
一种基于激光雷达的停车道车辆检测方法.pdf

子璇****君淑

1/7

2/7
3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于激光雷达的停车道车辆检测方法.pdf
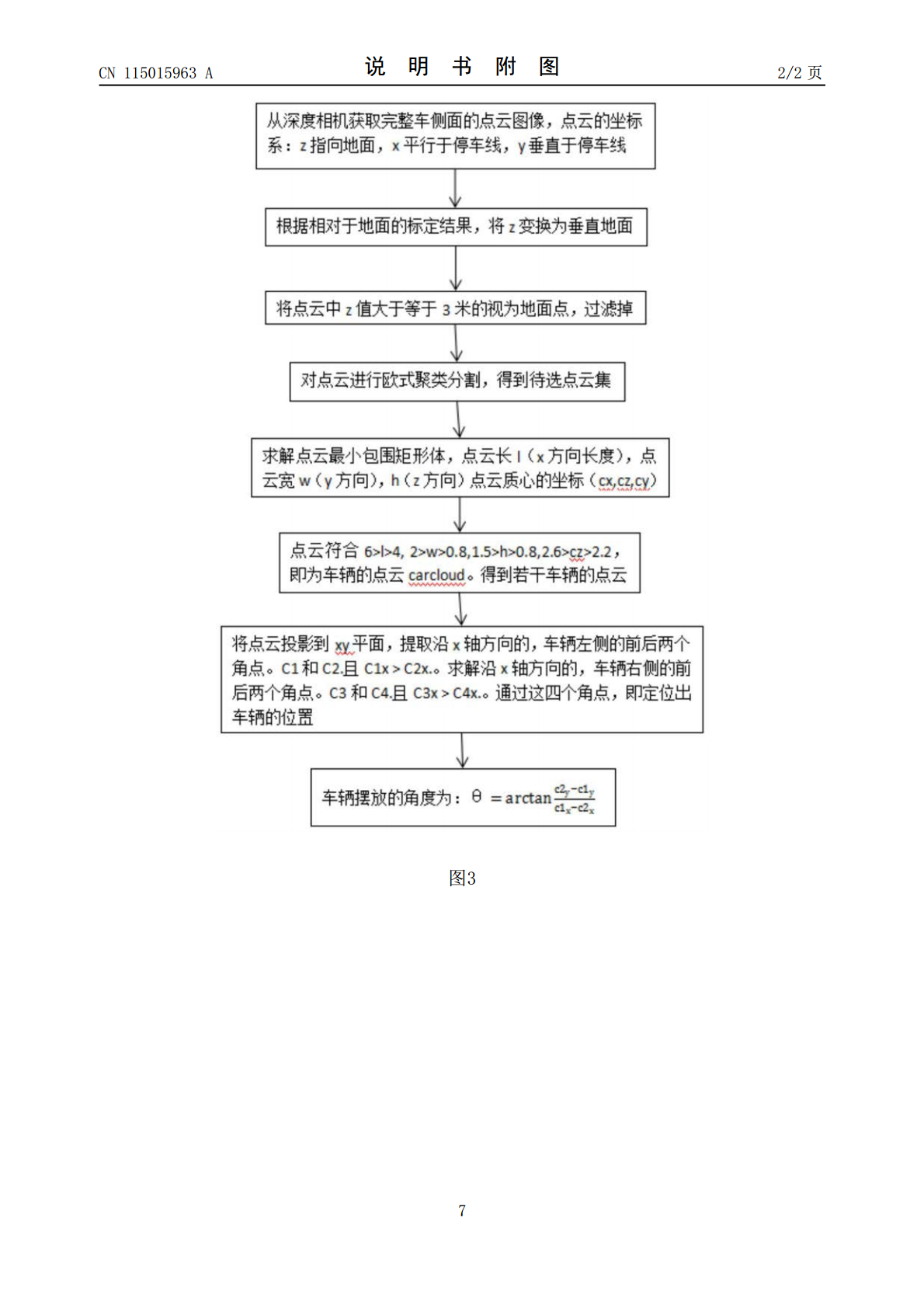
本发明公开了一种基于激光雷达的停车道车辆检测方法,该方法包括如下步骤:步骤1:从深度相机获取完整车侧面的点云图像,点云的坐标系:z指向地面,x平行于停车线,y垂直于停车线。步骤2:根据相对于地面的标定结果,将z变换为垂直地面。步骤3:将点云中z值大于等于3米的视为地面点,过滤掉。步骤4:对点云进行欧式聚类分割,得到待选点云集。步骤5:求解点云最小包围矩形体。步骤6:点云符合6>l>4,2>w>0.8,1.5>h>0.8,2

基于车道检测的车辆检测方法的综述报告.docx
基于车道检测的车辆检测方法的综述报告车辆检测是计算机视觉技术中的一个重要研究方向,其在智能交通、智能安防等领域中具有重要的应用价值。车辆检测主要是指从图像或视频中识别出车辆,并对车辆进行跟踪和分类。其中,车道检测是车辆检测中的一个基础环节,因为只有确定了车道,才能对车辆行驶状态进行判断和分析。本文将对基于车道检测的车辆检测方法进行综述。1.基于图像处理的车道检测法基于图像处理的车道检测法是一种基本的车道检测方法,其思想是先对图像进行预处理,然后通过摄像机校准和车道模型建立来识别车道。该方法主要有以下几个步
一种基于激光雷达的车辆外廓检测方法及系统.pdf
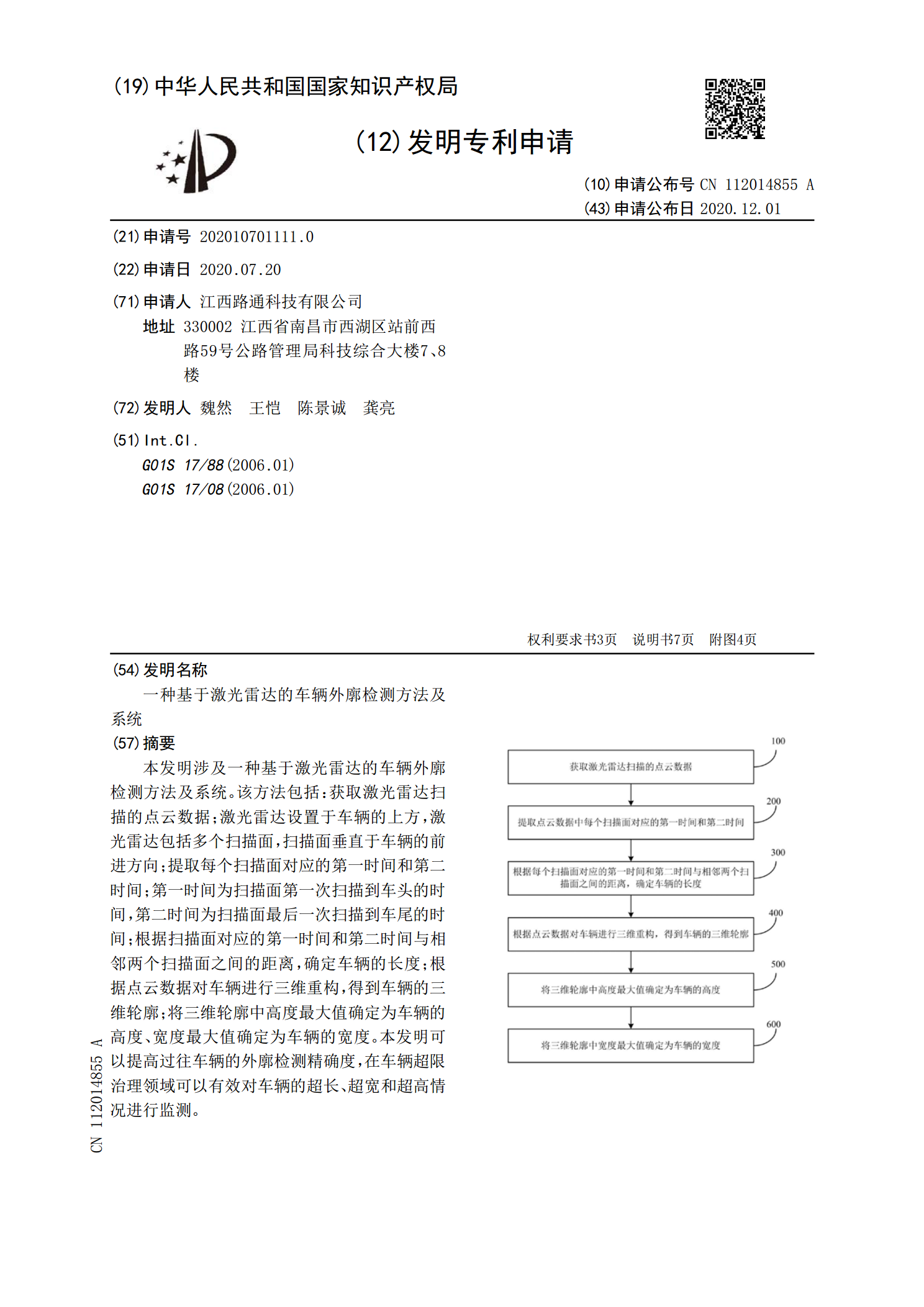
本发明涉及一种基于激光雷达的车辆外廓检测方法及系统。该方法包括:获取激光雷达扫描的点云数据;激光雷达设置于车辆的上方,激光雷达包括多个扫描面,扫描面垂直于车辆的前进方向;提取每个扫描面对应的第一时间和第二时间;第一时间为扫描面第一次扫描到车头的时间,第二时间为扫描面最后一次扫描到车尾的时间;根据扫描面对应的第一时间和第二时间与相邻两个扫描面之间的距离,确定车辆的长度;根据点云数据对车辆进行三维重构,得到车辆的三维轮廓;将三维轮廓中高度最大值确定为车辆的高度、宽度最大值确定为车辆的宽度。本发明可以提高过往车

基于激光雷达回波信号的车道线检测方法研究.docx
基于激光雷达回波信号的车道线检测方法研究摘要车道线检测是自动驾驶领域中的关键技术之一,而激光雷达被广泛应用于自动驾驶领域中。本论文基于激光雷达回波信号,研究车道线检测方法。首先介绍了车道线检测的意义和现状,然后分析了激光雷达回波信号的特点,并根据特点提出了基于局部极值点的车道线检测算法。将该算法应用于KITTI数据集进行测试,结果表明该算法可以取得较高的准确率和鲁棒性。最后进行了未来展望和结论。关键词:车道线检测;激光雷达回波信号;局部极值点;KITTI数据集AbstractLanedetectionis
一种基于激光雷达点云的车辆目标检测方法.pdf
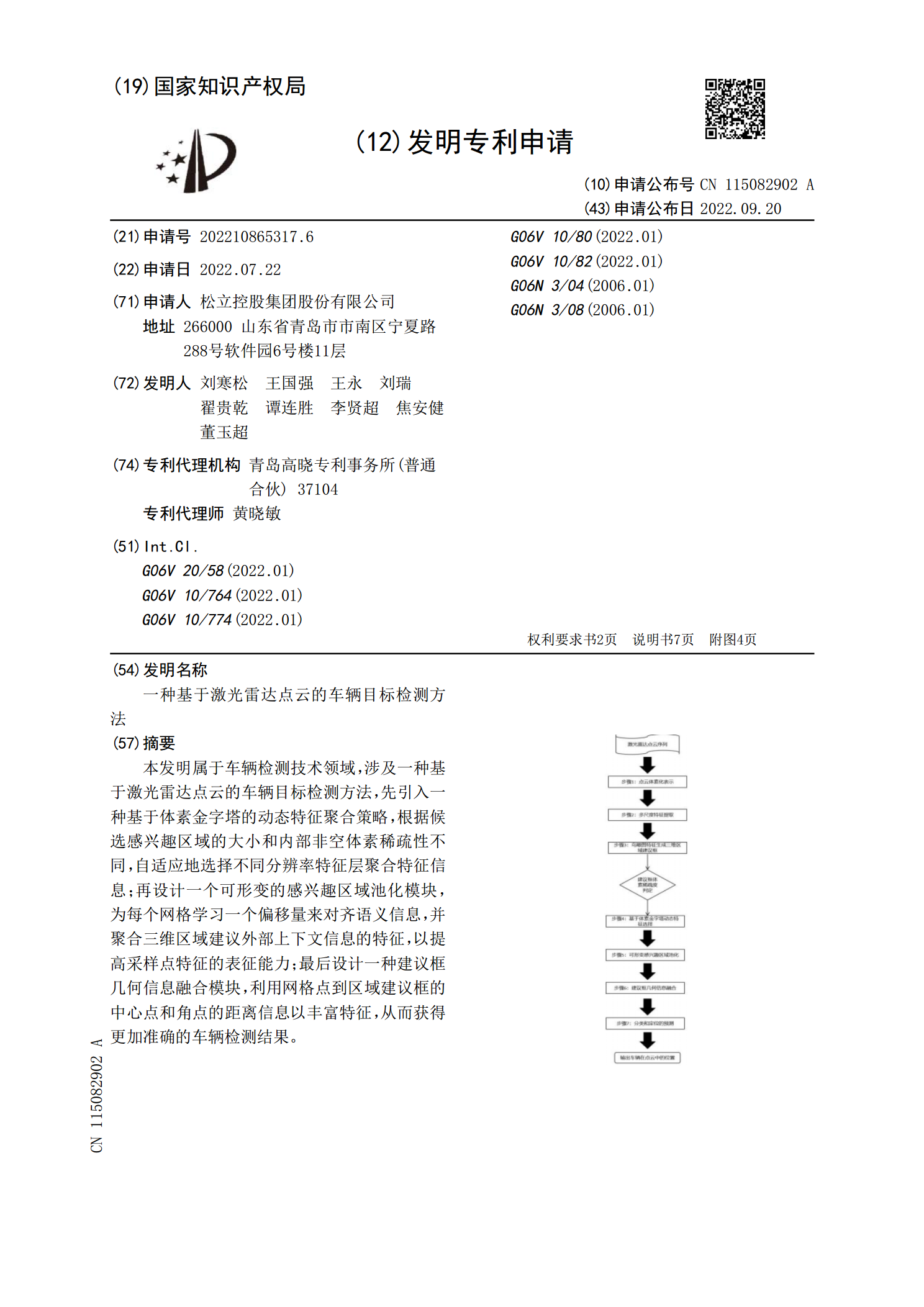
本发明属于车辆检测技术领域,涉及一种基于激光雷达点云的车辆目标检测方法,先引入一种基于体素金字塔的动态特征聚合策略,根据候选感兴趣区域的大小和内部非空体素稀疏性不同,自适应地选择不同分辨率特征层聚合特征信息;再设计一个可形变的感兴趣区域池化模块,为每个网格学习一个偏移量来对齐语义信息,并聚合三维区域建议外部上下文信息的特征,以提高采样点特征的表征能力;最后设计一种建议框几何信息融合模块,利用网格点到区域建议框的中心点和角点的距离信息以丰富特征,从而获得更加准确的车辆检测结果。