
双差速驱动AGV转向运动的控制系统.pdf

Jo****34


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双差速驱动AGV转向运动的控制系统.pdf
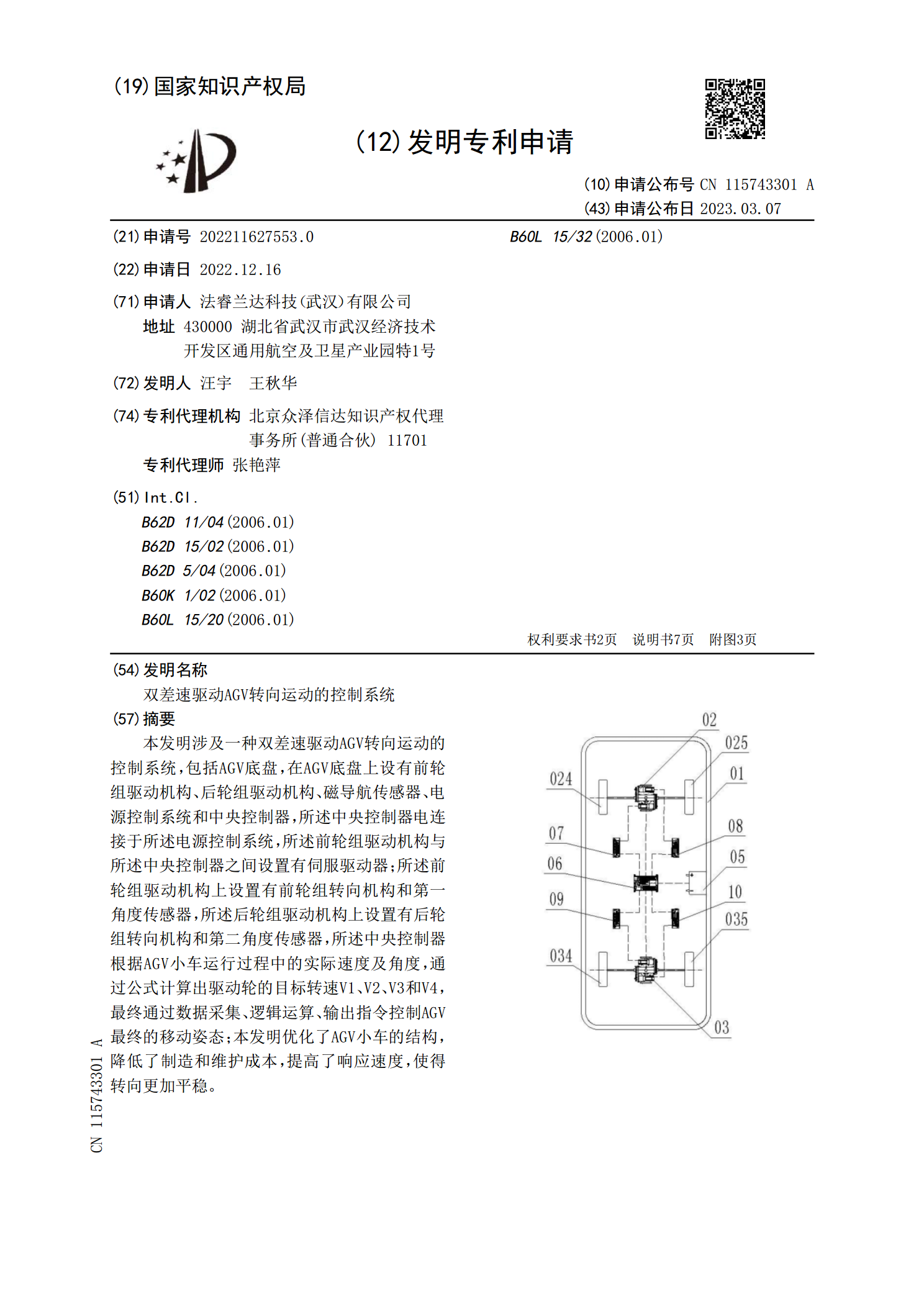
本发明涉及一种双差速驱动AGV转向运动的控制系统,包括AGV底盘,在AGV底盘上设有前轮组驱动机构、后轮组驱动机构、磁导航传感器、电源控制系统和中央控制器,所述中央控制器电连接于所述电源控制系统,所述前轮组驱动机构与所述中央控制器之间设置有伺服驱动器;所述前轮组驱动机构上设置有前轮组转向机构和第一角度传感器,所述后轮组驱动机构上设置有后轮组转向机构和第二角度传感器,所述中央控制器根据AGV小车运行过程中的实际速度及角度,通过公式计算出驱动轮的目标转速V1、V2、V3和V4,最终通过数据采集、逻辑运算、输出

差速驱动式AGV控制系统及自动循迹方法.pdf
为了对差速驱动式AGV建立一个完整的控制系统,以实现AGV对路径的可靠跟踪,本发明提供了一种差速驱动式AGV控制系统及自动循迹方法,其中系统包括轨迹检测装置和控制器;控制器包括数据处理模块、数据收发模块和控制模块;数据处理模块包括左右轮差速比获取模块和左右轮速度获取模块;轨迹检测装置的输入端与AGV的驱动部件相连,输出端与所述左右轮差速比获取模块的输入端相连;左右轮差速比获取模块的输出端和数据收发模块的输出端均与所述左右轮速度获取模块的输入端相连;左右轮速度获取模块的输出端与所述控制模块的输入端相连;控制
双轮差速转向驱动轮.pdf
本发明双轮差速转向驱动轮,包括双轮差速驱动轮和与双轮差速驱动轮对应设置且相配合使用的驱动轮转盘组件;双轮差速驱动轮包括电机及支架组件、对称设置于电机及支架组件两侧的且均与电机及支架组件配合使用的单侧驱动轮组件和单侧随动轮组件,电机及支架组件连接有减速箱组件,减速箱组件与单侧驱动轮组件相对应相配合使用。本发明在电机及支架组件两侧分别安装一个单侧驱动轮和单侧随动轮,使得驱动轮有两个轮子同时承受载荷,提高了驱动轮的承载能力;单侧驱动轮和单侧随动轮位于驱动轮转盘组件中心两侧,在转向时两轮可通过差速旋转,把单轮转向
差速结构的转向驱动桥.pdf
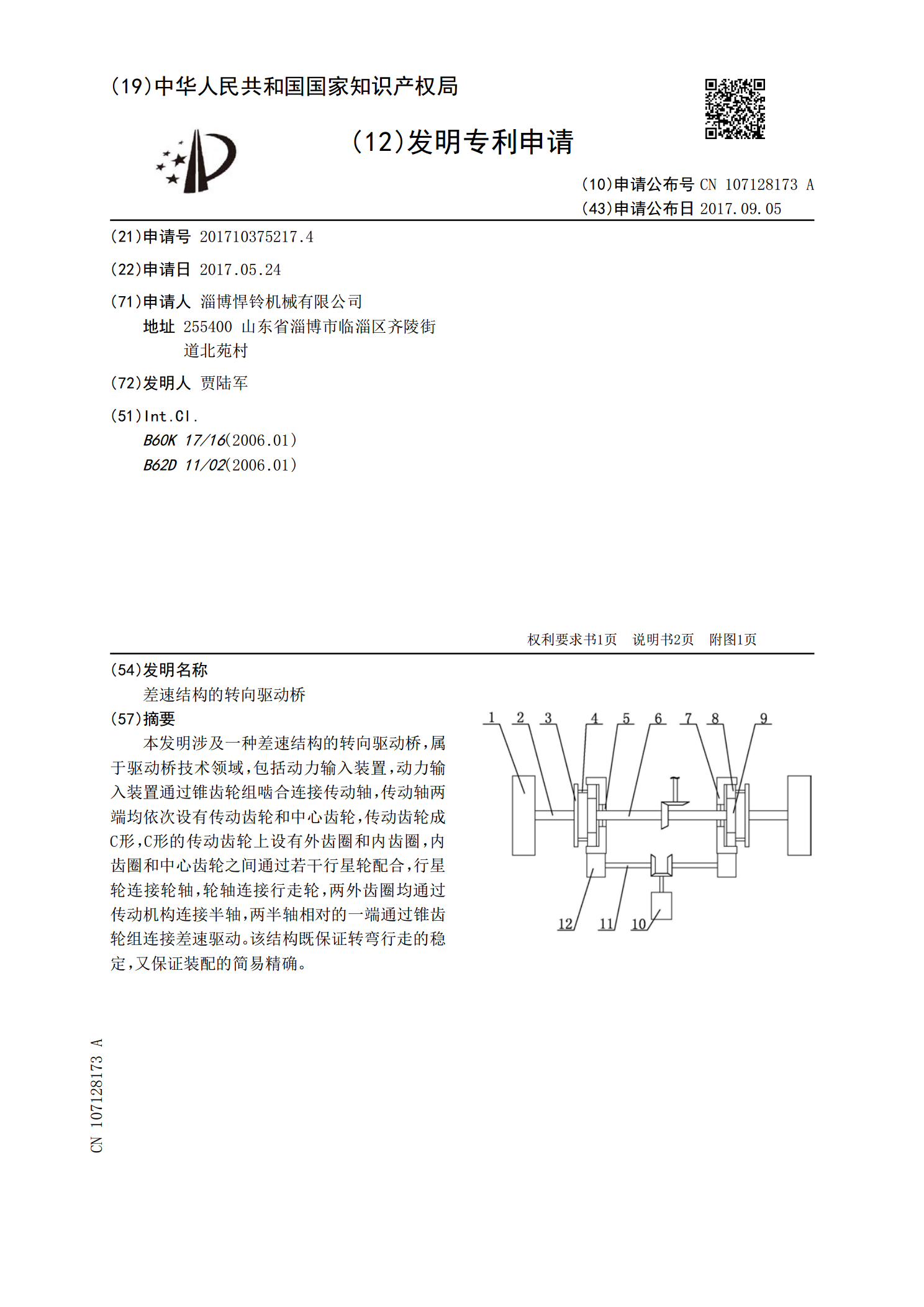
本发明涉及一种差速结构的转向驱动桥,属于驱动桥技术领域,包括动力输入装置,动力输入装置通过锥齿轮组啮合连接传动轴,传动轴两端均依次设有传动齿轮和中心齿轮,传动齿轮成C形,C形的传动齿轮上设有外齿圈和内齿圈,内齿圈和中心齿轮之间通过若干行星轮配合,行星轮连接轮轴,轮轴连接行走轮,两外齿圈均通过传动机构连接半轴,两半轴相对的一端通过锥齿轮组连接差速驱动。该结构既保证转弯行走的稳定,又保证装配的简易精确。

全向差速驱动轮装置及AGV小车.pdf
本发明涉及物流搬运设备领域,尤其是涉及一种全向差速驱动轮装置及应用该装置的AGV小车;该装置包括:固定座、驱动装置、差速器、车轮和转向装置;差速器安装在固定座上,差速器的两输出端分别通过轮轴连接所述车轮;所述驱动装置与所述差速器连接,以提供动力;所述转向装置安装在固定座上,同时,所述转向装置与小车连接,以实现小车全向运动。本装置具有结构简单、成本低,控制难度低的优点。该小车包括上述的全向差速驱动轮装置,具备全向移动的功能,能够提高生产或者存储的效率。