
一种基于激光雷达的电梯位姿识别系统及方法.pdf

佳晨****ng

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于激光雷达的电梯位姿识别系统及方法.pdf
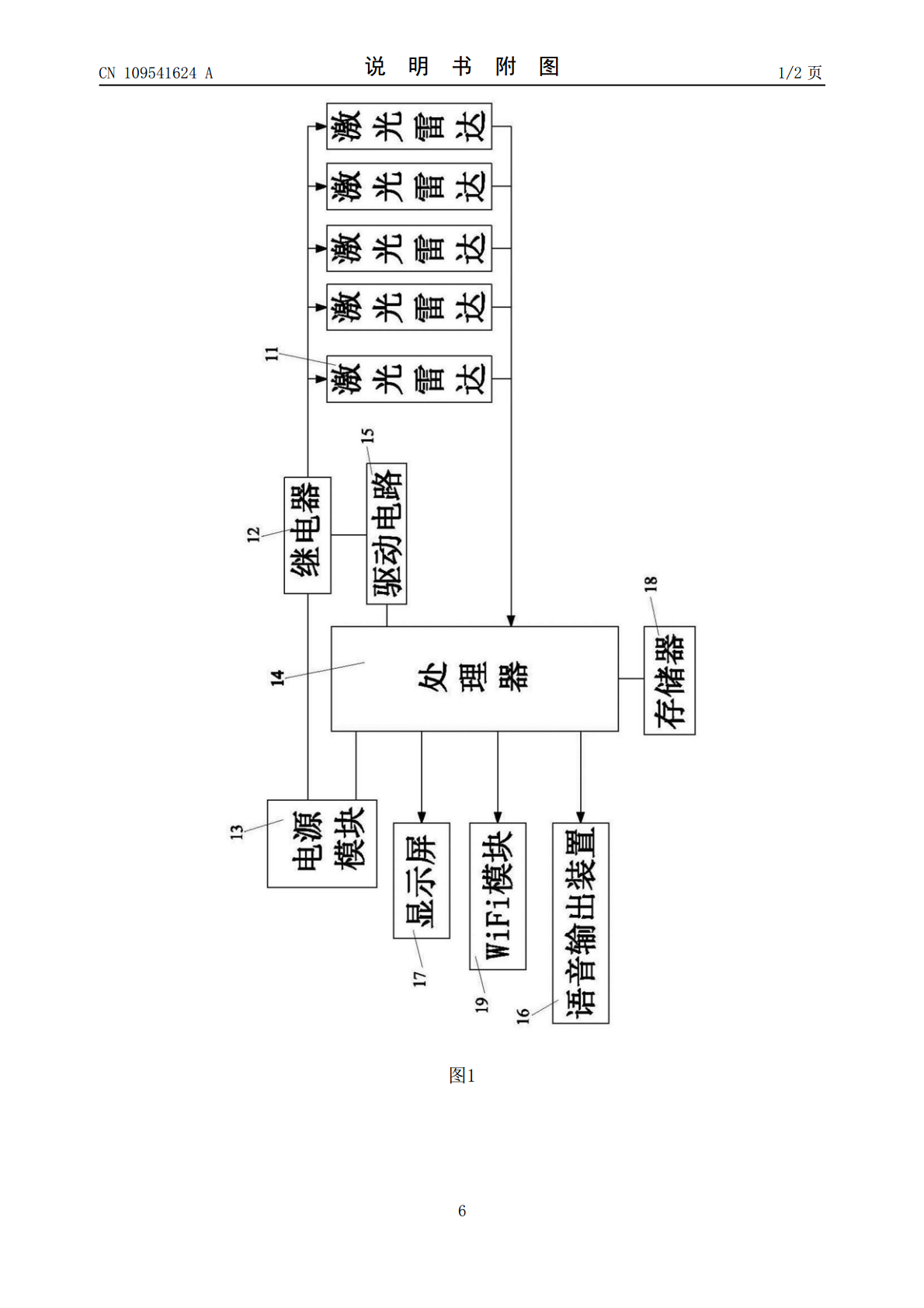
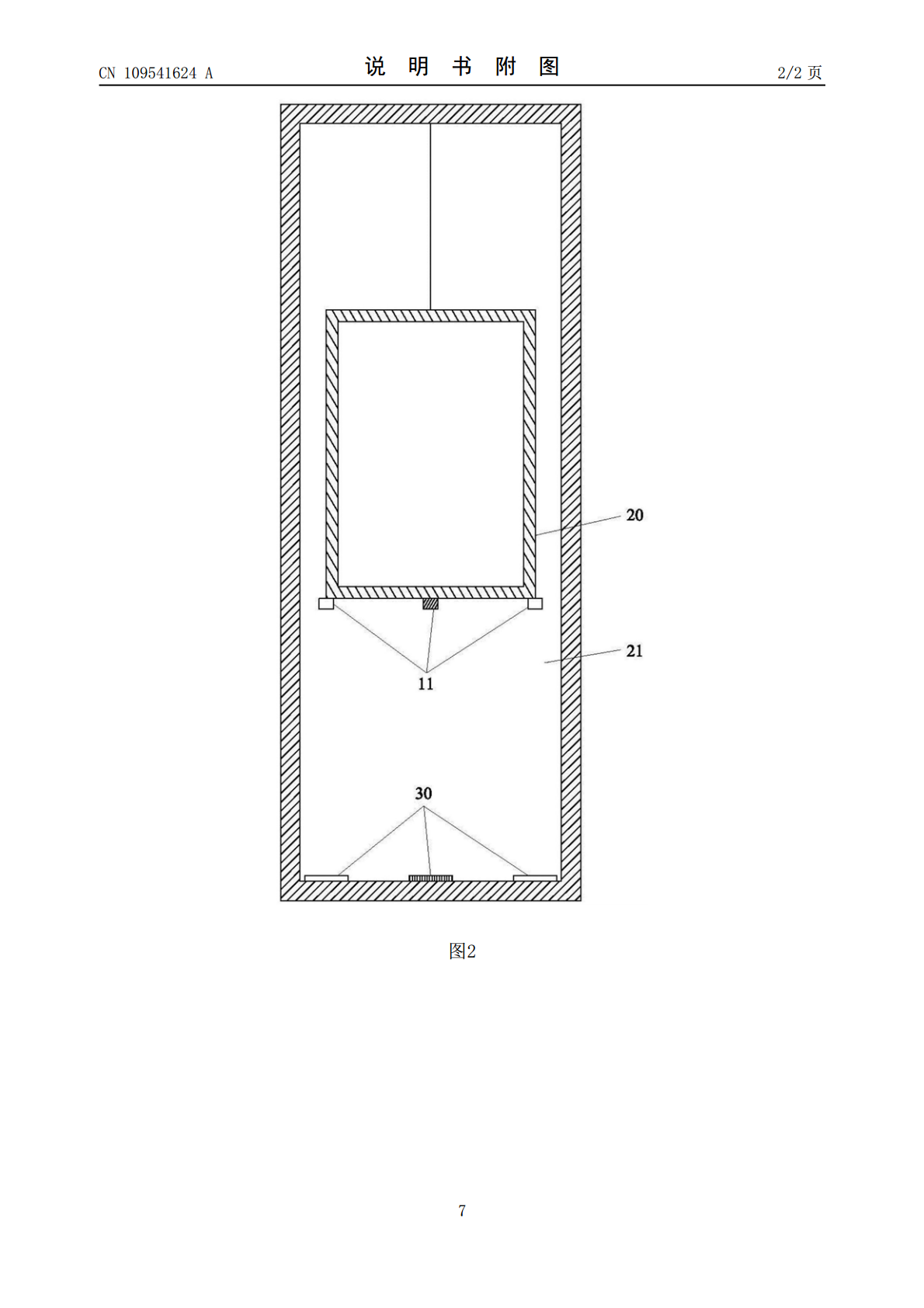
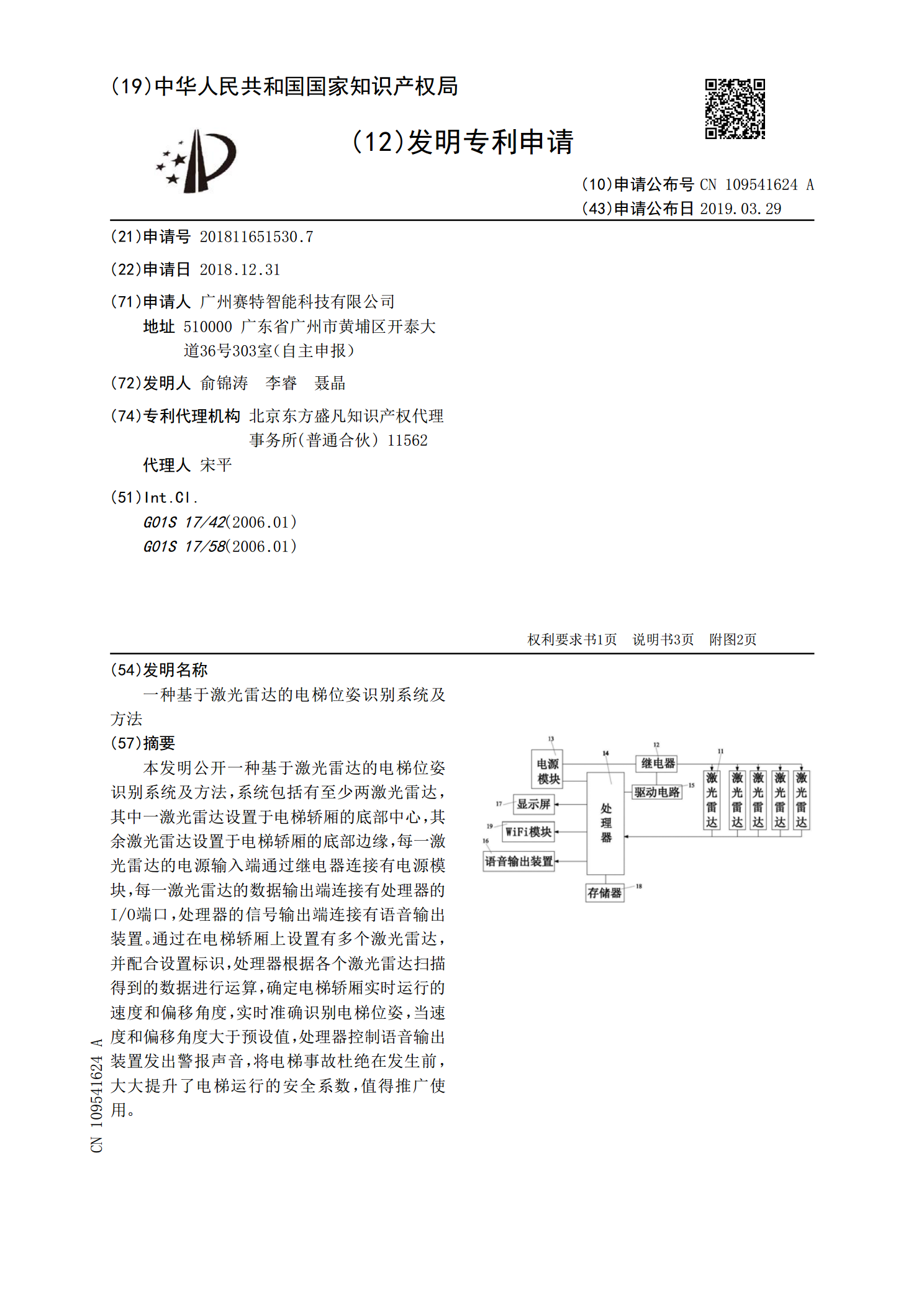
本发明公开一种基于激光雷达的电梯位姿识别系统及方法,系统包括有至少两激光雷达,其中一激光雷达设置于电梯轿厢的底部中心,其余激光雷达设置于电梯轿厢的底部边缘,每一激光雷达的电源输入端通过继电器连接有电源模块,每一激光雷达的数据输出端连接有处理器的I/O端口,处理器的信号输出端连接有语音输出装置。通过在电梯轿厢上设置有多个激光雷达,并配合设置标识,处理器根据各个激光雷达扫描得到的数据进行运算,确定电梯轿厢实时运行的速度和偏移角度,实时准确识别电梯位姿,当速度和偏移角度大于预设值,处理器控制语音输出装置发出警报
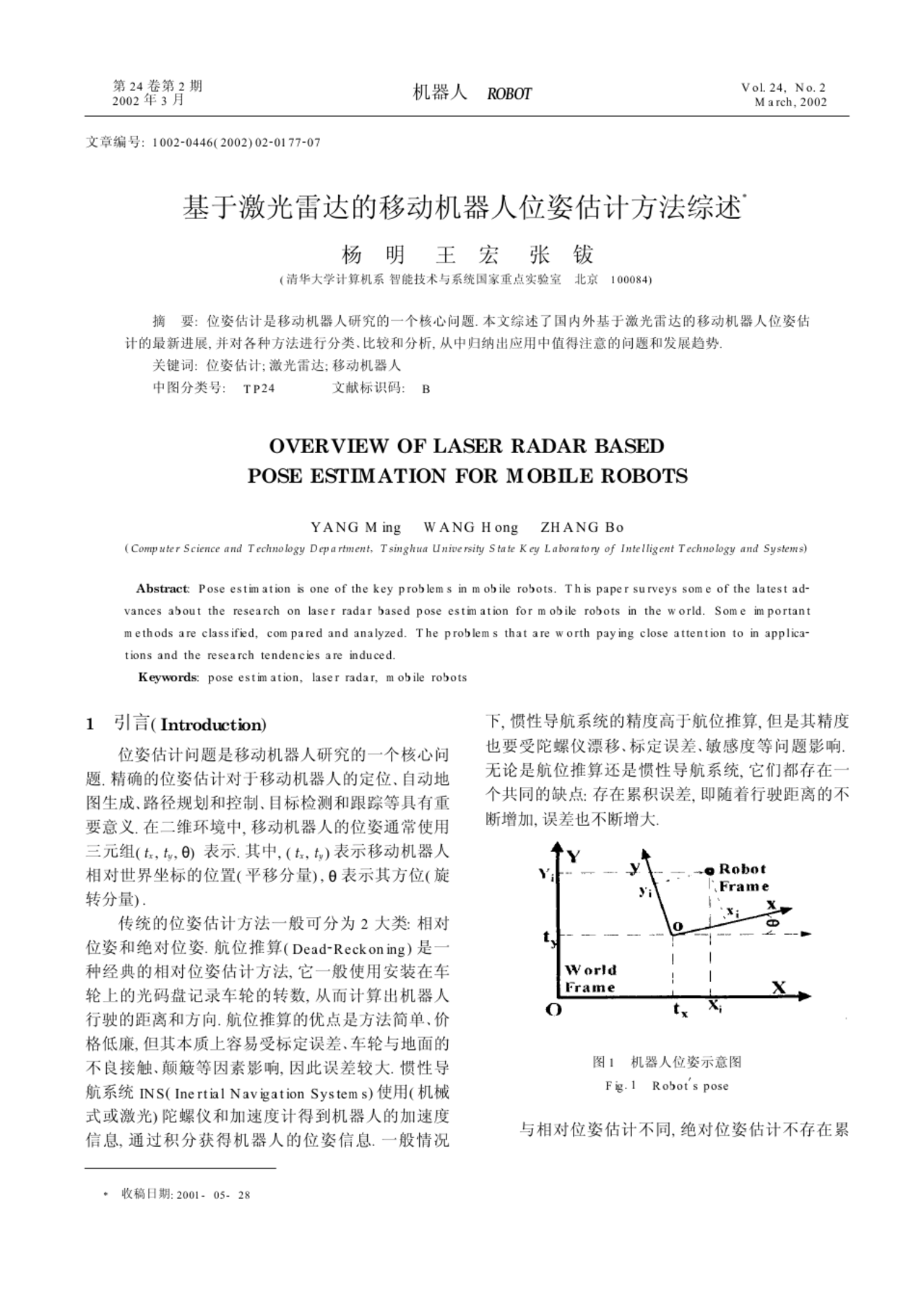
基于激光雷达的移动机器人位姿估计方法综述.pdf
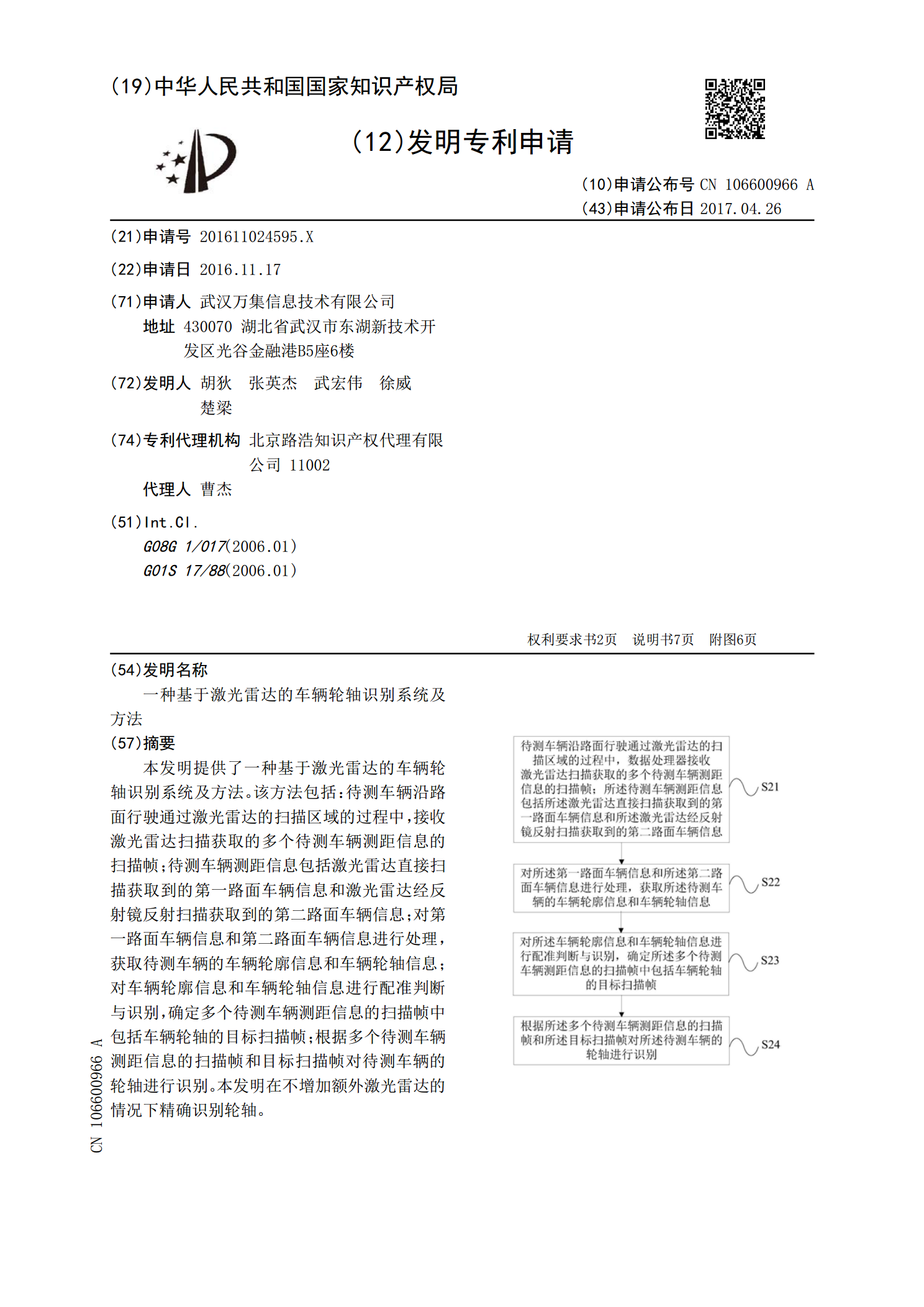
一种基于激光雷达的车辆轮轴识别系统及方法.pdf
本发明提供了一种基于激光雷达的车辆轮轴识别系统及方法。该方法包括:待测车辆沿路面行驶通过激光雷达的扫描区域的过程中,接收激光雷达扫描获取的多个待测车辆测距信息的扫描帧;待测车辆测距信息包括激光雷达直接扫描获取到的第一路面车辆信息和激光雷达经反射镜反射扫描获取到的第二路面车辆信息;对第一路面车辆信息和第二路面车辆信息进行处理,获取待测车辆的车辆轮廓信息和车辆轮轴信息;对车辆轮廓信息和车辆轮轴信息进行配准判断与识别,确定多个待测车辆测距信息的扫描帧中包括车辆轮轴的目标扫描帧;根据多个待测车辆测距信息的扫描帧和
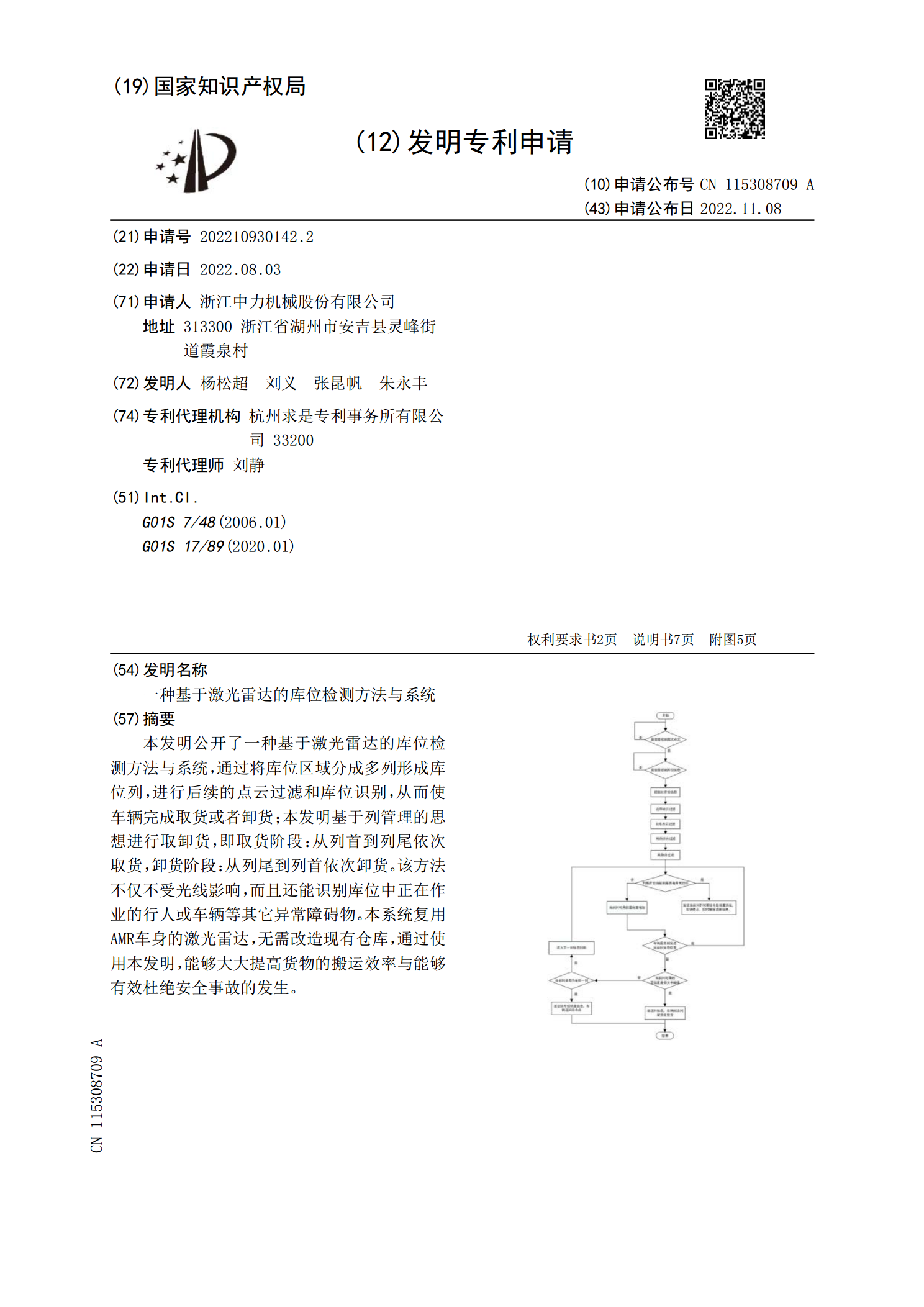
一种基于激光雷达的库位检测方法与系统.pdf
本发明公开了一种基于激光雷达的库位检测方法与系统,通过将库位区域分成多列形成库位列,进行后续的点云过滤和库位识别,从而使车辆完成取货或者卸货;本发明基于列管理的思想进行取卸货,即取货阶段:从列首到列尾依次取货,卸货阶段:从列尾到列首依次卸货。该方法不仅不受光线影响,而且还能识别库位中正在作业的行人或车辆等其它异常障碍物。本系统复用AMR车身的激光雷达,无需改造现有仓库,通过使用本发明,能够大大提高货物的搬运效率与能够有效杜绝安全事故的发生。
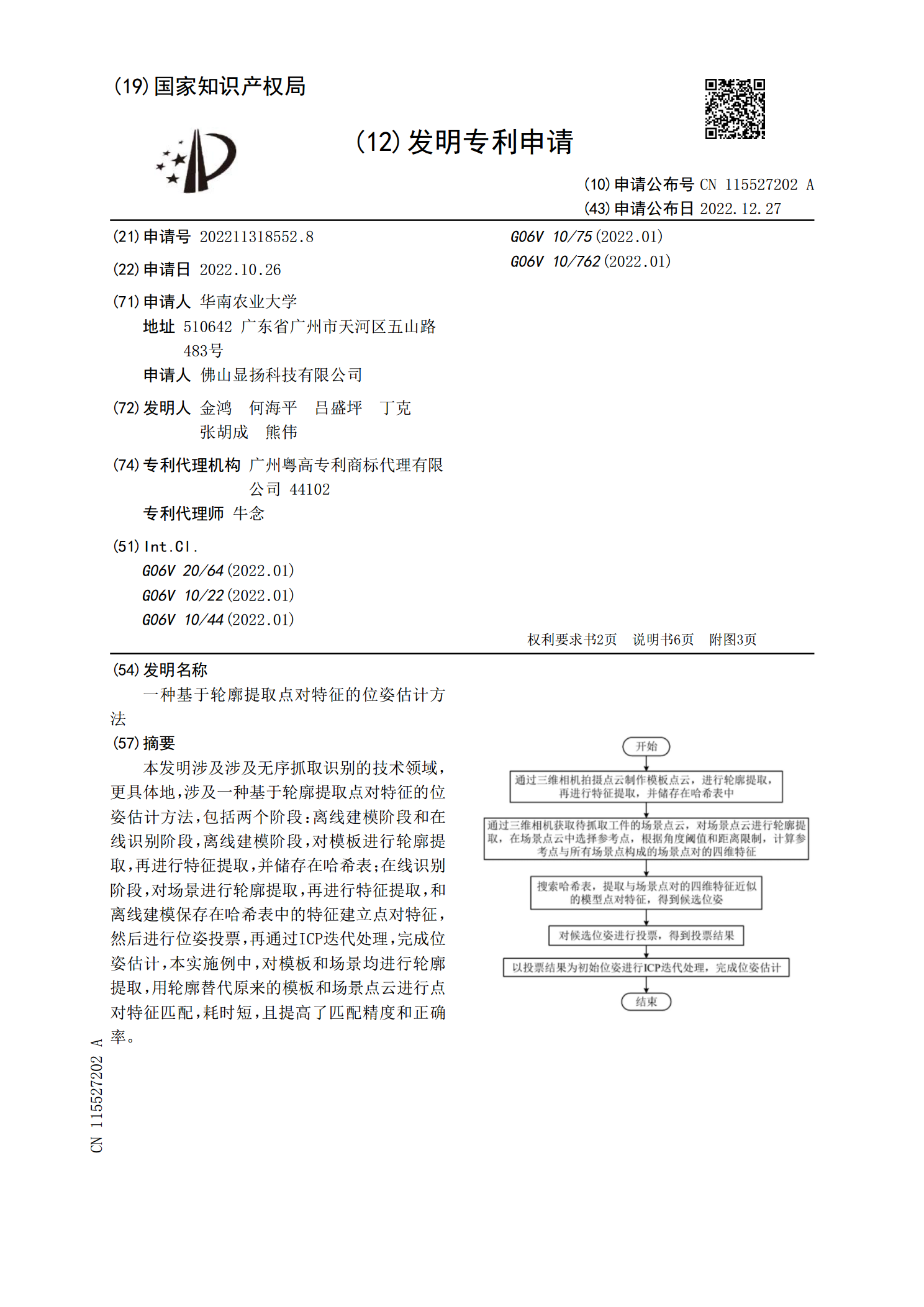
一种基于轮廓提取点对特征的位姿估计方法.pdf
本发明涉及涉及无序抓取识别的技术领域,更具体地,涉及一种基于轮廓提取点对特征的位姿估计方法,包括两个阶段:离线建模阶段和在线识别阶段,离线建模阶段,对模板进行轮廓提取,再进行特征提取,并储存在哈希表;在线识别阶段,对场景进行轮廓提取,再进行特征提取,和离线建模保存在哈希表中的特征建立点对特征,然后进行位姿投票,再通过ICP迭代处理,完成位姿估计,本实施例中,对模板和场景均进行轮廓提取,用轮廓替代原来的模板和场景点云进行点对特征匹配,耗时短,且提高了匹配精度和正确率。