
下肢康复用并联式外骨骼膝关节的设计.pdf

qw****27

1/7
2/7
3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
下肢康复用并联式外骨骼膝关节的设计.pdf
高技术通讯年第卷第期::下肢康复用并联式外骨骼膝关节的设计!印松!殷跃红(上海交通大学机器人研究所上海)摘要提出了下肢瘫痪病人康复用并联式外骨骼膝关节的设计方法。通过分析传统单自由度转动副和多连杆机构的不足,采用平面二自由度并联机构对膝关节外骨骼化,以提高外骨骼膝关节的仿生性和通用性,并提出了该机构辅助人体膝关节进行康复训练的实施方案。在运动学分析的基础上,以满足人体正常行走时膝关节的运动范围要求和提高机构运动学性能为目标进行了结构参数优化设计。初步分析表明,该机构用于下肢瘫痪病人康复训练时具有仿生性高和
一种康复用的并联膝关节外骨骼机构.pdf
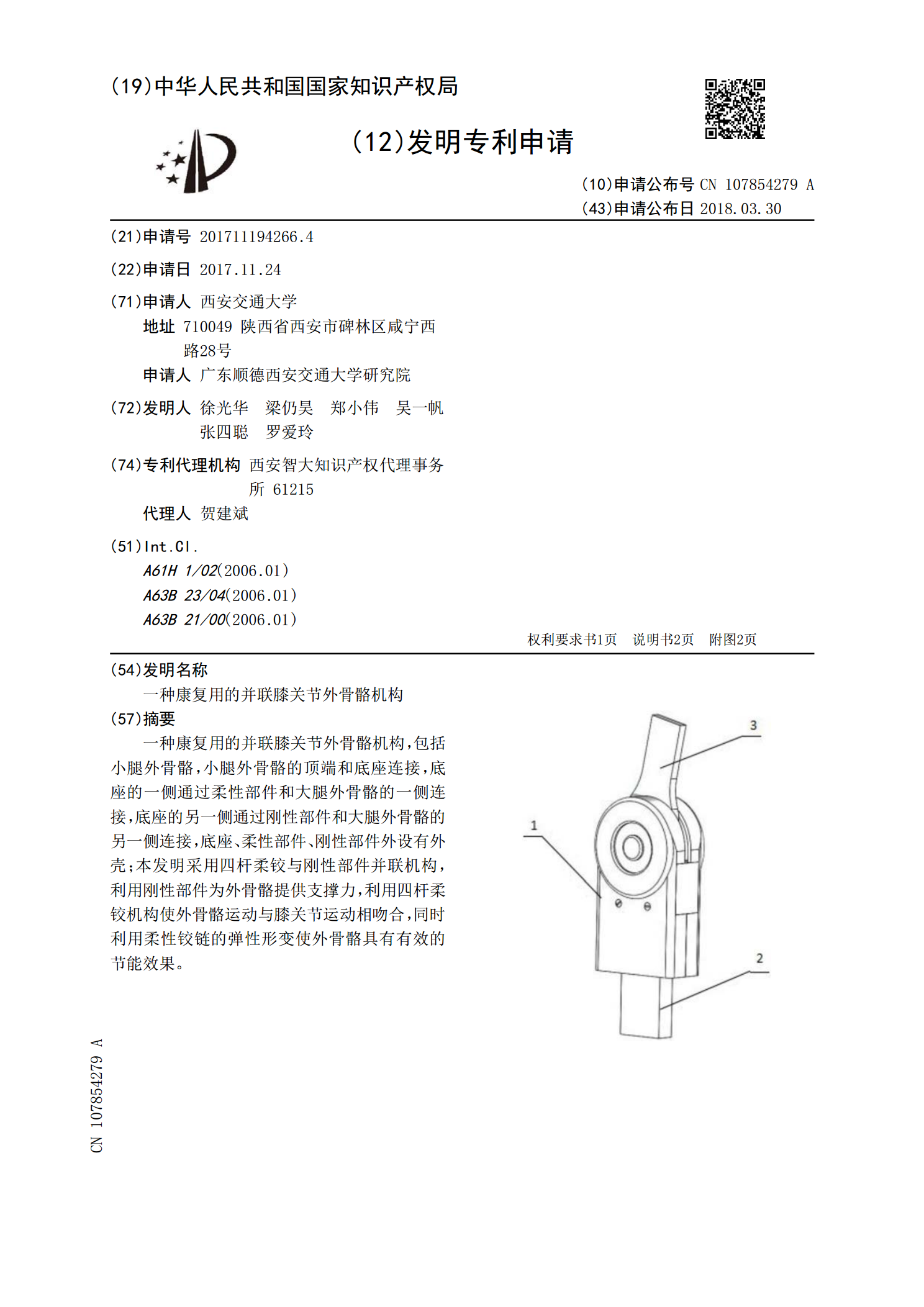
一种康复用的并联膝关节外骨骼机构,包括小腿外骨骼,小腿外骨骼的顶端和底座连接,底座的一侧通过柔性部件和大腿外骨骼的一侧连接,底座的另一侧通过刚性部件和大腿外骨骼的另一侧连接,底座、柔性部件、刚性部件外设有外壳;本发明采用四杆柔铰与刚性部件并联机构,利用刚性部件为外骨骼提供支撑力,利用四杆柔铰机构使外骨骼运动与膝关节运动相吻合,同时利用柔性铰链的弹性形变使外骨骼具有有效的节能效果。
一种并联式下肢外骨骼康复训练装置.pdf
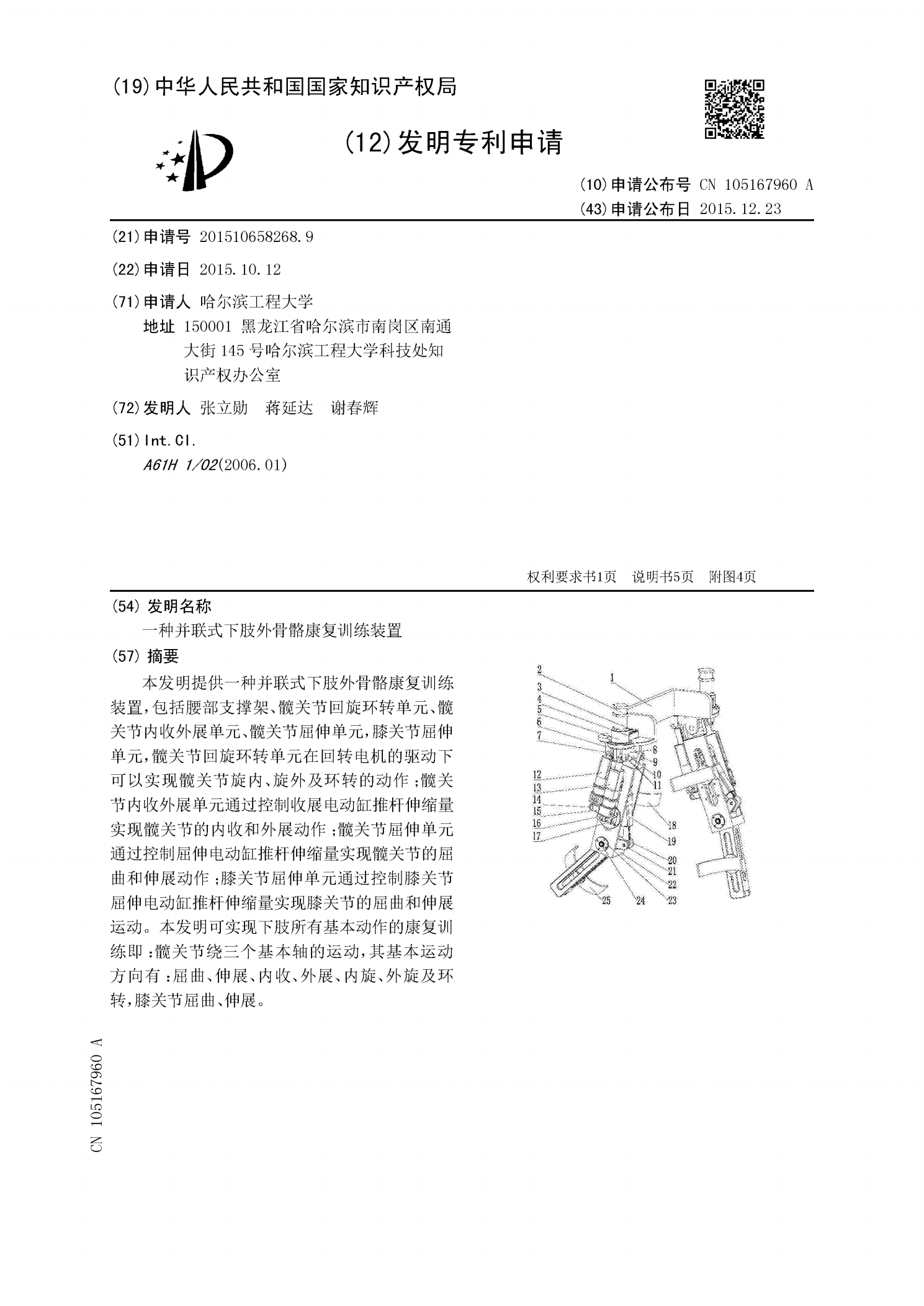
本发明提供一种并联式下肢外骨骼康复训练装置,包括腰部支撑架、髋关节回旋环转单元、髋关节内收外展单元、髋关节屈伸单元,膝关节屈伸单元,髋关节回旋环转单元在回转电机的驱动下可以实现髋关节旋内、旋外及环转的动作;髋关节内收外展单元通过控制收展电动缸推杆伸缩量实现髋关节的内收和外展动作;髋关节屈伸单元通过控制屈伸电动缸推杆伸缩量实现髋关节的屈曲和伸展动作;膝关节屈伸单元通过控制膝关节屈伸电动缸推杆伸缩量实现膝关节的屈曲和伸展运动。本发明可实现下肢所有基本动作的康复训练即:髋关节绕三个基本轴的运动,其基本运动方向有
穿戴式下肢外骨骼机构分析与设计.pdf
北京工业大学硕士学位论文窒夔式王照处置螫扭构佥逝量逡让2题英文并列‘、●1856j目艺至荩业:扭越剑造区墓自动丝扭墨厶蕉苤奎剑丝麴拯研究生姓名:专一研究方向:导师:.职称:分类号:TP24.2单位代码:10005学密ANALYSISANDDESIGNOFWEARABLELOwEREXTREMITYEXOSKELETON垫iQ生堇旦号:$200701092级:公开授予单位名称和地址j壁塞至些太堂j竖塞麴田匡垩巫国!鲤呈论文报告提交日期学位授予日期≥。..心r?、,.乳_,.、铆签名:兰物缉n期:业㈣删㈣㈣7

下肢外骨骼并联关节研究的中期报告.docx
下肢外骨骼并联关节研究的中期报告本次研究旨在探究下肢外骨骼并联关节的设计与控制方法,以提高其运动性能和适用性。目前已完成研究的中期报告,具体内容如下:1.设计与制造针对既有的下肢外骨骼单一自由度关节控制模式存在的问题,我们设计了一种多自由度、能够更加贴合人体运动机理的并联关节。并联关节采用了多个驱动电机和传感器,可以实现精细的运动控制和运动数据采集。同时,我们采用3D打印技术进行了关节部件的制造,提高了制造的精度和效率。2.控制算法为了实现关节的精细控制,我们提出了一种基于反向动力学控制的控制算法。该算法