
一种履带式全向移动机器人.pdf

Th****s3


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种履带式全向移动机器人.pdf
本发明公开了一种履带式全向移动机器人,包括主体底板、主体外壳、电池单元、控制单元、通信单元、电机驱动单元和履带单元;所述的履带单元由转轴、履带、履带轮固定板、履带支架、驱动电机、减速器、测速编码器组成;主体底板采用铝合金结构,主体底板上方承载机器人本体的设备,包含电池单元、控制单元、通信单元以及电机驱动单元;主体底板下方为4个履带单元,每个履带单元构成一组转向结构,通过轴承座与角接触轴承安装在机器人主体底板下方;履带单元可绕偏转轴±90°偏转,偏转角由角度传感器测量,角度传感器通过角度传感器支架固定在主体
一种全向移动平台及全向移动机器人.pdf
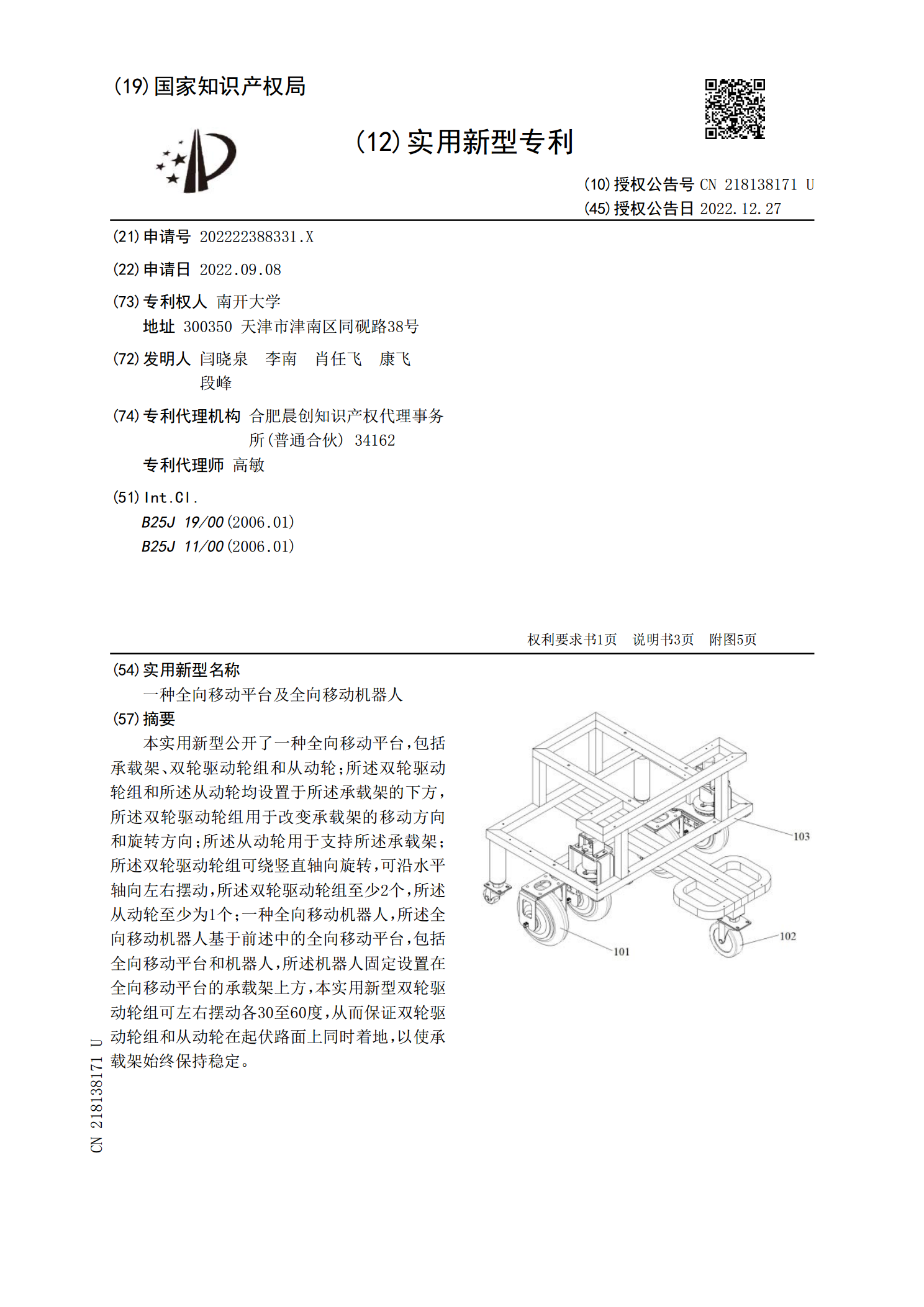
本实用新型公开了一种全向移动平台,包括承载架、双轮驱动轮组和从动轮;所述双轮驱动轮组和所述从动轮均设置于所述承载架的下方,所述双轮驱动轮组用于改变承载架的移动方向和旋转方向;所述从动轮用于支持所述承载架;所述双轮驱动轮组可绕竖直轴向旋转,可沿水平轴向左右摆动,所述双轮驱动轮组至少2个,所述从动轮至少为1个;一种全向移动机器人,所述全向移动机器人基于前述中的全向移动平台,包括全向移动平台和机器人,所述机器人固定设置在全向移动平台的承载架上方,本实用新型双轮驱动轮组可左右摆动各30至60度,从而保证双轮驱动轮
一种多履带式全向移动平台.pdf
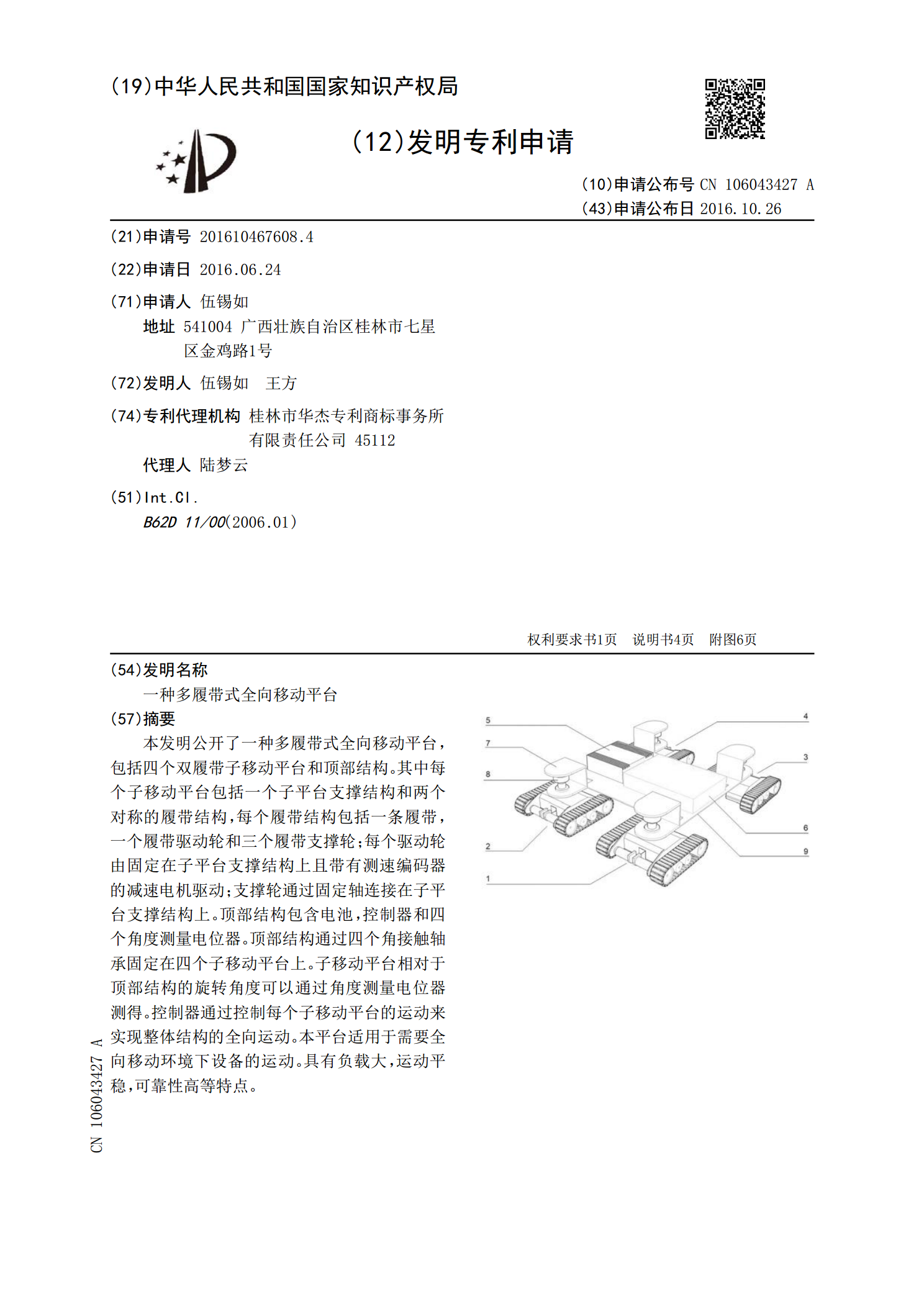
本发明公开了一种多履带式全向移动平台,包括四个双履带子移动平台和顶部结构。其中每个子移动平台包括一个子平台支撑结构和两个对称的履带结构,每个履带结构包括一条履带,一个履带驱动轮和三个履带支撑轮;每个驱动轮由固定在子平台支撑结构上且带有测速编码器的减速电机驱动;支撑轮通过固定轴连接在子平台支撑结构上。顶部结构包含电池,控制器和四个角度测量电位器。顶部结构通过四个角接触轴承固定在四个子移动平台上。子移动平台相对于顶部结构的旋转角度可以通过角度测量电位器测得。控制器通过控制每个子移动平台的运动来实现整体结构的全

一种全向移动机器人.pdf
本发明提供了一种全向移动机器人,包括车体、麦克纳姆轮部件、电控系统、电源系统、调姿平台、机械臂和双目视觉系统,四个麦克纳姆轮部件分别固定安装至车体的四角,电控系统和电源系统安装至车体内部,实现两个自由度方向调整的调姿平台固定安装至车体上,实现六自由度操控的机械臂固定安装至调姿平台的斜支撑平台,双目视觉系统固定安装至车体。本发明依靠机械臂+车身自动导航+双目视觉系统实现全向移动自动焊接功能的结构形式,这种结构可以适应全向移动自动(焊接、搬运、涂胶、装配等)需求。

一种智能全向移动机器人.pdf
本发明创造公开了一种智能全向移动机器人,包括圆形顶层板、圆形中层板、圆形底层板、上侧外围板、下侧外围板、控制器、无线通信模块、电源模块、蓄电池、电机驱动模块、激光传感器、超声波传感器、PSD传感器、操作面板、摄像头、三个驱动电机以及三个全向轮。该智能全向移动机器人利用各个传感器采集外部信号,由控制器相互协调实现机器人的全向移动、自主避障以及语音控制等功能,具有稳定性高、可靠性好,能够适应多种环境,自主智能避障运行,能够进行语音操控,可以广泛应用于智能物流系统中。