
穿戴式下肢康复机器人的研究.pdf

as****16


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共75页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
穿戴式下肢康复机器人的研究.pdf
哈尔滨工程大学硕士学位论文穿戴式下肢康复机器人的研究姓名:赵豫玉申请学位级别:硕士专业:机械电子工程指导教师:张立勋20090301要摘康复训练机器人技术是近年来迅速发展的一门新兴技术,是机器人技术在医学领域的新应用,经过几十年的发展已经取得了很大的成果。国外的康复机器人研究比较发达,而我国在康复工程领域的研究刚刚起步,因此课题的研究更具有实际应用意义。本课题研究的是穿戴式下肢康复机器人,它是康复训练机器人的一种,它可以固定在人身上,由驱动器驱动模仿正常人的步态,从而带动患者进行走步训练,使下肢有运动障碍

可穿戴式下肢康复机器人系统研究的任务书.docx
可穿戴式下肢康复机器人系统研究的任务书任务书一、任务背景随着全球老龄化问题日益凸显,康复疗法的需求也变得越来越紧迫。在此背景下,可穿戴式下肢康复机器人的开发和研究变得越来越重要。可穿戴式下肢康复机器人是一种能够帮助康复患者实现下肢运动康复的新型设备,它能够提高患者康复效果,降低劳动强度,减轻医护人员负担,是一项具有广阔市场前景的技术。二、任务目标本项目旨在开发一种可穿戴式下肢康复机器人系统,实现以下目标:1.设计一套机器人座式行走平台,能够支持康复患者快速平稳地完成康复运动。2.设计一套下肢外骨骼机器人,
一种可穿戴式下肢康复机器人.pdf
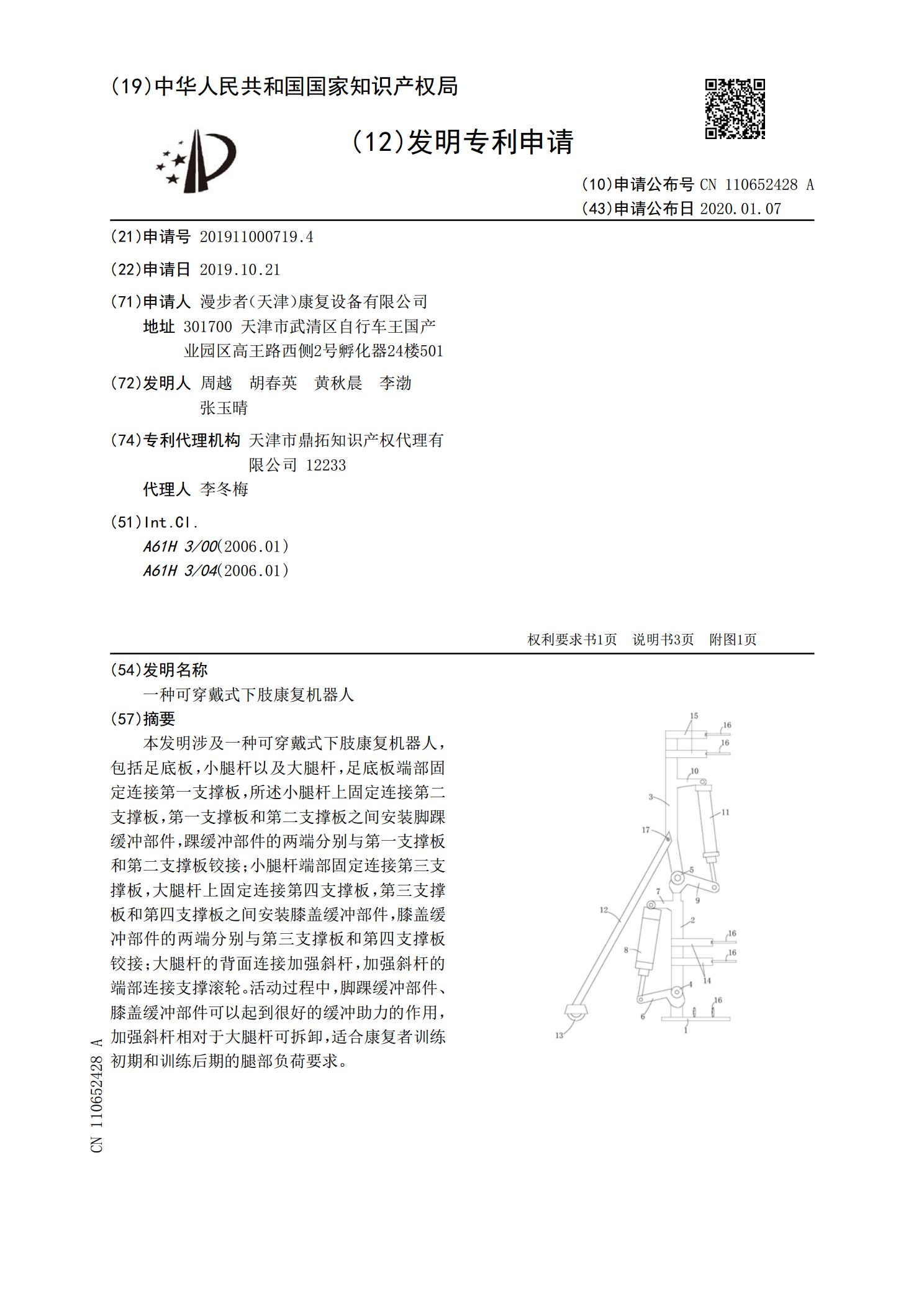
本发明涉及一种可穿戴式下肢康复机器人,包括足底板,小腿杆以及大腿杆,足底板端部固定连接第一支撑板,所述小腿杆上固定连接第二支撑板,第一支撑板和第二支撑板之间安装脚踝缓冲部件,踝缓冲部件的两端分别与第一支撑板和第二支撑板铰接;小腿杆端部固定连接第三支撑板,大腿杆上固定连接第四支撑板,第三支撑板和第四支撑板之间安装膝盖缓冲部件,膝盖缓冲部件的两端分别与第三支撑板和第四支撑板铰接;大腿杆的背面连接加强斜杆,加强斜杆的端部连接支撑滚轮。活动过程中,脚踝缓冲部件、膝盖缓冲部件可以起到很好的缓冲助力的作用,加强斜杆相
一种穿戴式下肢康复机器人的步态规划及康复策略.pdf
WearableMasterGaitLimbsRehabilitationRobotPlanningandStrategyofLowerSupervisor:Prof.WangMaj:MachineryManufacturingQiangXihuaUniversityAutomationDegreeDissertationCandidate:XuStudentID:212009080201010aRulongApril,2012ClassifiexiIndex:UDC:or学位论文作者始鬣朊指导教师始彩.
一种可穿戴式下肢外骨骼康复及助力机器人.pdf
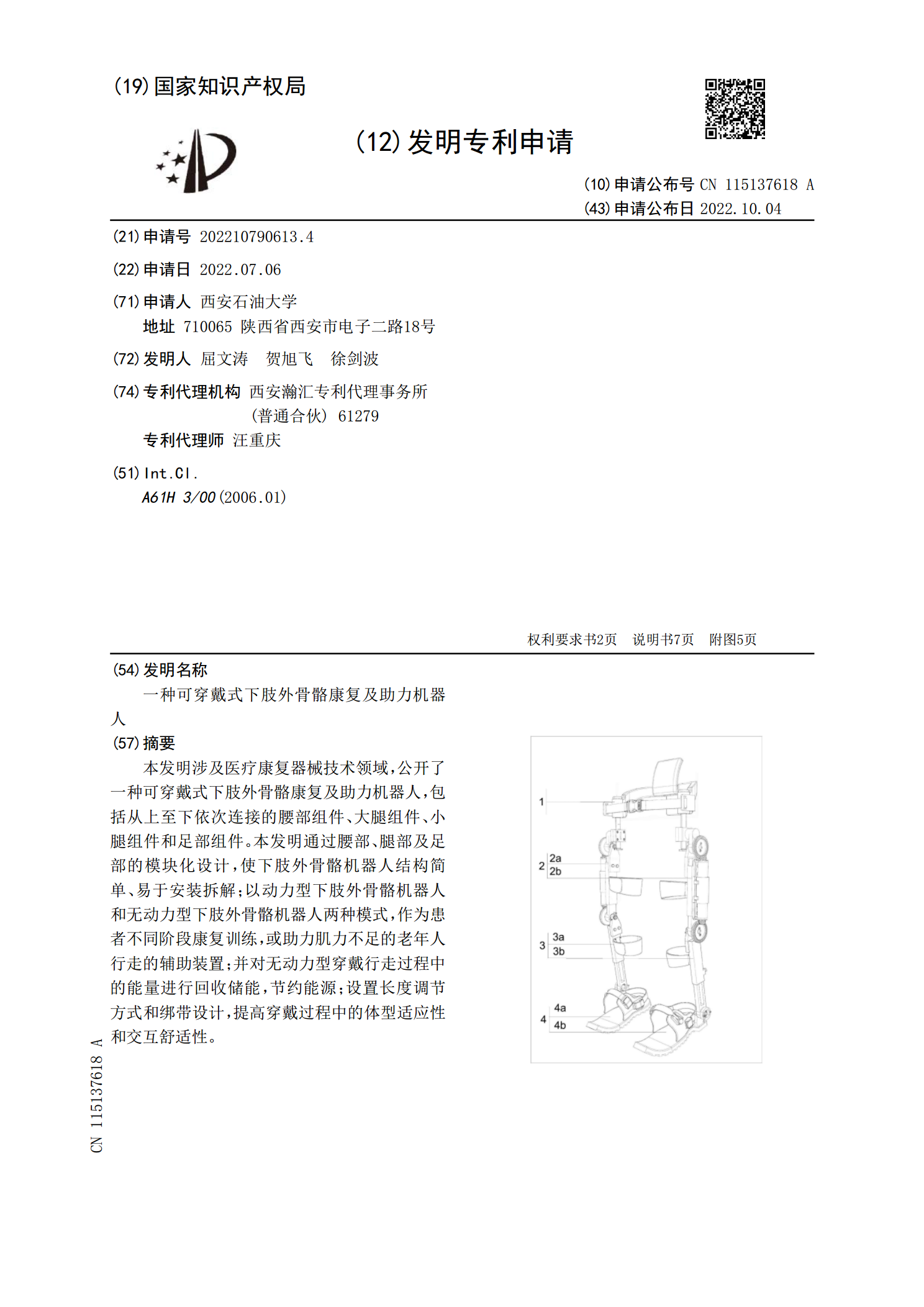
本发明涉及医疗康复器械技术领域,公开了一种可穿戴式下肢外骨骼康复及助力机器人,包括从上至下依次连接的腰部组件、大腿组件、小腿组件和足部组件。本发明通过腰部、腿部及足部的模块化设计,使下肢外骨骼机器人结构简单、易于安装拆解;以动力型下肢外骨骼机器人和无动力型下肢外骨骼机器人两种模式,作为患者不同阶段康复训练,或助力肌力不足的老年人行走的辅助装置;并对无动力型穿戴行走过程中的能量进行回收储能,节约能源;设置长度调节方式和绑带设计,提高穿戴过程中的体型适应性和交互舒适性。