
一种线控转向系统试验台架.pdf

秀华****魔王


1/9

2/9

3/9

4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种线控转向系统试验台架.pdf
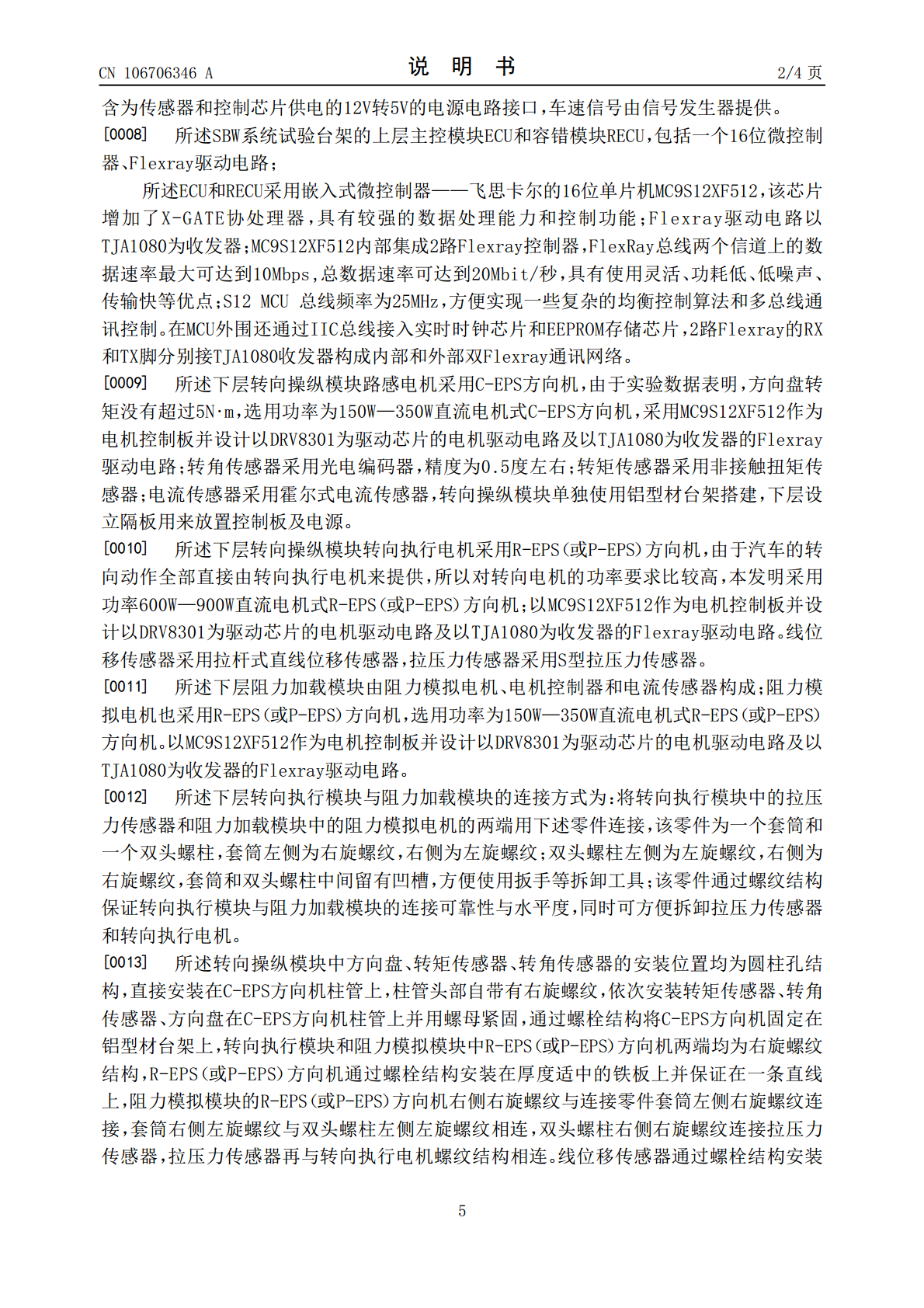
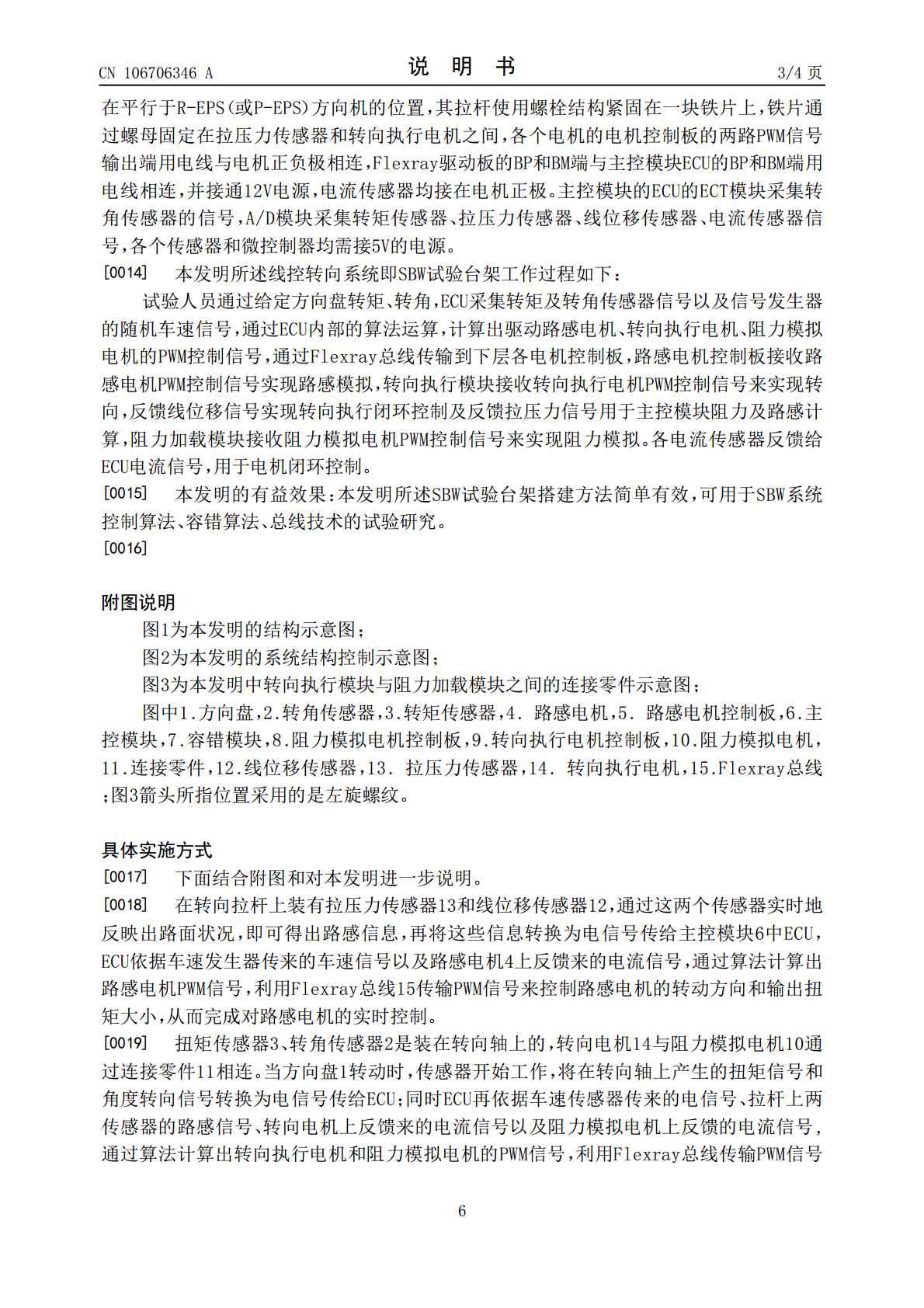
一种线控转向系统试验台架,包括主控模块、容错模块、转向操纵模块、转向执行模块和阻力加载模块及其连接零件的设计;转向盘与转向柱助力式方向机相连来模拟路面反馈;两个不同功率的齿轮齿条式方向机通过零件连接,通过主控单片机接收传感器信号,利用Flexray总线传输PWM信号来实现转向及阻力模拟。去除了转向执行及操纵之间的机械连接,可以自由设计传动比和路感来改变系统力传递特性及角传递特性,节约了汽车的布置空间,改善了车辆的操纵稳定性。可以模拟各种状态下的路面阻力,提高了系统的准确性。本发明所述SBW试验台架搭建方法

一种汽车线控转向试验台架阻力模拟装置.pdf
一种汽车线控转向试验台架阻力模拟机构,其加载油缸(1)的活塞杆与汽车的转向执行机构齿轮齿条(3)相连,将侧向力作用于齿条机构(3)上以模拟车辆转向时所受的地面侧向阻力。加载油缸(1)的进油口和出油口分别与电磁换向阀(5)的工作油口A、B相连。电磁换向阀(5)的进油口P与主泵(10)的出油口相连,主泵(10)的出油口并联电磁比例溢流阀(12)。溢流阀(7)的进油口并联辅助泵(8),主泵(10)和辅助泵(8)的进油口与过滤器(9)相连。阻力模拟控制器(6)与电磁换向阀(5)、电磁比例溢流阀(12)连接,向电磁
一种线控转向系统.pdf
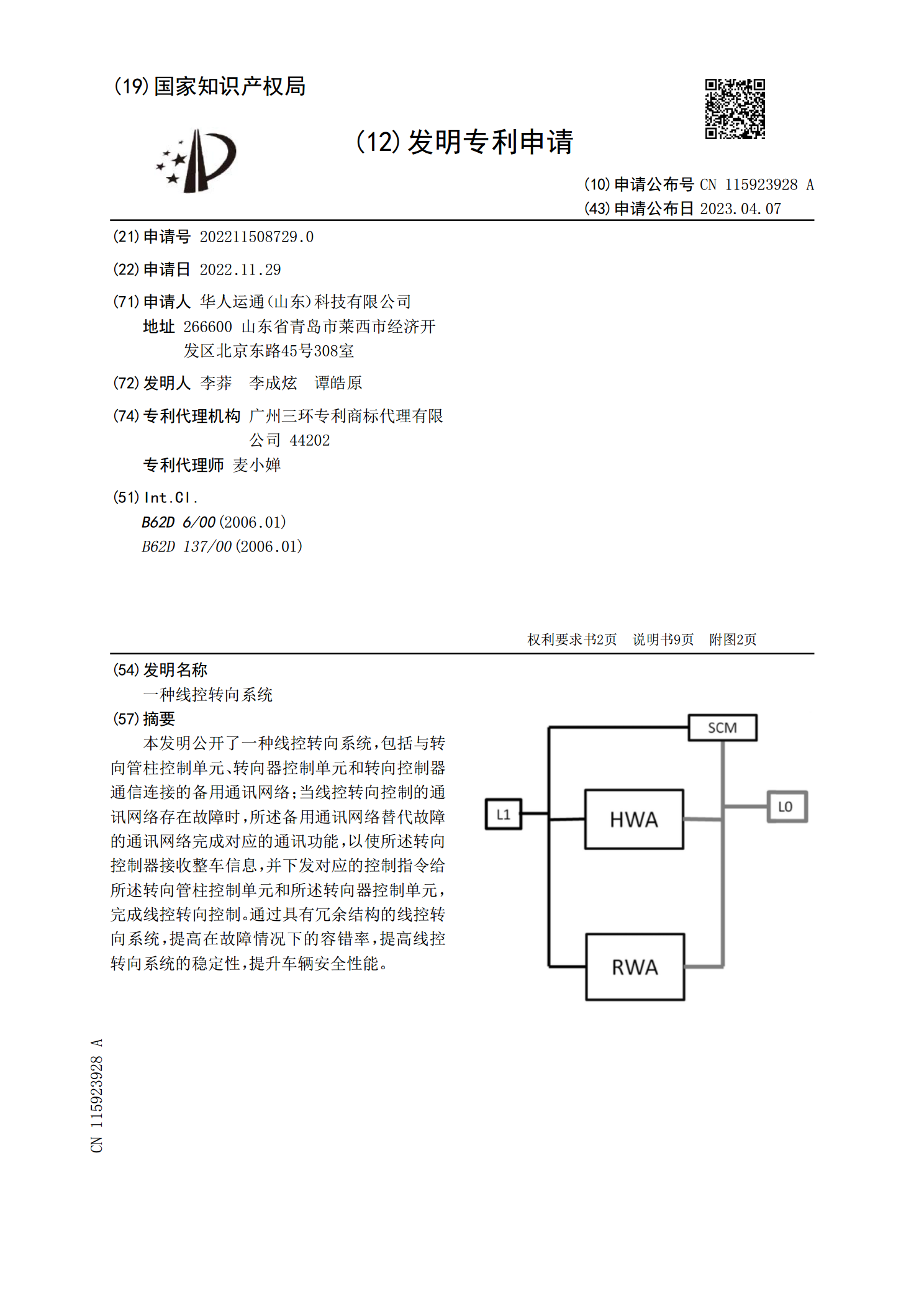
本发明公开了一种线控转向系统,包括与转向管柱控制单元、转向器控制单元和转向控制器通信连接的备用通讯网络;当线控转向控制的通讯网络存在故障时,所述备用通讯网络替代故障的通讯网络完成对应的通讯功能,以使所述转向控制器接收整车信息,并下发对应的控制指令给所述转向管柱控制单元和所述转向器控制单元,完成线控转向控制。通过具有冗余结构的线控转向系统,提高在故障情况下的容错率,提高线控转向系统的稳定性,提升车辆安全性能。
线控转向的转向系统.pdf
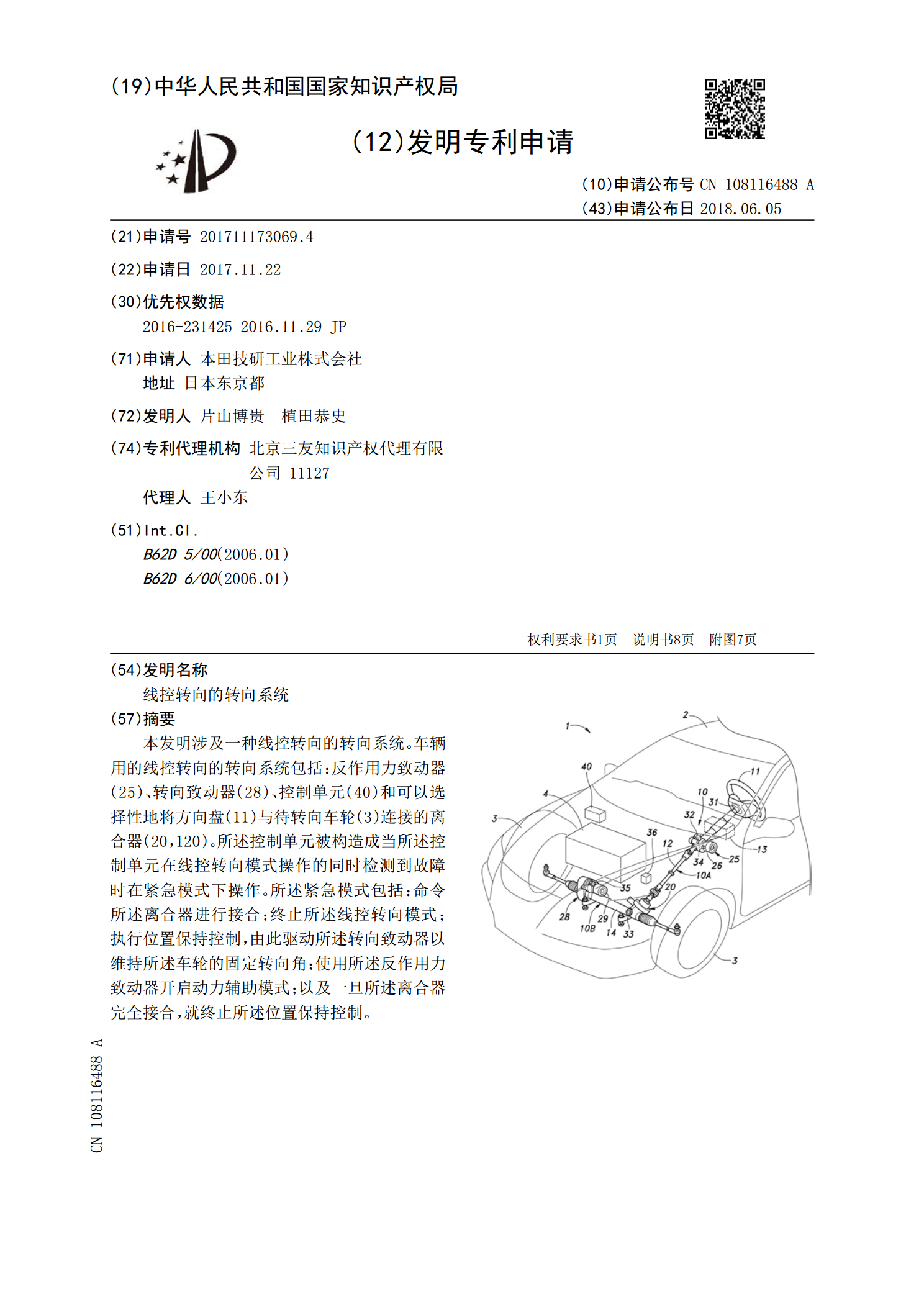
本发明涉及一种线控转向的转向系统。车辆用的线控转向的转向系统包括:反作用力致动器(25)、转向致动器(28)、控制单元(40)和可以选择性地将方向盘(11)与待转向车轮(3)连接的离合器(20,120)。所述控制单元被构造成当所述控制单元在线控转向模式操作的同时检测到故障时在紧急模式下操作。所述紧急模式包括:命令所述离合器进行接合;终止所述线控转向模式;执行位置保持控制,由此驱动所述转向致动器以维持所述车轮的固定转向角;使用所述反作用力致动器开启动力辅助模式;以及一旦所述离合器完全接合,就终止所述位置保持
线控转向系统和线控转向系统的控制方法.pdf
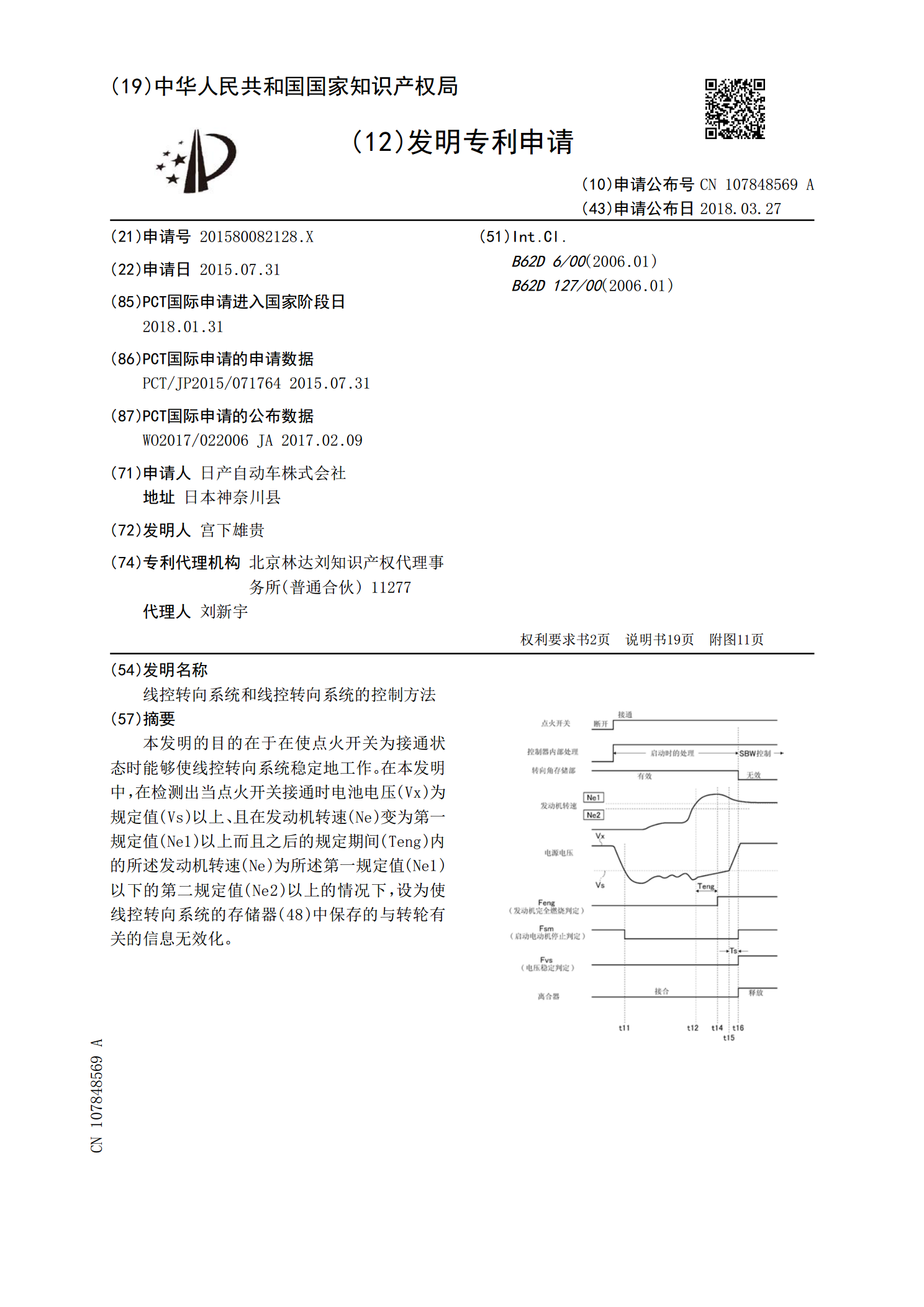
本发明的目的在于在使点火开关为接通状态时能够使线控转向系统稳定地工作。在本发明中,在检测出当点火开关接通时电池电压(Vx)为规定值(Vs)以上、且在发动机转速(Ne)变为第一规定值(Ne1)以上而且之后的规定期间(Teng)内的所述发动机转速(Ne)为所述第一规定值(Ne1)以下的第二规定值(Ne2)以上的情况下,设为使线控转向系统的存储器(48)中保存的与转轮有关的信息无效化。