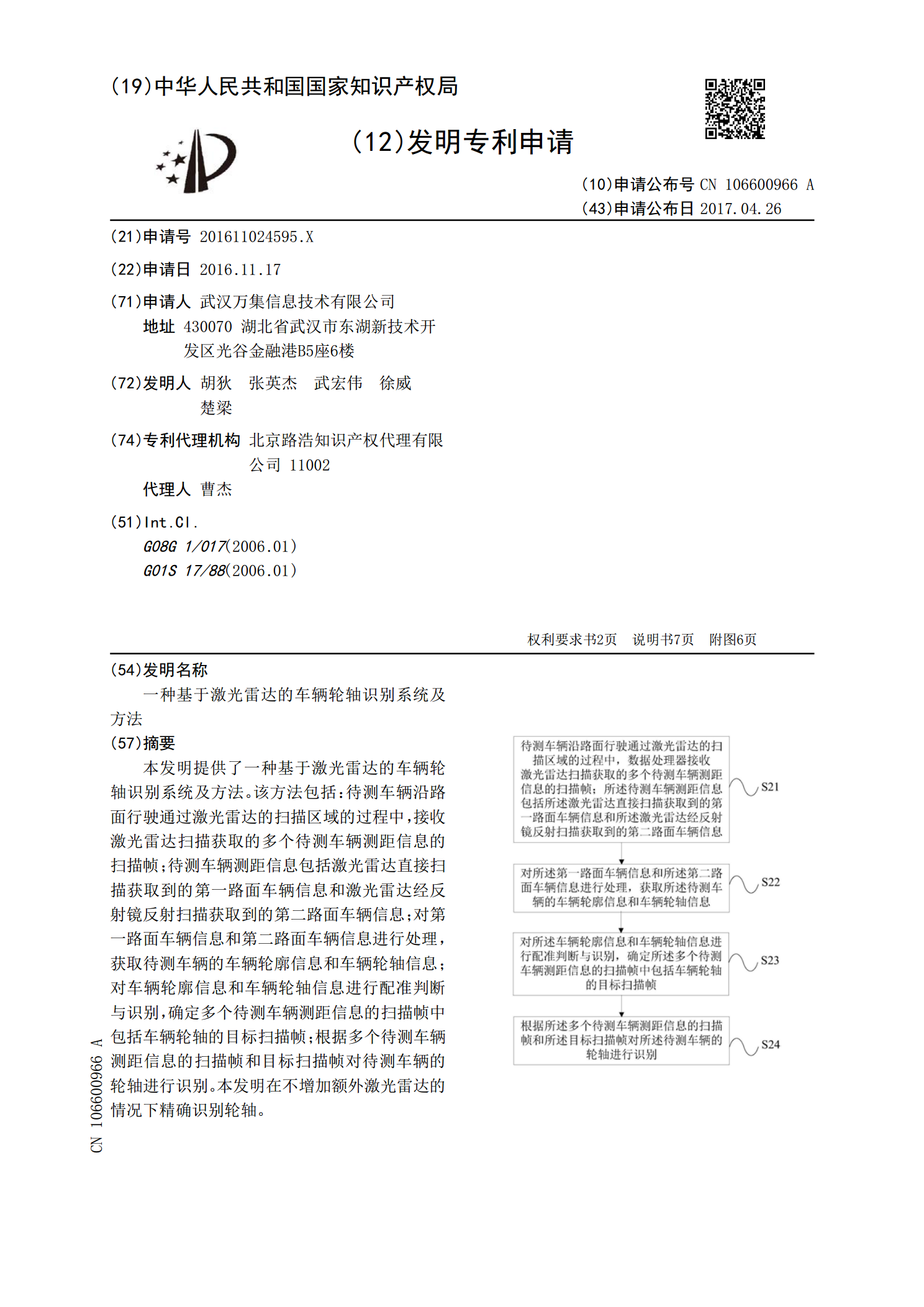
本发明提供了一种基于激光雷达的车辆轮轴识别系统及方法。该方法包括:待测车辆沿路面行驶通过激光雷达的扫描区域的过程中,接收激光雷达扫描获取的多个待测车辆测距信息的扫描帧;待测车辆测距信息包括激光雷达直接扫描获取到的第一路面车辆信息和激光雷达经反射镜反射扫描获取到的第二路面车辆信息;对第一路面车辆信息和第二路面车辆信息进行处理,获取待测车辆的车辆轮廓信息和车辆轮轴信息;对车辆轮廓信息和车辆轮轴信息进行配准判断与识别,确定多个待测车辆测距信息的扫描帧中包括车辆轮轴的目标扫描帧;根据多个待测车辆测距信息的扫描帧和

车辆轮轴识别系统.pdf
本发明公开了车辆轮轴识别系统,包括中央处理器以及分别与中央处理器信号连接的轮轴识别传感器、重量传感器和红外线传感器;轮轴识别传感器,用来检测行车的轴型、胎型类型信息,并将类型信息传递给中央处理器;红外线传感器,用来检测车辆的到来与离开,并将检测信号传送至中央处理器;重量传感器,用来检测通过车辆的轴重并将重量信号传递给中央处理器;中央处理器内预先设置有轮轴信息表,中央处理器在接收到红外线传感器发送来的检测到来车的检测信号后使重量传感器和轮轴识别传感器开始工作。
一种基于激光雷达的停车道车辆检测方法.pdf
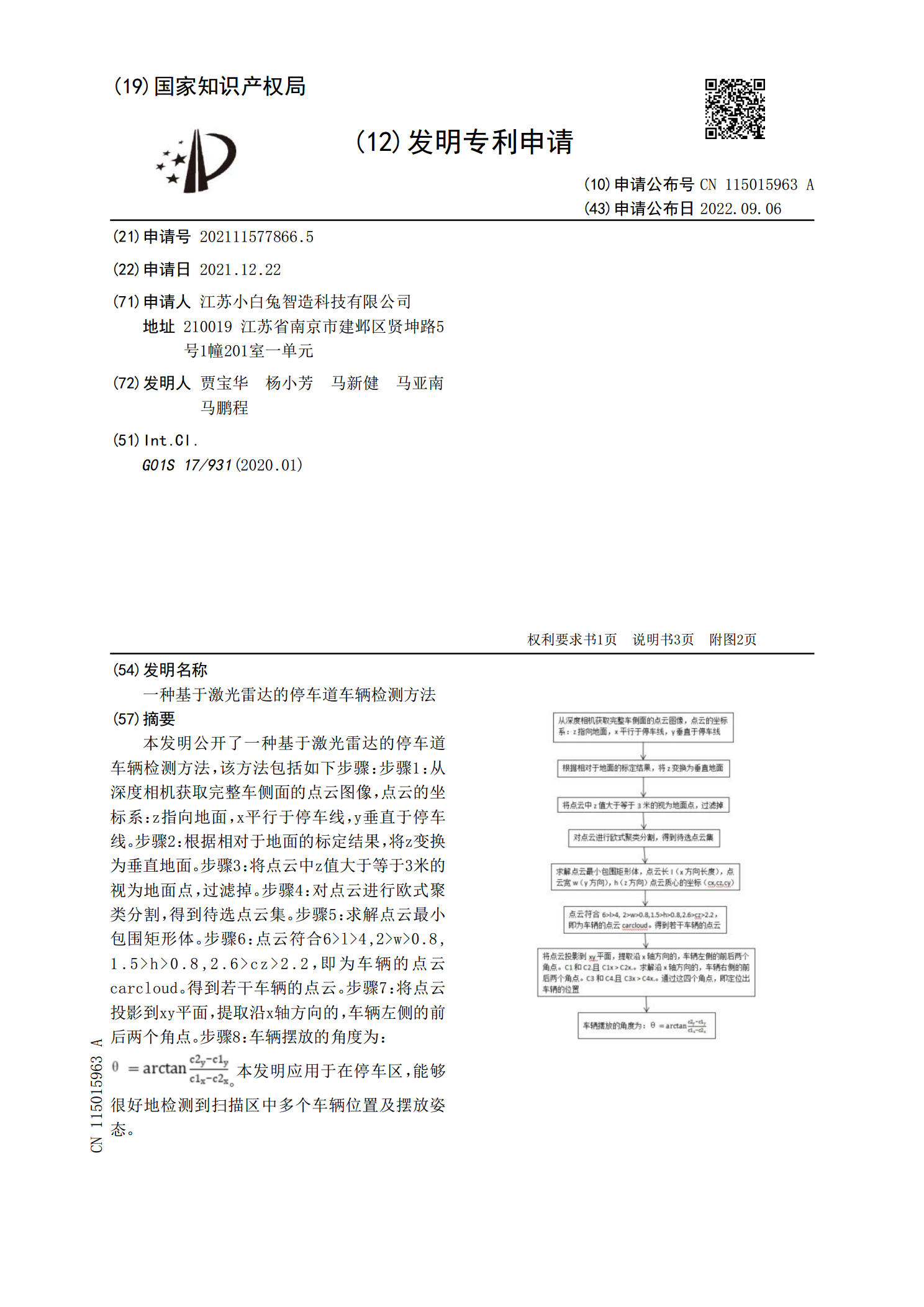
本发明公开了一种基于激光雷达的停车道车辆检测方法,该方法包括如下步骤:步骤1:从深度相机获取完整车侧面的点云图像,点云的坐标系:z指向地面,x平行于停车线,y垂直于停车线。步骤2:根据相对于地面的标定结果,将z变换为垂直地面。步骤3:将点云中z值大于等于3米的视为地面点,过滤掉。步骤4:对点云进行欧式聚类分割,得到待选点云集。步骤5:求解点云最小包围矩形体。步骤6:点云符合6>l>4,2>w>0.8,1.5>h>0.8,2
一种基于激光雷达的车辆外廓检测方法及系统.pdf
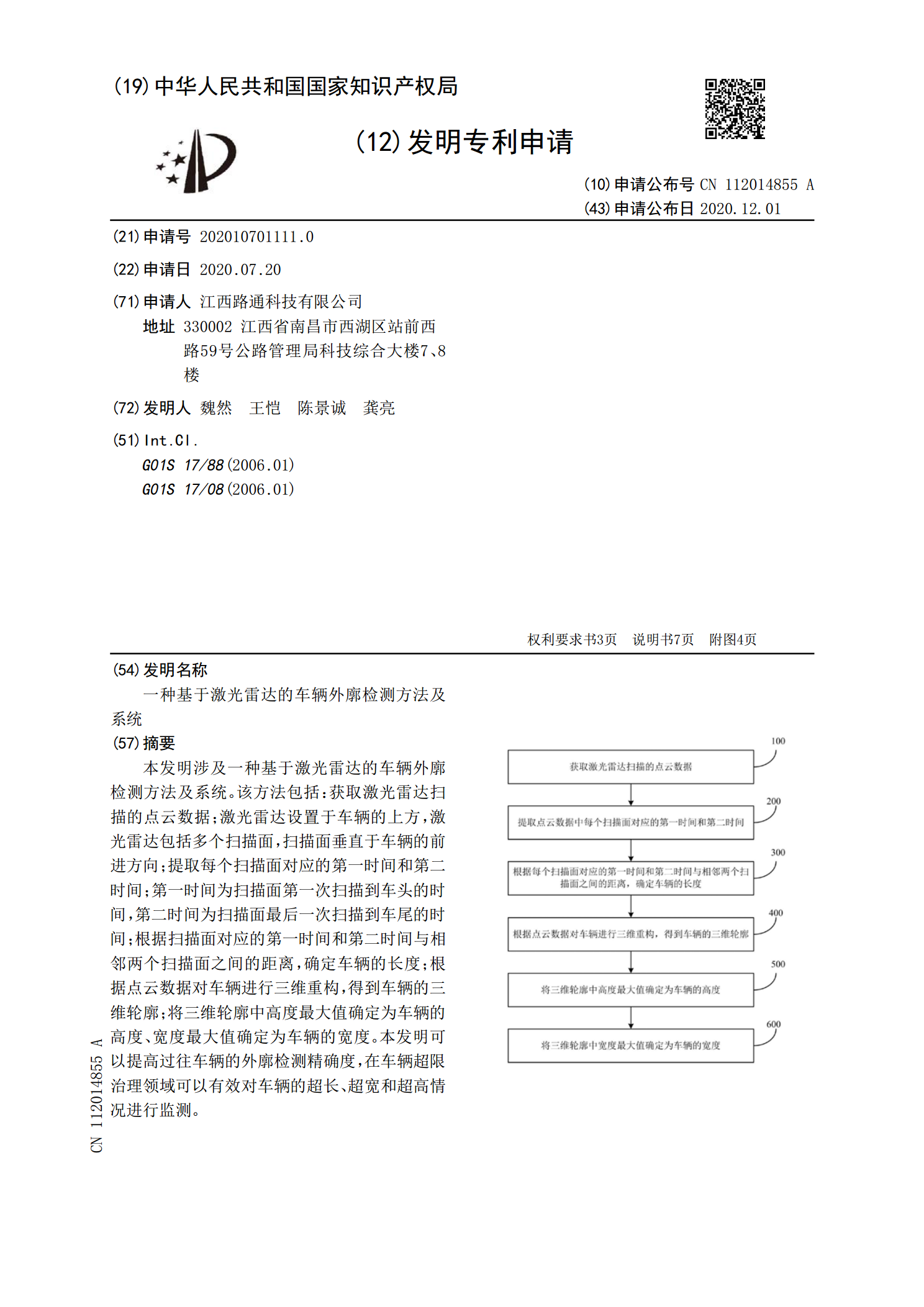
本发明涉及一种基于激光雷达的车辆外廓检测方法及系统。该方法包括:获取激光雷达扫描的点云数据;激光雷达设置于车辆的上方,激光雷达包括多个扫描面,扫描面垂直于车辆的前进方向;提取每个扫描面对应的第一时间和第二时间;第一时间为扫描面第一次扫描到车头的时间,第二时间为扫描面最后一次扫描到车尾的时间;根据扫描面对应的第一时间和第二时间与相邻两个扫描面之间的距离,确定车辆的长度;根据点云数据对车辆进行三维重构,得到车辆的三维轮廓;将三维轮廓中高度最大值确定为车辆的高度、宽度最大值确定为车辆的宽度。本发明可以提高过往车
一种基于激光雷达的电梯位姿识别系统及方法.pdf
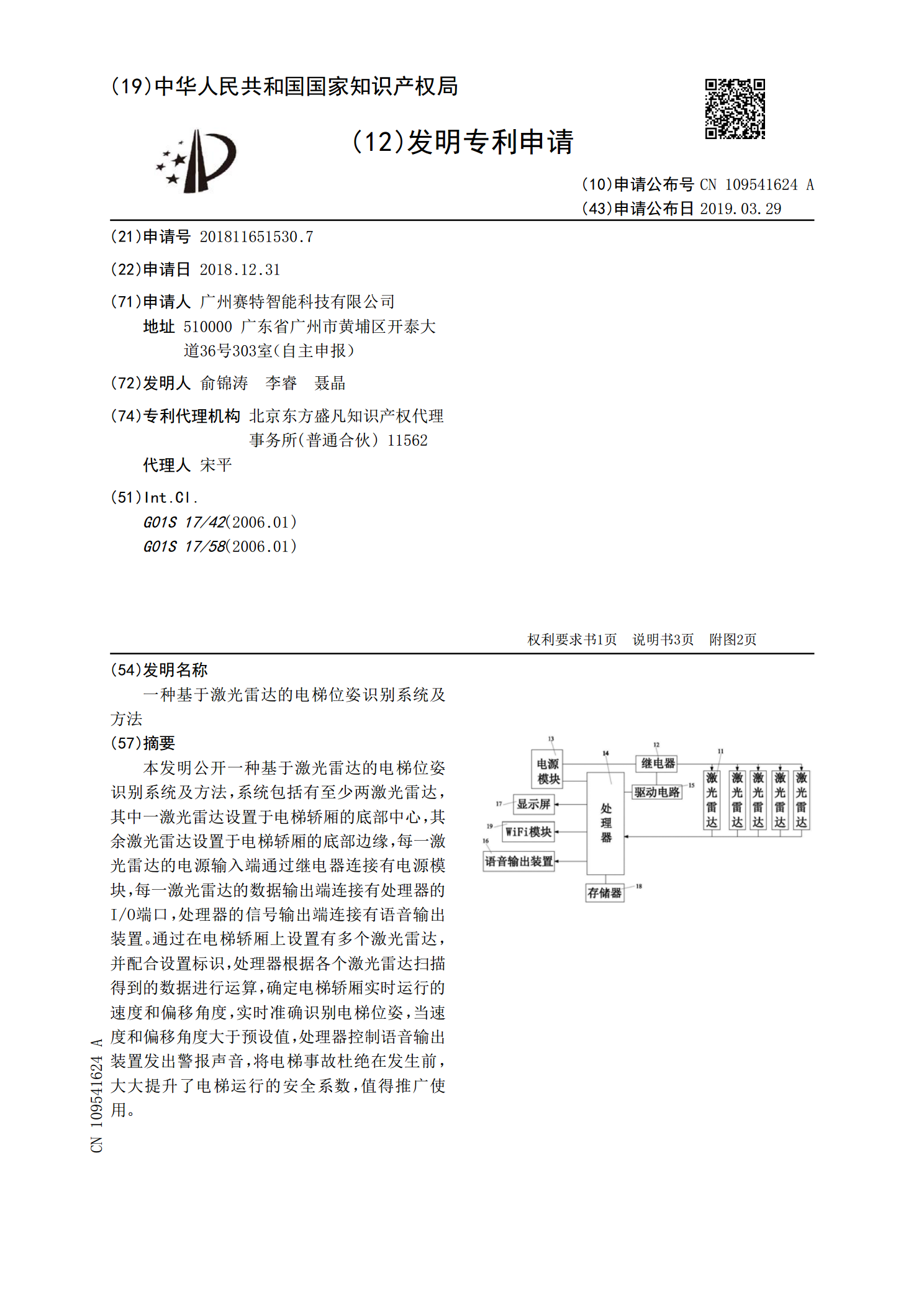
本发明公开一种基于激光雷达的电梯位姿识别系统及方法,系统包括有至少两激光雷达,其中一激光雷达设置于电梯轿厢的底部中心,其余激光雷达设置于电梯轿厢的底部边缘,每一激光雷达的电源输入端通过继电器连接有电源模块,每一激光雷达的数据输出端连接有处理器的I/O端口,处理器的信号输出端连接有语音输出装置。通过在电梯轿厢上设置有多个激光雷达,并配合设置标识,处理器根据各个激光雷达扫描得到的数据进行运算,确定电梯轿厢实时运行的速度和偏移角度,实时准确识别电梯位姿,当速度和偏移角度大于预设值,处理器控制语音输出装置发出警报