
一种全向运动的机器人传动履带.pdf

一吃****海逸


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种全向运动的机器人传动履带.pdf
一种全向运动的机器人传动履带,包括多个外链节组件(1)和多个滚轮组件(3);所述外链节组件(1)包括两个外链板(102)、两个销轴(101);所述滚轮组件(3)包括一滚轮(303),所述滚轮(303)安装在一滚轮轴(304)上,所述滚轮(303)可绕所述滚轮轴(304)自身旋转;所述滚轮轴(304)固定在滚轮固定架(305)上;所述滚轮固定架(305)固定在内链板(309)上;任一所述外链节组件(1)的两个销轴(101)分别与相邻两个滚轮组件(3)的内链板(309)连接;所述滚轮轴(304)与所述销轴(1

一种全向运动的传动履带.pdf
一种全向运动的传动履带,包括多个外链节组件(1)和多个滚轮组件(2);所述外链节组件(1)包括两个外链板(102)和两个销轴(101);所述滚轮组件(2)包括两个滚轮(201),所述滚轮(201)为内部中空的椭球形;每个所述滚轮(201)安装在一滚轮轴(204)上,所述滚轮(201)可绕所述滚轮轴(204)自身旋转;所述滚轮轴固定在一滚轮固定架(203)上,所述滚轮固定架(203)固定在内链板(206)上;任一所述外链节组件(1)的两个销轴(101)分别与相邻两个滚轮组件(2)的内链板(206)连接。安装

一种履带式全向移动机器人.pdf
本发明公开了一种履带式全向移动机器人,包括主体底板、主体外壳、电池单元、控制单元、通信单元、电机驱动单元和履带单元;所述的履带单元由转轴、履带、履带轮固定板、履带支架、驱动电机、减速器、测速编码器组成;主体底板采用铝合金结构,主体底板上方承载机器人本体的设备,包含电池单元、控制单元、通信单元以及电机驱动单元;主体底板下方为4个履带单元,每个履带单元构成一组转向结构,通过轴承座与角接触轴承安装在机器人主体底板下方;履带单元可绕偏转轴±90°偏转,偏转角由角度传感器测量,角度传感器通过角度传感器支架固定在主体

一种新型全向运动球形机器人.pdf
本发明涉及一种新型全向运动球形机器人,包括外壳,内部结构、控制装置和检测设备。外壳用于在地面上滚动前行;内部结构底部装置驱动轮,依靠电机实现驱动轮转动,驱动轮转动与球形外壳之间有摩擦力,在摩擦力的作用下,使球形外壳运动;内部结构两侧有转向轮,在电机的驱动下,带动机器人实现转动;控制和检测装置安装在内部结构上,控制装置和两个电机连接控制球形机器人的运动与转动,而且为机器人提供所需的电能,本发明通过两个电机作用在不同的位置,通过电机的转矩,利用驱动轮和外壳、转动轮和外壳之间的摩擦力实现整个球形机器人的运动,因
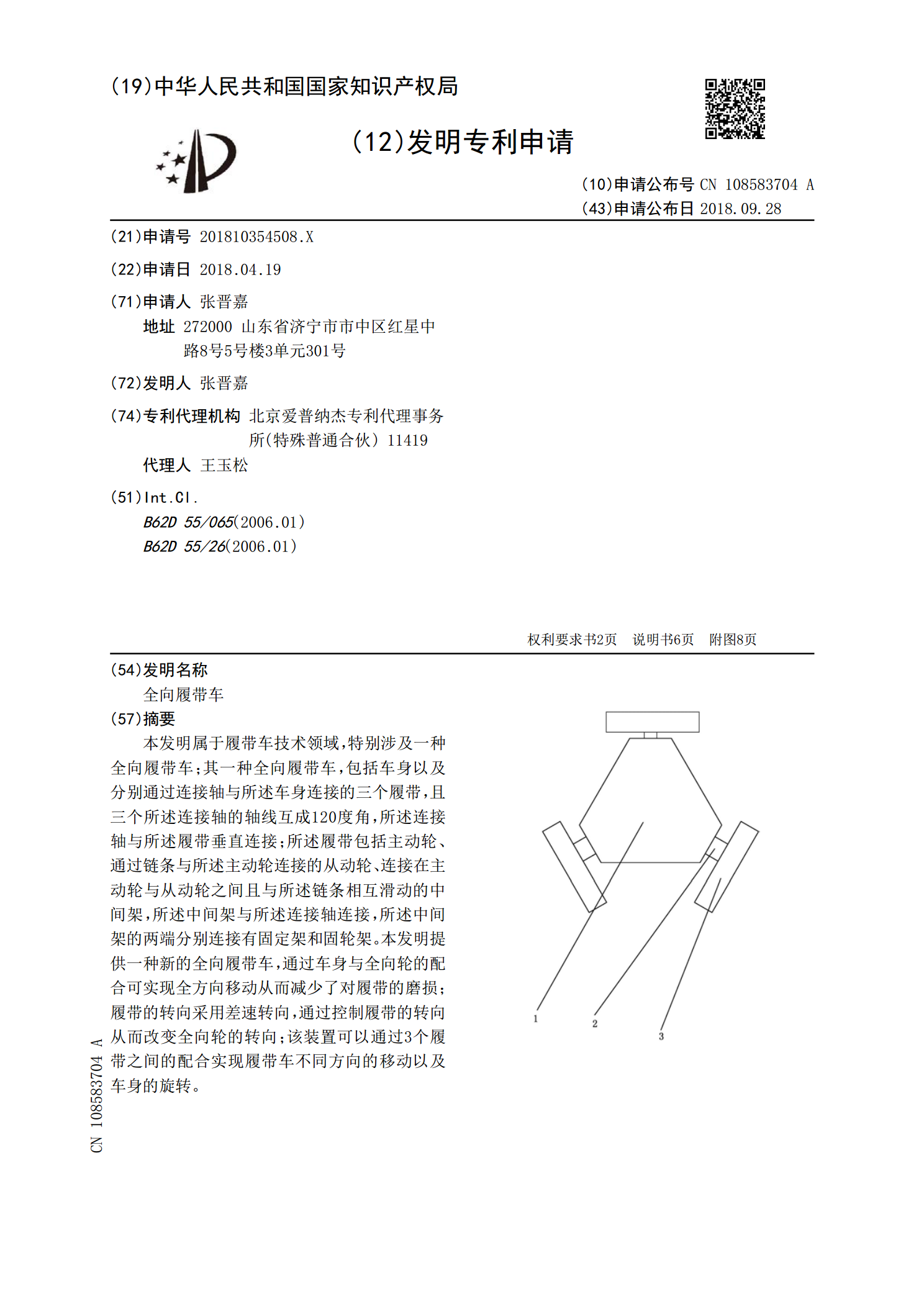
全向履带车.pdf
本发明属于履带车技术领域,特别涉及一种全向履带车;其一种全向履带车,包括车身以及分别通过连接轴与所述车身连接的三个履带,且三个所述连接轴的轴线互成120度角,所述连接轴与所述履带垂直连接;所述履带包括主动轮、通过链条与所述主动轮连接的从动轮、连接在主动轮与从动轮之间且与所述链条相互滑动的中间架,所述中间架与所述连接轴连接,所述中间架的两端分别连接有固定架和固轮架。本发明提供一种新的全向履带车,通过车身与全向轮的配合可实现全方向移动从而减少了对履带的磨损;履带的转向采用差速转向,通过控制履带的转向从而改变全