
一种用于线控转向汽车主动前轮转向控制系统的控制方法.pdf

运升****魔王

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于线控转向汽车主动前轮转向控制系统的控制方法.pdf
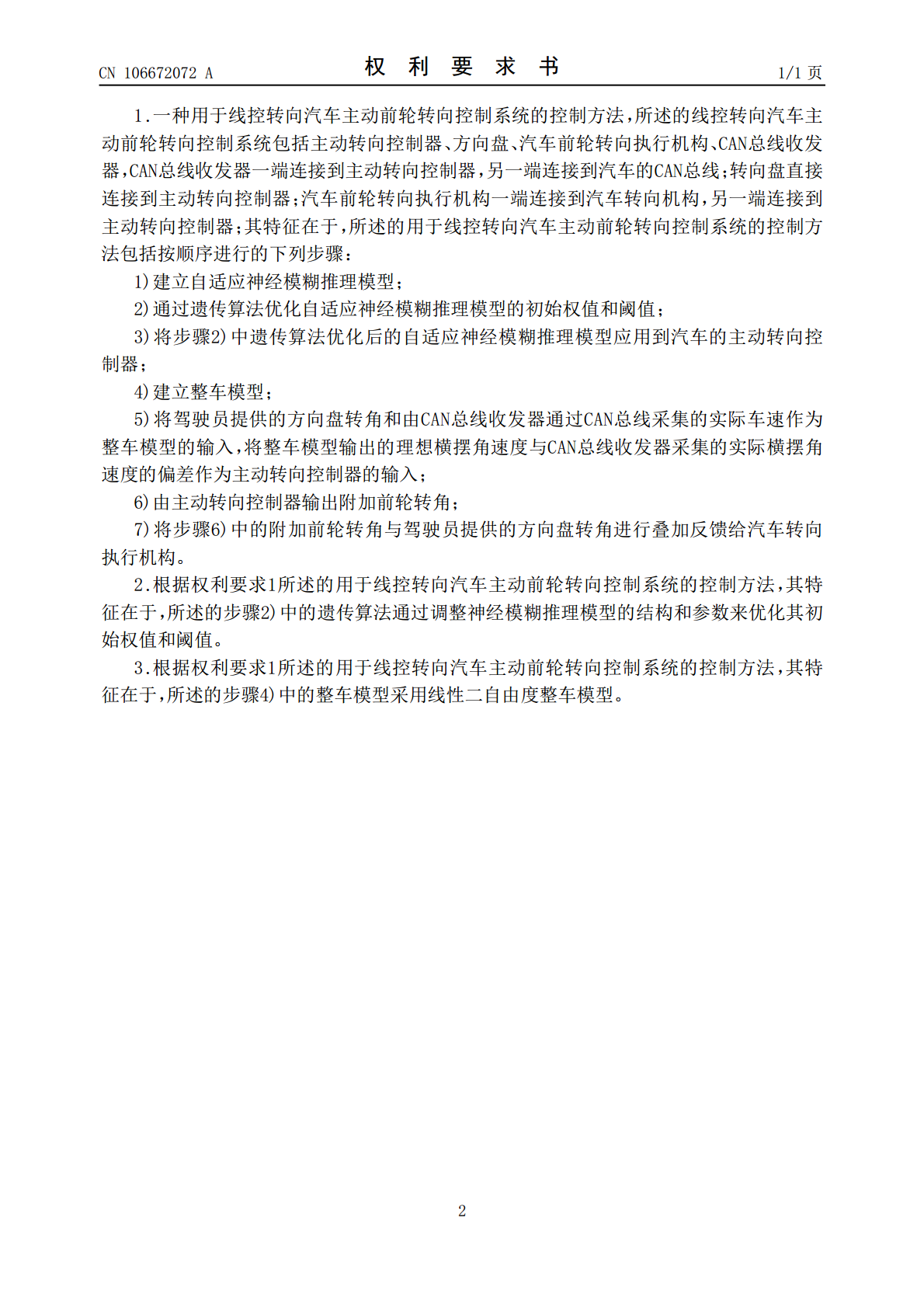
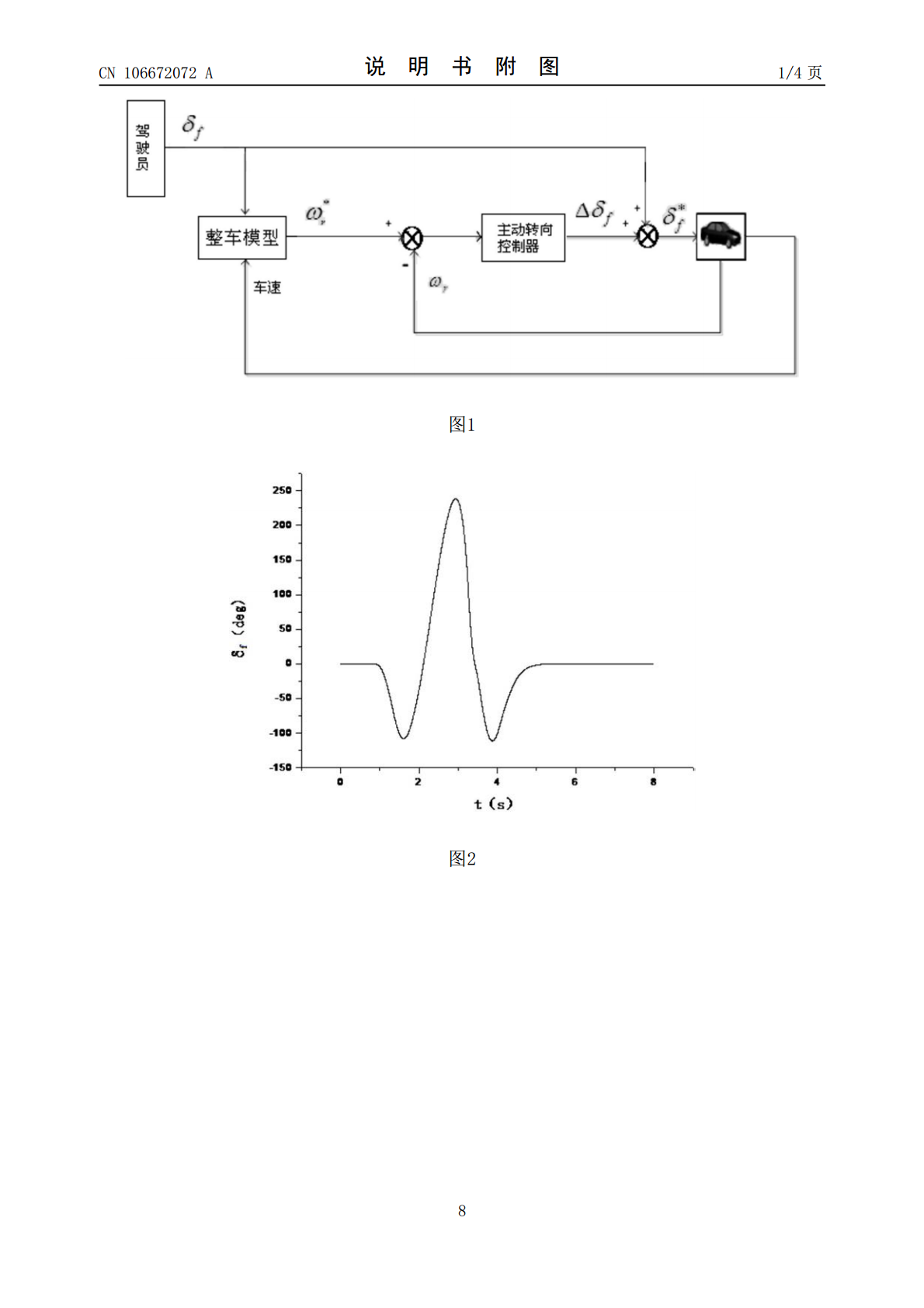
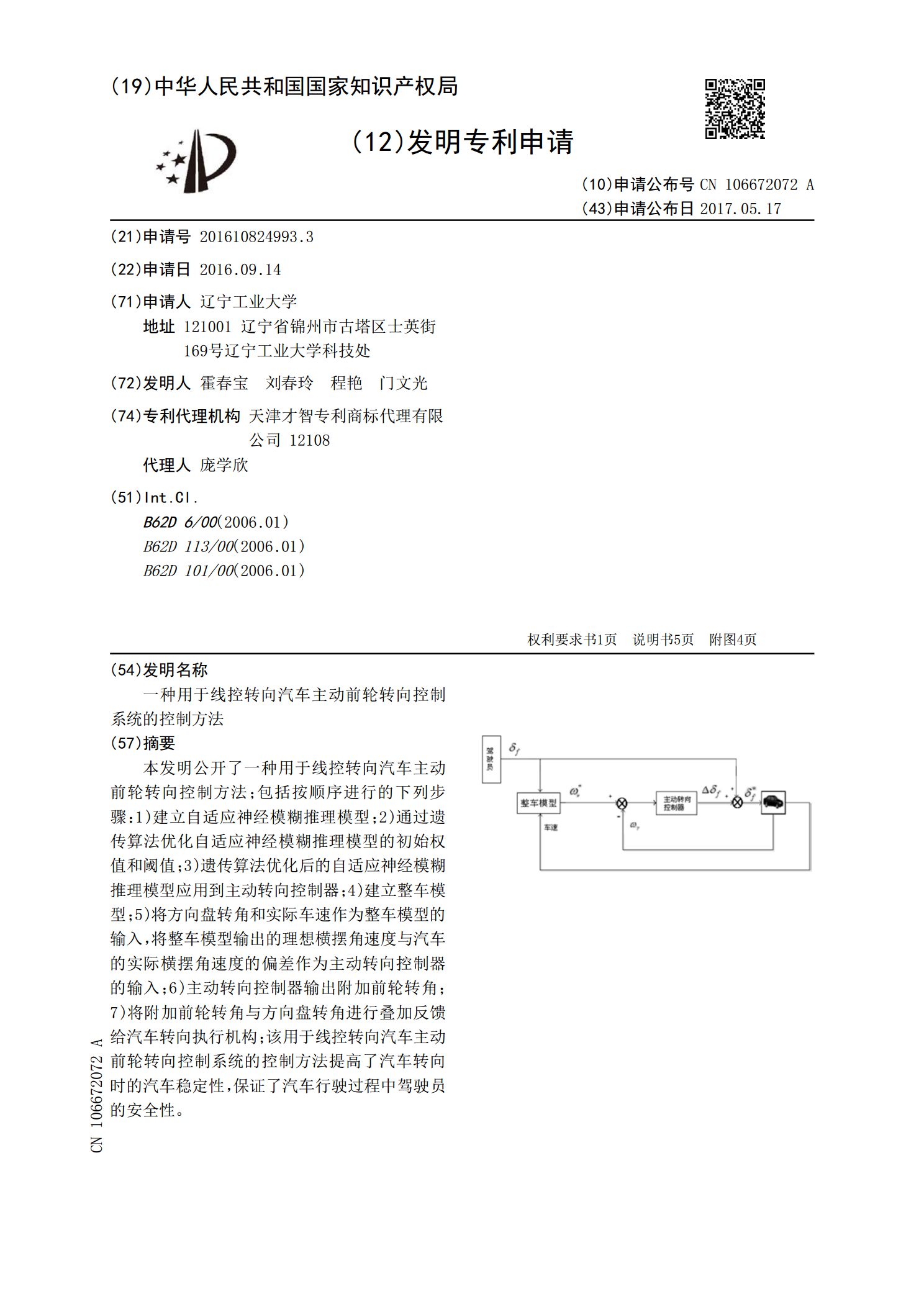
本发明公开了一种用于线控转向汽车主动前轮转向控制方法;包括按顺序进行的下列步骤:1)建立自适应神经模糊推理模型;2)通过遗传算法优化自适应神经模糊推理模型的初始权值和阈值;3)遗传算法优化后的自适应神经模糊推理模型应用到主动转向控制器;4)建立整车模型;5)将方向盘转角和实际车速作为整车模型的输入,将整车模型输出的理想横摆角速度与汽车的实际横摆角速度的偏差作为主动转向控制器的输入;6)主动转向控制器输出附加前轮转角;7)将附加前轮转角与方向盘转角进行叠加反馈给汽车转向执行机构;该用于线控转向汽车主动前轮转

用于汽车线控转向系统的控制方法.pdf
本发明公开了用于汽车线控转向系统的控制方法,步骤:1.线控转向系统初始化;2.检测转向盘的位置是否与转向车轮的位置相对应,如果不是,通过力感模拟电机调节转向盘转角至与小齿轮转角对应的目标转向盘位置;3.检测线控转向系统是否继续工作;4.转向系统及车辆状态采集处理;5.转向盘位置控制器与转向执行电机转矩控制器分别计算β和α;6.转向盘位置控制器根据θp与β计算相应的转向盘目标转角,转向执行电机转矩控制器则根据Ts与α计算转向执行电机的目标电流;7.转向盘位置控制器按照位置控制原理对力感模拟电机进行转角控制;
汽车前轮主动转向系统的主动转向传动装置.pdf
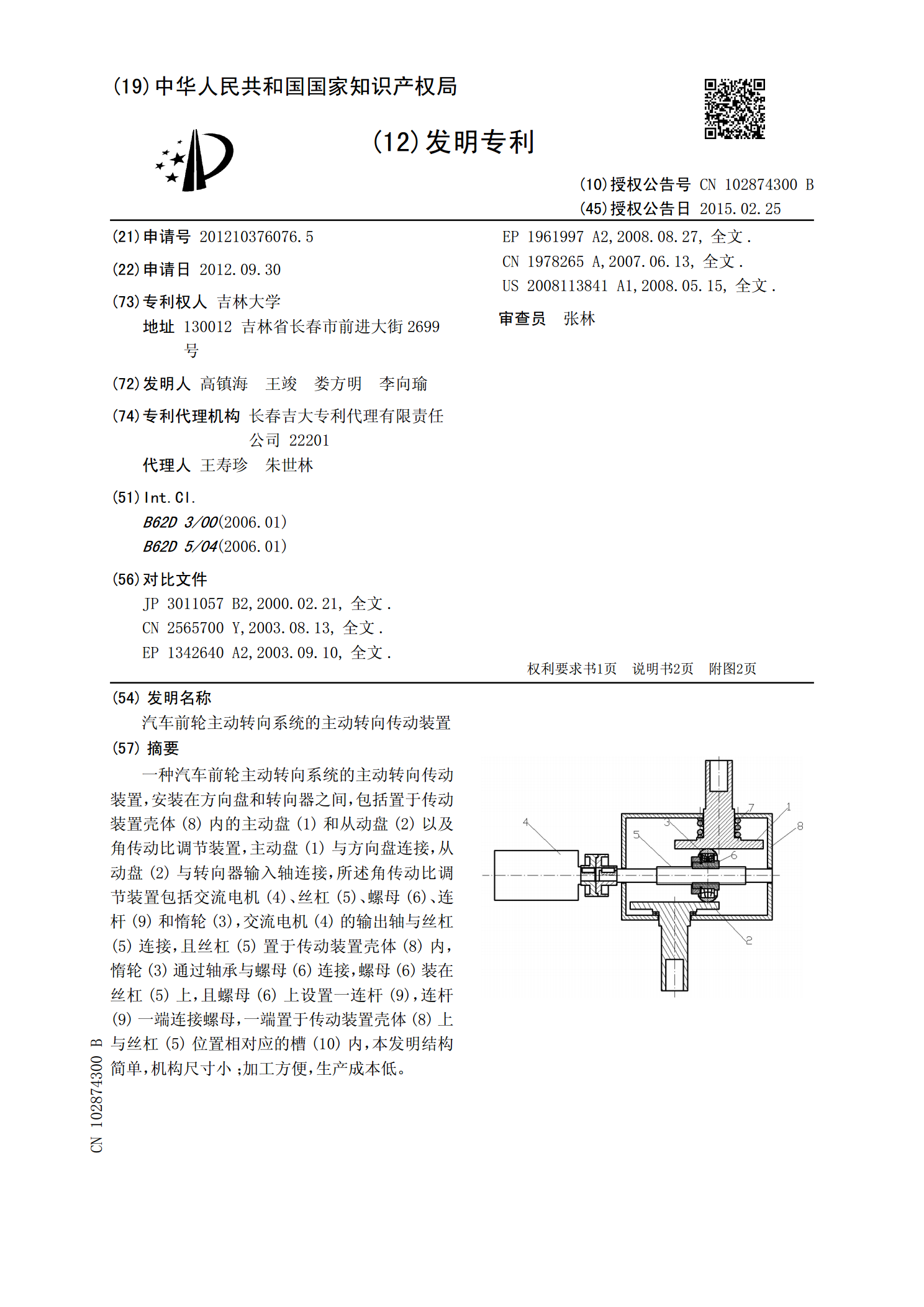
一种汽车前轮主动转向系统的主动转向传动装置,安装在方向盘和转向器之间,包括置于传动装置壳体(8)内的主动盘(1)和从动盘(2)以及角传动比调节装置,主动盘(1)与方向盘连接,从动盘(2)与转向器输入轴连接,所述角传动比调节装置包括交流电机(4)、丝杠(5)、螺母(6)、连杆(9)和惰轮(3),交流电机(4)的输出轴与丝杠(5)连接,且丝杠(5)置于传动装置壳体(8)内,惰轮(3)通过轴承与螺母(6)连接,螺母(6)装在丝杠(5)上,且螺母(6)上设置一连杆(9),连杆(9)一端连接螺母,一端置于传动装置壳
用于线控转向系统的转向控制方法和装置.pdf
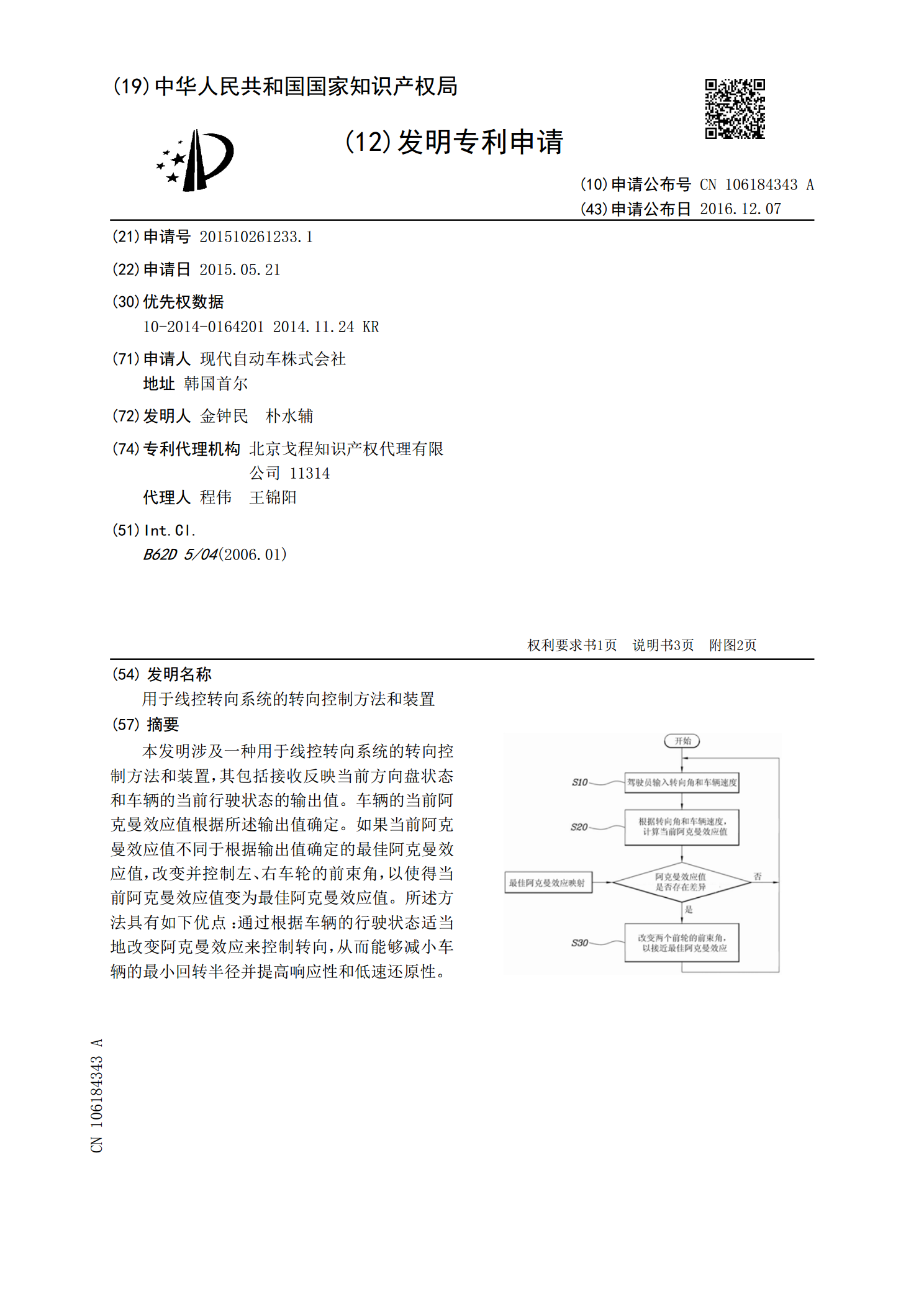
本发明涉及一种用于线控转向系统的转向控制方法和装置,其包括接收反映当前方向盘状态和车辆的当前行驶状态的输出值。车辆的当前阿克曼效应值根据所述输出值确定。如果当前阿克曼效应值不同于根据输出值确定的最佳阿克曼效应值,改变并控制左、右车轮的前束角,以使得当前阿克曼效应值变为最佳阿克曼效应值。所述方法具有如下优点:通过根据车辆的行驶状态适当地改变阿克曼效应来控制转向,从而能够减小车辆的最小回转半径并提高响应性和低速还原性。
一种汽车主动前轮转向系统的容错控制方法.pdf
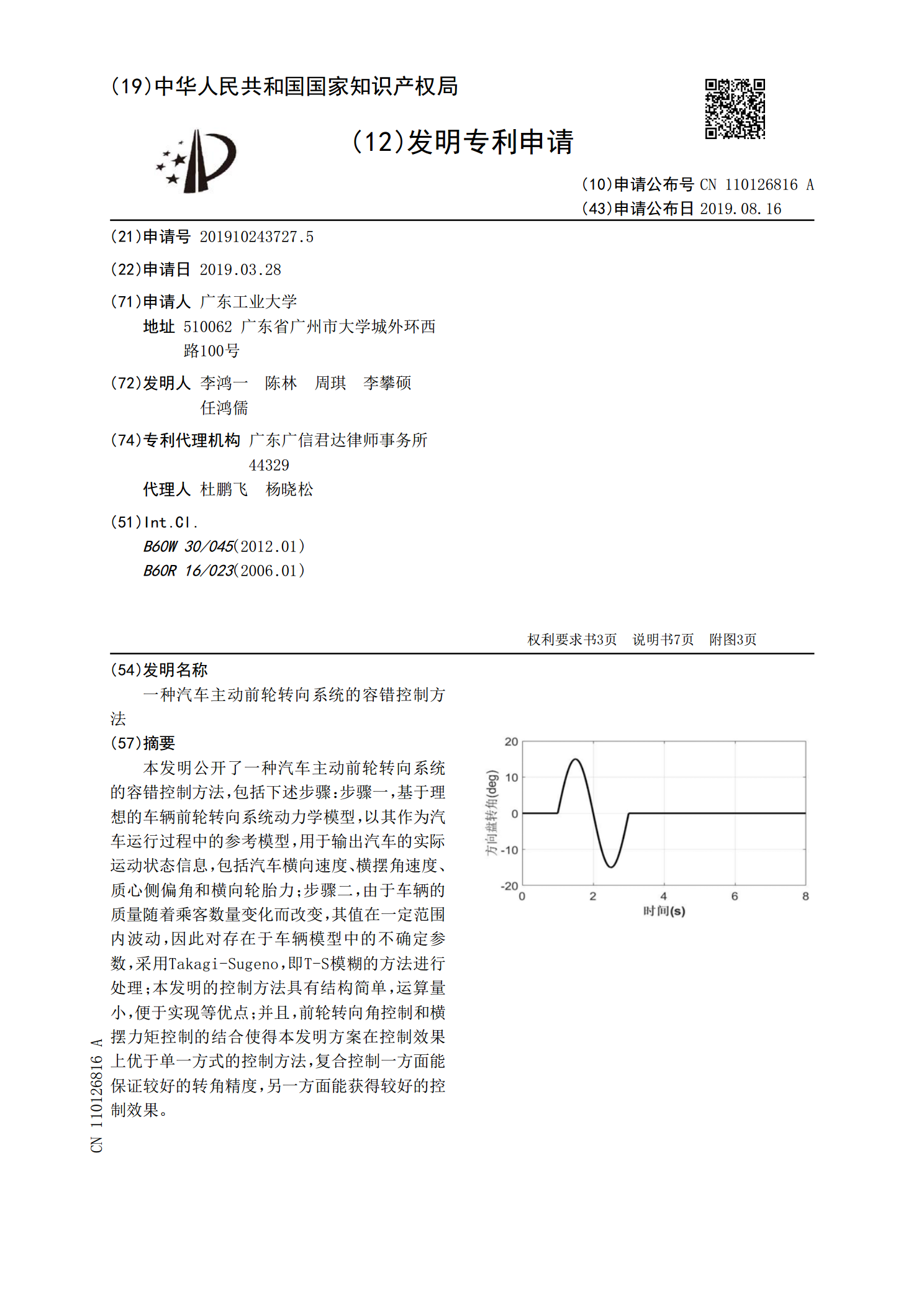
本发明公开了一种汽车主动前轮转向系统的容错控制方法,包括下述步骤:步骤一,基于理想的车辆前轮转向系统动力学模型,以其作为汽车运行过程中的参考模型,用于输出汽车的实际运动状态信息,包括汽车横向速度、横摆角速度、质心侧偏角和横向轮胎力;步骤二,由于车辆的质量随着乘客数量变化而改变,其值在一定范围内波动,因此对存在于车辆模型中的不确定参数,采用Takagi‑Sugeno,即T‑S模糊的方法进行处理;本发明的控制方法具有结构简单,运算量小,便于实现等优点;并且,前轮转向角控制和横摆力矩控制的结合使得本发明方案在控