
一种轮毂电机驱动车辆的动力分配方法.pdf

文光****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮毂电机驱动车辆的动力分配方法.pdf
本发明提供了一种轮毂电机驱动车辆的动力分配方法,根据车轮旋转动力学模型,采用滑模控制理论跟踪控制分配中得到的纵向力和侧向力,得到各电动轮的输出转矩与各车轮的转角,对滑移率和侧偏角进行控制,实现了对车辆的驱动、制动和转向子系统进行集成控制,避免功能重叠和结构干涉,还实现了进行车辆操纵稳定性和节能的多目标优化控制。

一种轮毂电机驱动车辆的转矩分配方法.pdf
本申请涉及一种轮毂电机驱动车辆的转矩分配的方法,通过对轮毂电机和机械制动器的输出转矩进行分配,实现车辆操纵稳定性所需的整车目标控制力和力矩。所述转矩分配方法包含以下步骤:一、采用最优控制分配方法,根据整车需求纵向合力,整车需求侧向合力以及整车需求横摆力矩,对电动轮纵向力建立最优控制分配方程;二、根据建立的电动轮纵向力最优控制分配方程,求解得到各电动轮纵向力最优解,结合电动轮输出转矩与电动轮纵向力的关系,得到电动轮输出转矩;三、根据轮毂电机转矩与机械制动器转矩的关系,得到轮毂电机输出转矩和制动器输出转矩。
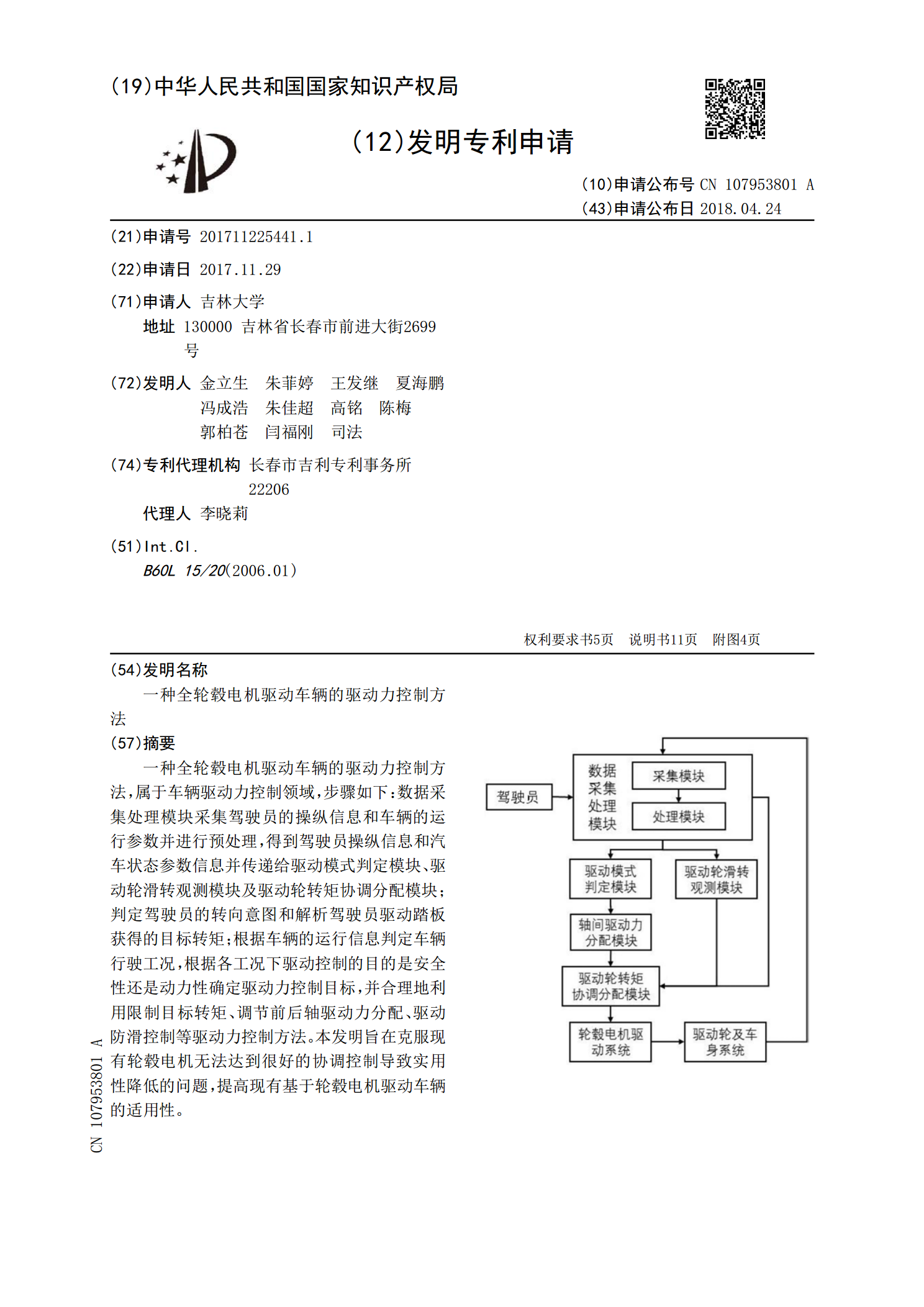
一种全轮毂电机驱动车辆的驱动力控制方法.pdf
一种全轮毂电机驱动车辆的驱动力控制方法,属于车辆驱动力控制领域,步骤如下:数据采集处理模块采集驾驶员的操纵信息和车辆的运行参数并进行预处理,得到驾驶员操纵信息和汽车状态参数信息并传递给驱动模式判定模块、驱动轮滑转观测模块及驱动轮转矩协调分配模块;判定驾驶员的转向意图和解析驾驶员驱动踏板获得的目标转矩;根据车辆的运行信息判定车辆行驶工况,根据各工况下驱动控制的目的是安全性还是动力性确定驱动力控制目标,并合理地利用限制目标转矩、调节前后轴驱动力分配、驱动防滑控制等驱动力控制方法。本发明旨在克服现有轮毂电机无法

一种轮毂电机驱动城市公交的动力分配及功率匹配方法.pdf
本发明提供一种轮毂电机驱动城市公交的动力分配及功率匹配方法,轮毂电机驱动城市公交由四个装于轮毂中的轮毂电机作为动力输出机构驱动;在普通路况下低速与中速行驶时,只使用后轮驱动;高速行驶时,采用前轮驱动;加速和爬坡时,用全轮驱动,按照前后轮的额定功率的比例分配前后轮的驱动力;所述的普通路况为除爬坡路况外的其它路况;所述的低速、中速和高速为预设的速度区间。使用本发明方法进行轮毂电机驱动城市公交的动力分配与功率匹配,使城市公交大部分时间可以行驶在高效率区,减少行驶过程中能量的浪费。

一种四轮转向轮毂电机驱动车辆的轮速分配方法.pdf
本发明提供了一种四轮转向轮毂电机驱动车辆的轮速分配方法,属于轮式车辆的牵引控制技术领域。建立车辆侧向动力学连续模型和四轮转向轮毂电机驱动车辆的离散侧向动力学模型;通过计算四轮转向轮毂电机驱动车辆的最优转角控制量;计算四轮转向轮毂电机驱动车辆的侧向运动状态预测值:计算四轮转向轮毂电机驱动车辆的纵向速度预测值:计算车辆坐标系中的轮心速度:计算四轮转向轮毂电机驱动车辆的车轮速度偏角:计算四轮转向轮毂电机驱动车辆的轮胎侧偏角:计算四轮转向轮毂电机驱动车辆的车轮参考转速;计算车轮作纯滚动时的转速预测值等步骤,即可获