
一种纯电动车辆的扭矩回收控制方法及控制系统.pdf

一吃****天材


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种纯电动车辆的扭矩回收控制方法及控制系统.pdf
本发明公开了一种纯电动车辆的扭矩回收控制方法及控制系统,该方法包括:根据车辆当前行驶参数计算当前允许回收的目标扭矩,并获取当前实际请求扭矩,预设不引起车辆抱死的最大回收扭矩;当车辆防抱死系统ABS被激活且车辆的制动踏板未被踩下时,根据当前允许回收的目标扭矩的绝对值与最大回收标定扭矩的绝对值的大小判定,确定是按照快速滤波梯度还是按照常规滤波梯度进行滤波。本方法通过控制不同的滤波梯度使车辆在ABS介入前后能够实现平稳过渡,实现车辆在低附着系数路面滑行时,保证车辆具备相应的回收扭矩的同时不会引起车辆车轮抱死。同

一种纯电动车辆扭矩控制方法及系统.pdf
本发明涉及一种纯电动车辆扭矩控制方法及系统,属于纯电动汽车整车技术领域。本发明车辆在制动过程中,实时估算车轮当前滑移率,判断车轮当前滑移率是否大于滑移率设定值,若大于,则控制电机制动扭矩降低,滑移率设定值由防抱死系统ABS工作时的车轮滑移率确定。本发明通过估算车轮当前滑移率,根据车轮当前滑移率控制电机制动扭矩降低,在ABS作用前提前进行扭矩控制,有效减小了车辆制动时ABS触发概率,同时能改善电制动撤离引起的制动过程不平顺。

一种纯电动车辆爬坡扭矩估算方法和控制方法及其系统.pdf
本发明涉及纯电动汽车控制技术领域,特别是一种纯电动车辆爬坡扭矩估算方法和控制方法及其系统。该估算方法通过获取路面坡度信息和车辆状态信息,并通过对比当前车速和设定车速确定车辆需要优先满足爬坡性能还是加速性能,再结合当前车辆状态、路面坡度和动力性需求输出相应的实际输出驱动扭矩,根据实时的路况信息和车辆状态输出优化的驱动扭矩,从而减少了车辆的能耗和动力过剩,同时,满足了车辆的动力性需求,该控制方法根据路面坡度控制车辆采取后两轮的扭矩输出或四轮的扭矩输出,降低单电机输出的压力,避免了电机长时间过载运行,提高了车辆
一种分布式驱动的纯电动车辆爬坡扭矩控制方法及系统.pdf
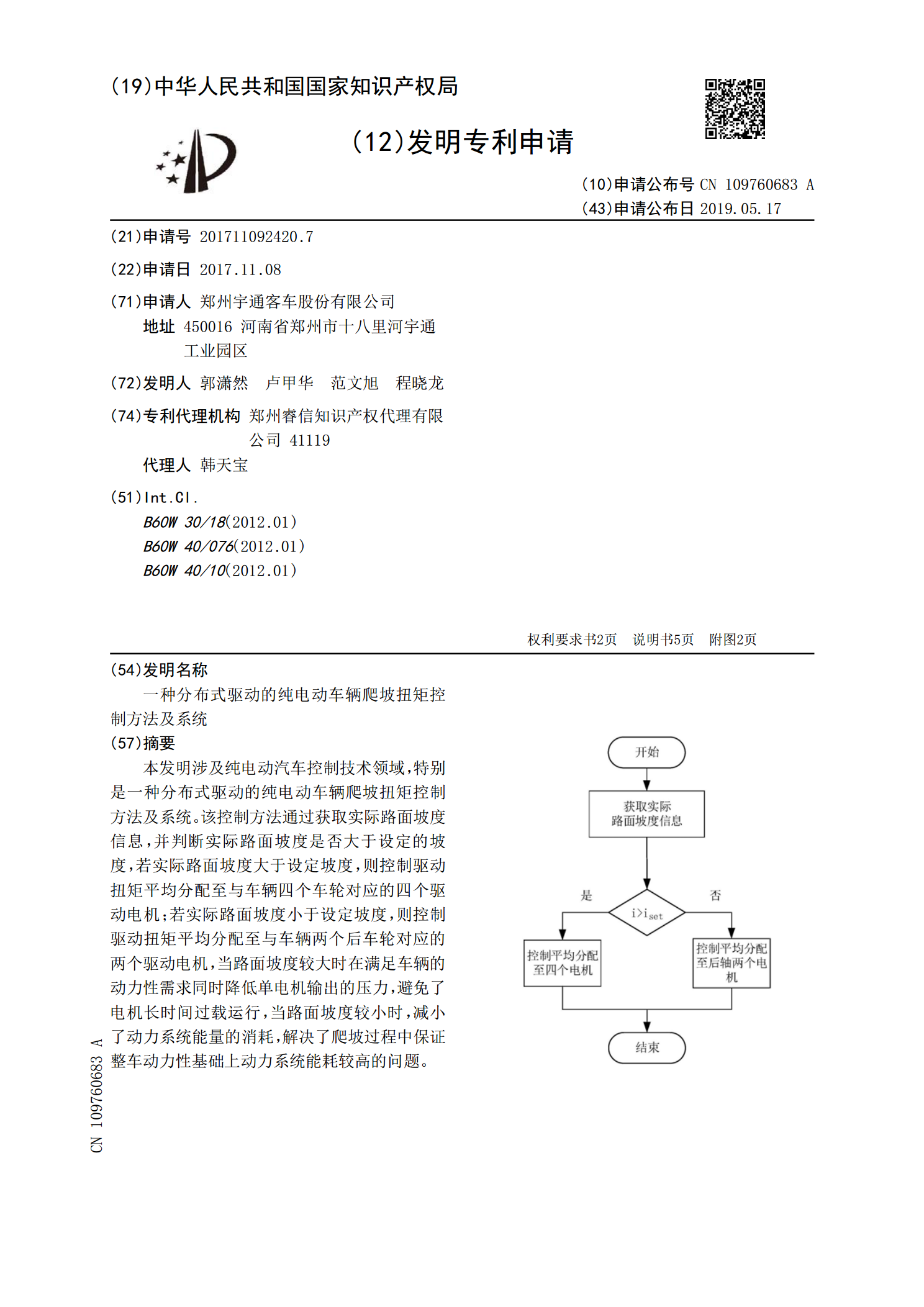
本发明涉及纯电动汽车控制技术领域,特别是一种分布式驱动的纯电动车辆爬坡扭矩控制方法及系统。该控制方法通过获取实际路面坡度信息,并判断实际路面坡度是否大于设定的坡度,若实际路面坡度大于设定坡度,则控制驱动扭矩平均分配至与车辆四个车轮对应的四个驱动电机;若实际路面坡度小于设定坡度,则控制驱动扭矩平均分配至与车辆两个后车轮对应的两个驱动电机,当路面坡度较大时在满足车辆的动力性需求同时降低单电机输出的压力,避免了电机长时间过载运行,当路面坡度较小时,减小了动力系统能量的消耗,解决了爬坡过程中保证整车动力性基础上动
轮毂四驱纯电动汽车扭矩矢量控制系统及控制方法.pdf
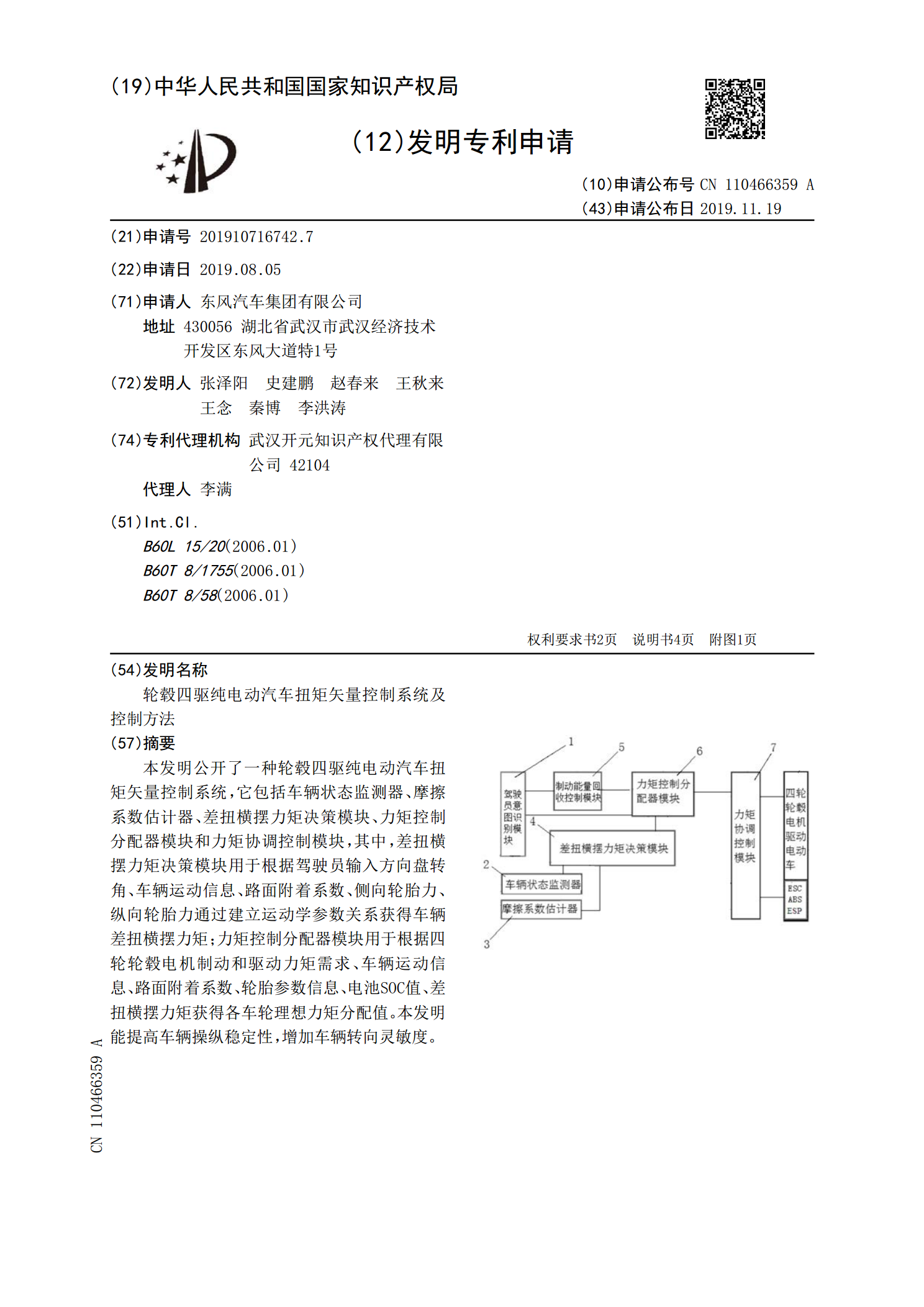
本发明公开了一种轮毂四驱纯电动汽车扭矩矢量控制系统,它包括车辆状态监测器、摩擦系数估计器、差扭横摆力矩决策模块、力矩控制分配器模块和力矩协调控制模块,其中,差扭横摆力矩决策模块用于根据驾驶员输入方向盘转角、车辆运动信息、路面附着系数、侧向轮胎力、纵向轮胎力通过建立运动学参数关系获得车辆差扭横摆力矩;力矩控制分配器模块用于根据四轮轮毂电机制动和驱动力矩需求、车辆运动信息、路面附着系数、轮胎参数信息、电池SOC值、差扭横摆力矩获得各车轮理想力矩分配值。本发明能提高车辆操纵稳定性,增加车辆转向灵敏度。