
穿戴式下肢外骨骼康复机器人髋关节弹簧电机并联驱动器.pdf

傲丝****账号

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
穿戴式下肢外骨骼康复机器人髋关节弹簧电机并联驱动器.pdf
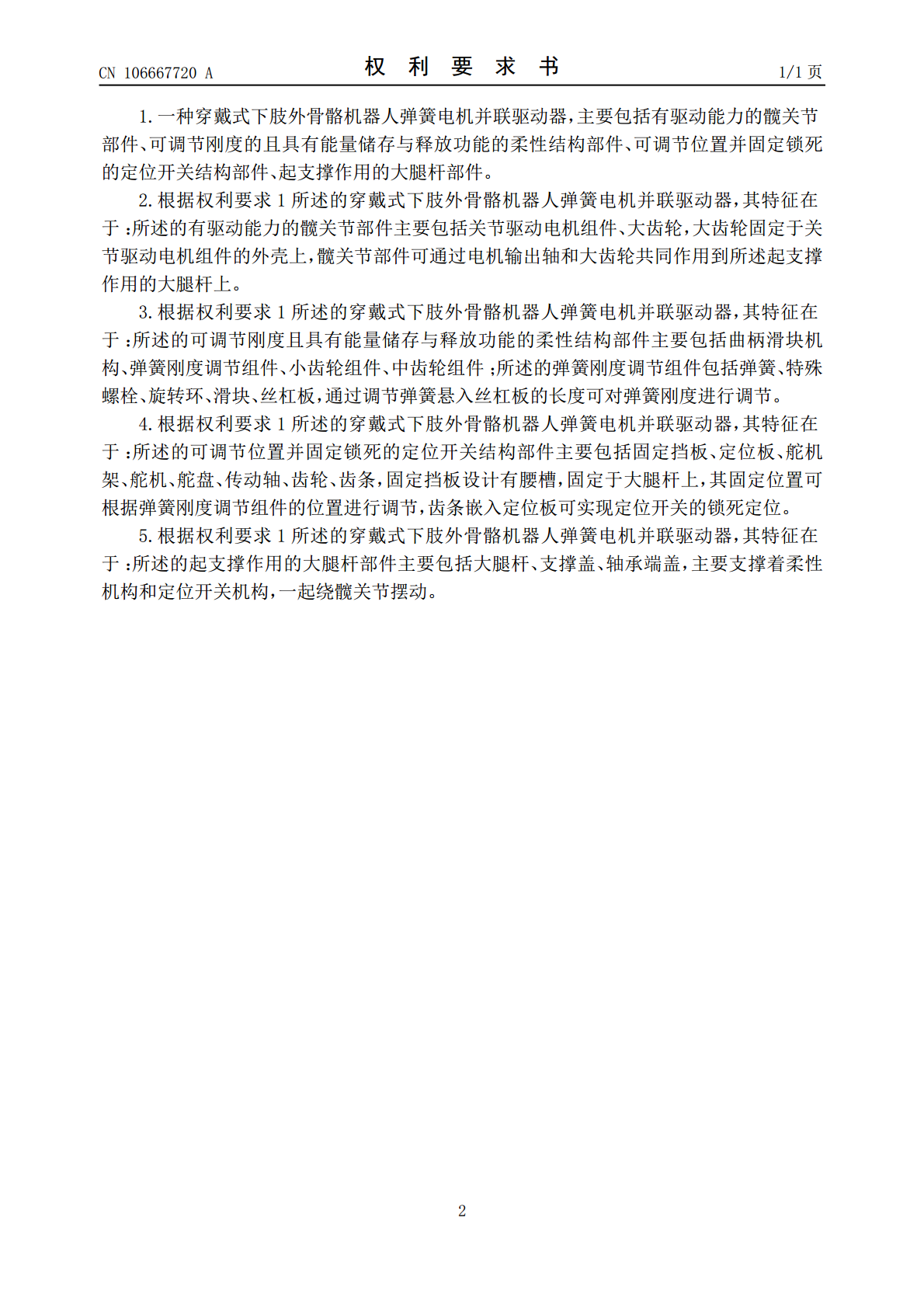
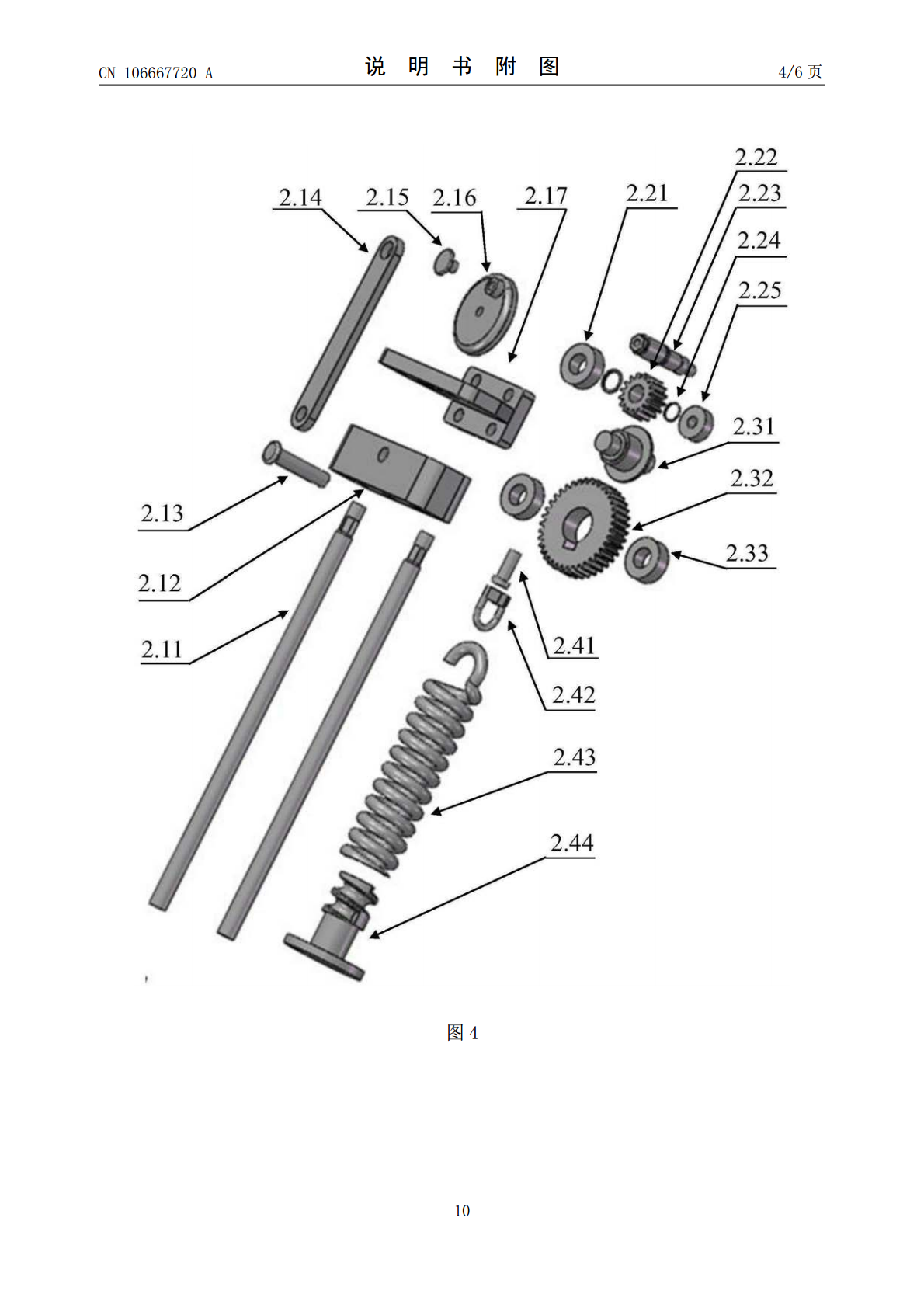
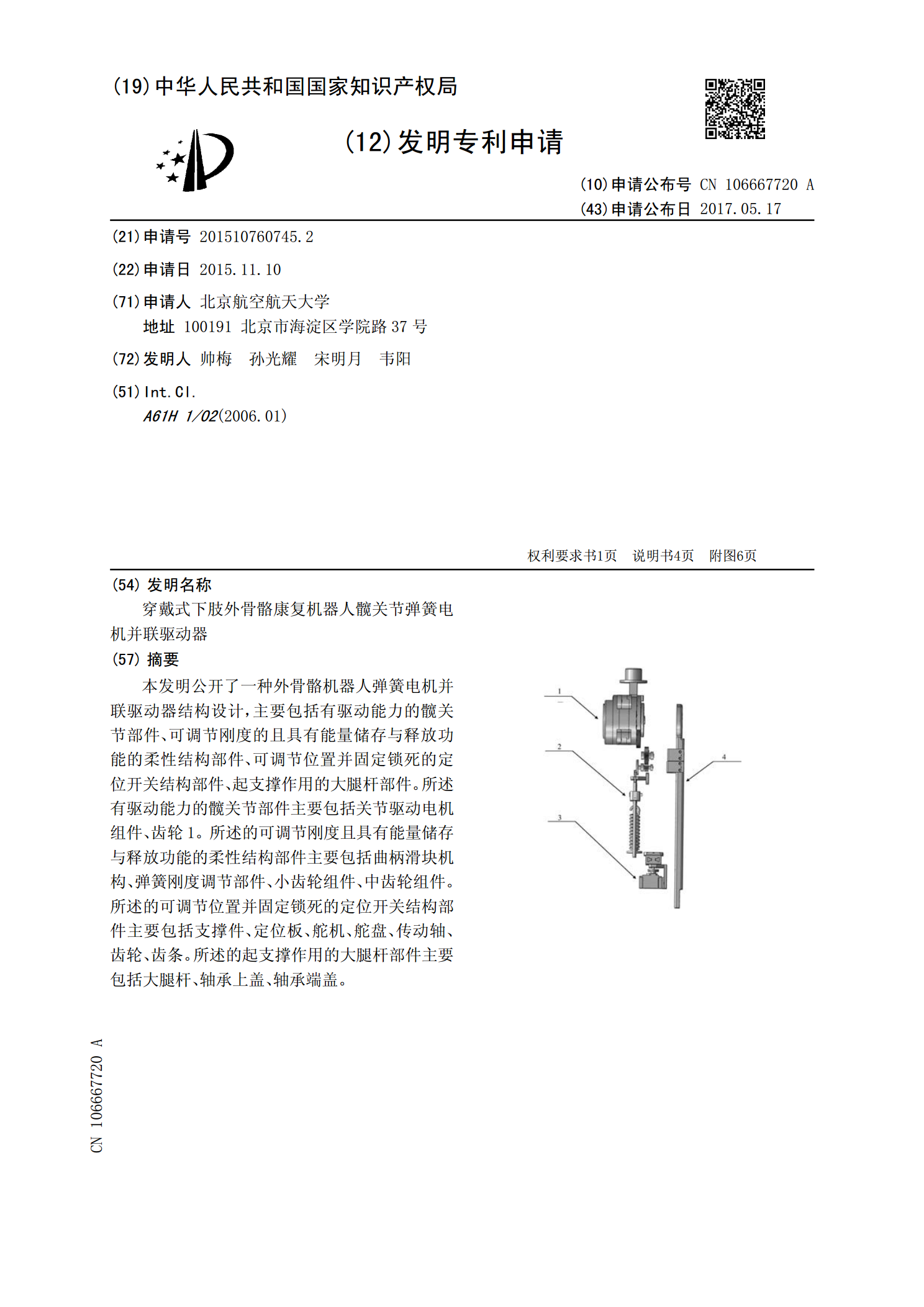
本发明公开了一种外骨骼机器人弹簧电机并联驱动器结构设计,主要包括有驱动能力的髋关节部件、可调节刚度的且具有能量储存与释放功能的柔性结构部件、可调节位置并固定锁死的定位开关结构部件、起支撑作用的大腿杆部件。所述有驱动能力的髋关节部件主要包括关节驱动电机组件、齿轮1。所述的可调节刚度且具有能量储存与释放功能的柔性结构部件主要包括曲柄滑块机构、弹簧刚度调节部件、小齿轮组件、中齿轮组件。所述的可调节位置并固定锁死的定位开关结构部件主要包括支撑件、定位板、舵机、舵盘、传动轴、齿轮、齿条。所述的起支撑作用的大腿杆部件
一种可穿戴式下肢外骨骼康复及助力机器人.pdf
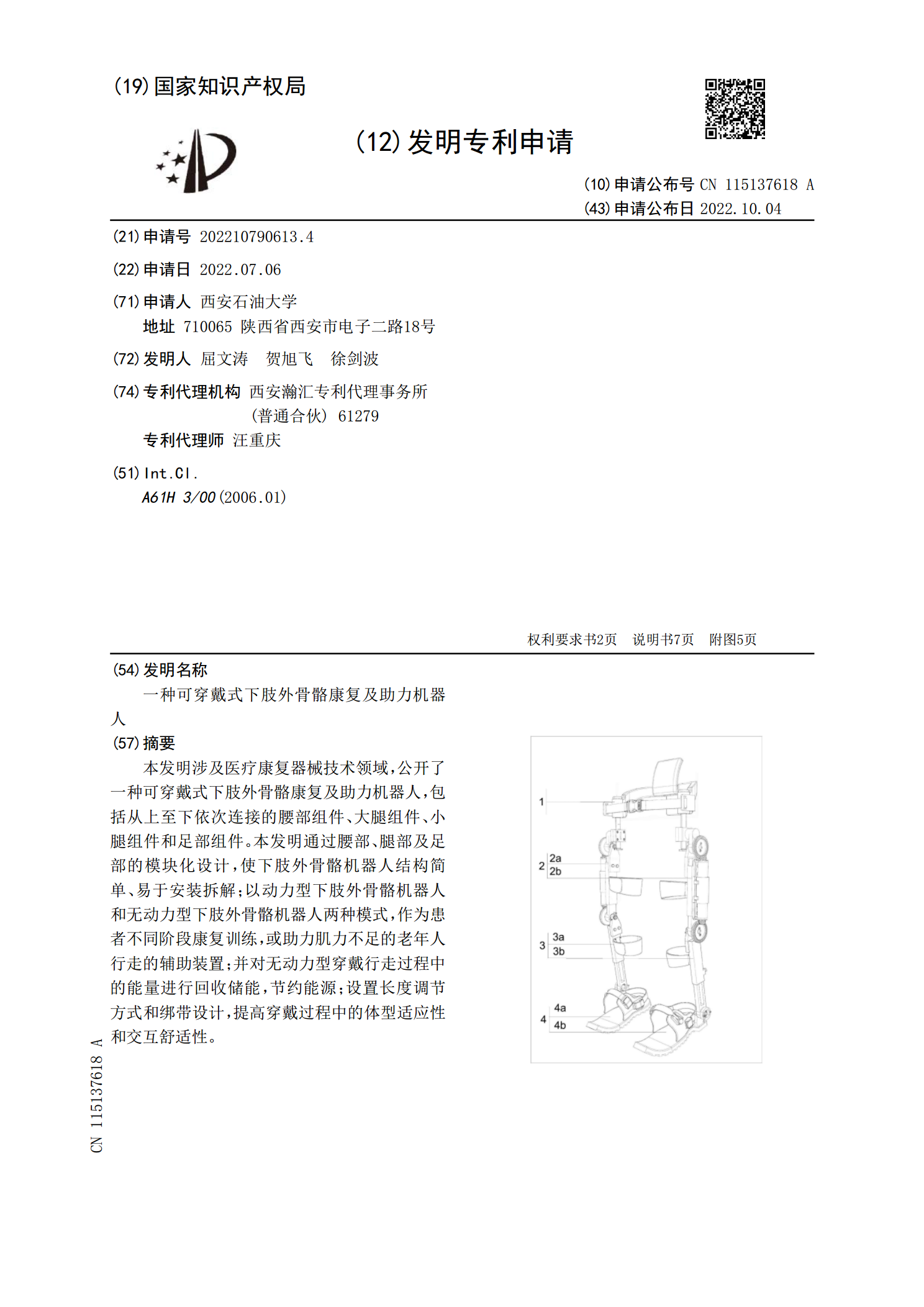
本发明涉及医疗康复器械技术领域,公开了一种可穿戴式下肢外骨骼康复及助力机器人,包括从上至下依次连接的腰部组件、大腿组件、小腿组件和足部组件。本发明通过腰部、腿部及足部的模块化设计,使下肢外骨骼机器人结构简单、易于安装拆解;以动力型下肢外骨骼机器人和无动力型下肢外骨骼机器人两种模式,作为患者不同阶段康复训练,或助力肌力不足的老年人行走的辅助装置;并对无动力型穿戴行走过程中的能量进行回收储能,节约能源;设置长度调节方式和绑带设计,提高穿戴过程中的体型适应性和交互舒适性。
一种外骨骼可穿戴式下肢康复训练机器人装置.pdf
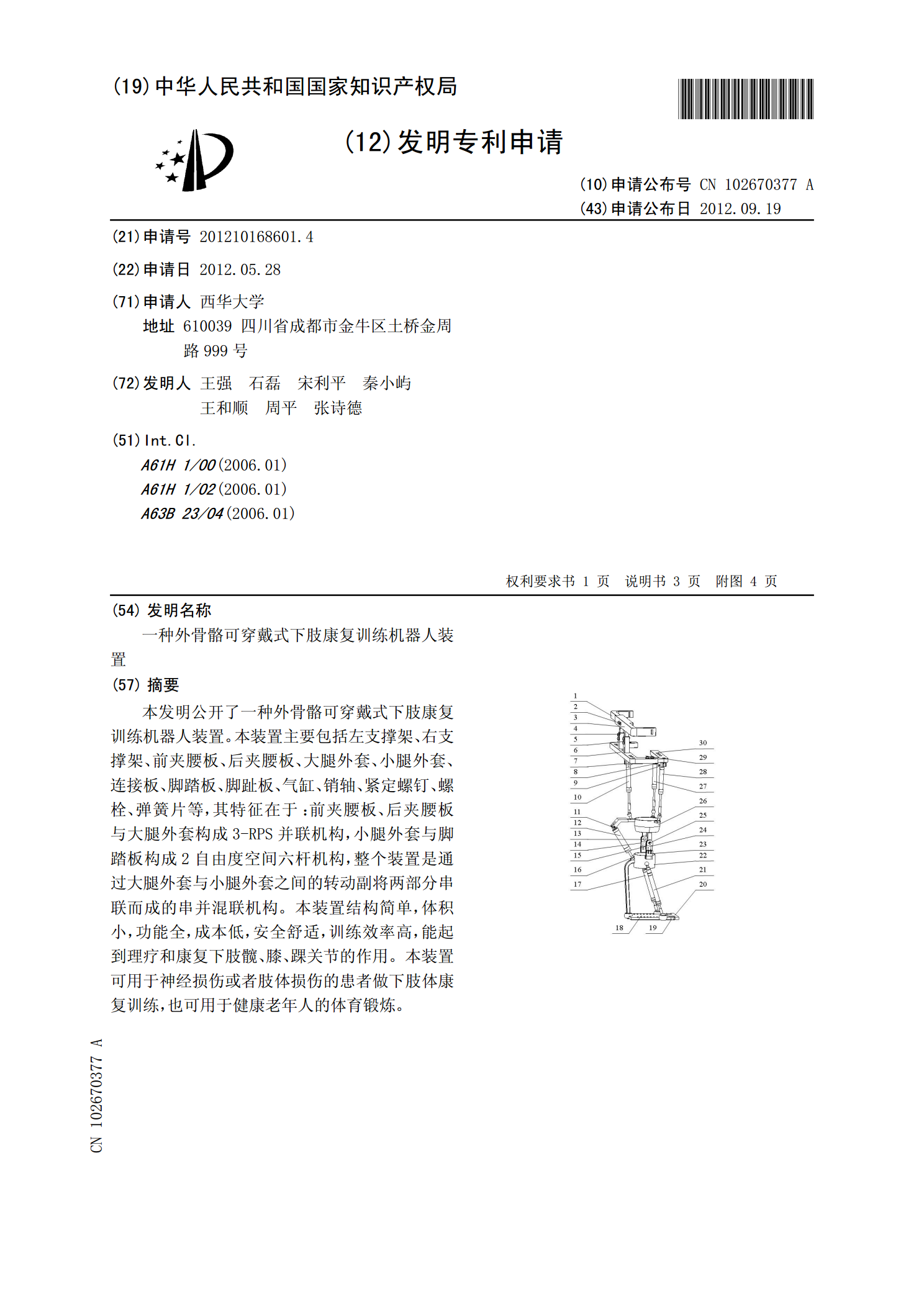
本发明公开了一种外骨骼可穿戴式下肢康复训练机器人装置。本装置主要包括左支撑架、右支撑架、前夹腰板、后夹腰板、大腿外套、小腿外套、连接板、脚踏板、脚趾板、气缸、销轴、紧定螺钉、螺栓、弹簧片等,其特征在于:前夹腰板、后夹腰板与大腿外套构成3-RPS并联机构,小腿外套与脚踏板构成2自由度空间六杆机构,整个装置是通过大腿外套与小腿外套之间的转动副将两部分串联而成的串并混联机构。本装置结构简单,体积小,功能全,成本低,安全舒适,训练效率高,能起到理疗和康复下肢髋、膝、踝关节的作用。本装置可用于神经损伤或者肢体损伤的
穿戴式下肢康复机器人的研究.pdf
哈尔滨工程大学硕士学位论文穿戴式下肢康复机器人的研究姓名:赵豫玉申请学位级别:硕士专业:机械电子工程指导教师:张立勋20090301要摘康复训练机器人技术是近年来迅速发展的一门新兴技术,是机器人技术在医学领域的新应用,经过几十年的发展已经取得了很大的成果。国外的康复机器人研究比较发达,而我国在康复工程领域的研究刚刚起步,因此课题的研究更具有实际应用意义。本课题研究的是穿戴式下肢康复机器人,它是康复训练机器人的一种,它可以固定在人身上,由驱动器驱动模仿正常人的步态,从而带动患者进行走步训练,使下肢有运动障碍
下肢康复用并联式外骨骼膝关节的设计.pdf
高技术通讯年第卷第期::下肢康复用并联式外骨骼膝关节的设计!印松!殷跃红(上海交通大学机器人研究所上海)摘要提出了下肢瘫痪病人康复用并联式外骨骼膝关节的设计方法。通过分析传统单自由度转动副和多连杆机构的不足,采用平面二自由度并联机构对膝关节外骨骼化,以提高外骨骼膝关节的仿生性和通用性,并提出了该机构辅助人体膝关节进行康复训练的实施方案。在运动学分析的基础上,以满足人体正常行走时膝关节的运动范围要求和提高机构运动学性能为目标进行了结构参数优化设计。初步分析表明,该机构用于下肢瘫痪病人康复训练时具有仿生性高和