
一种四轮转向轮毂电机驱动车辆的轮速分配方法.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种四轮转向轮毂电机驱动车辆的轮速分配方法.pdf
本发明提供了一种四轮转向轮毂电机驱动车辆的轮速分配方法,属于轮式车辆的牵引控制技术领域。建立车辆侧向动力学连续模型和四轮转向轮毂电机驱动车辆的离散侧向动力学模型;通过计算四轮转向轮毂电机驱动车辆的最优转角控制量;计算四轮转向轮毂电机驱动车辆的侧向运动状态预测值:计算四轮转向轮毂电机驱动车辆的纵向速度预测值:计算车辆坐标系中的轮心速度:计算四轮转向轮毂电机驱动车辆的车轮速度偏角:计算四轮转向轮毂电机驱动车辆的轮胎侧偏角:计算四轮转向轮毂电机驱动车辆的车轮参考转速;计算车轮作纯滚动时的转速预测值等步骤,即可获

一种四轮毂电机驱动车辆转向的控制方法.pdf
本发明公开了一种四轮毂电机驱动车辆转向的控制方法,包括:获取驾驶员输入信号和车辆实际动力信息;计算期望车辆质心侧偏角、期望车辆横摆角速度和期望车速;计算质心侧偏角偏差、横摆角速度偏差和车速偏差;依据质心侧偏角偏差、横摆角速度偏差和车速偏差,采用PID控制算法和模糊PID控制算法,生成虚拟控制指令;建立车辆轮胎附着利用率目标函数和车辆能量消耗目标函数;依据虚拟控制指令和目标函数建立第一层转矩分配优化函数和第二层转矩分配优化函数;利用两层转矩分配优化函数为四个轮毂电机进行转矩分配,以控制车辆转向。本发明能够在
一种轮边/轮毂电机后轮驱动车辆转向控制方法及系统.pdf
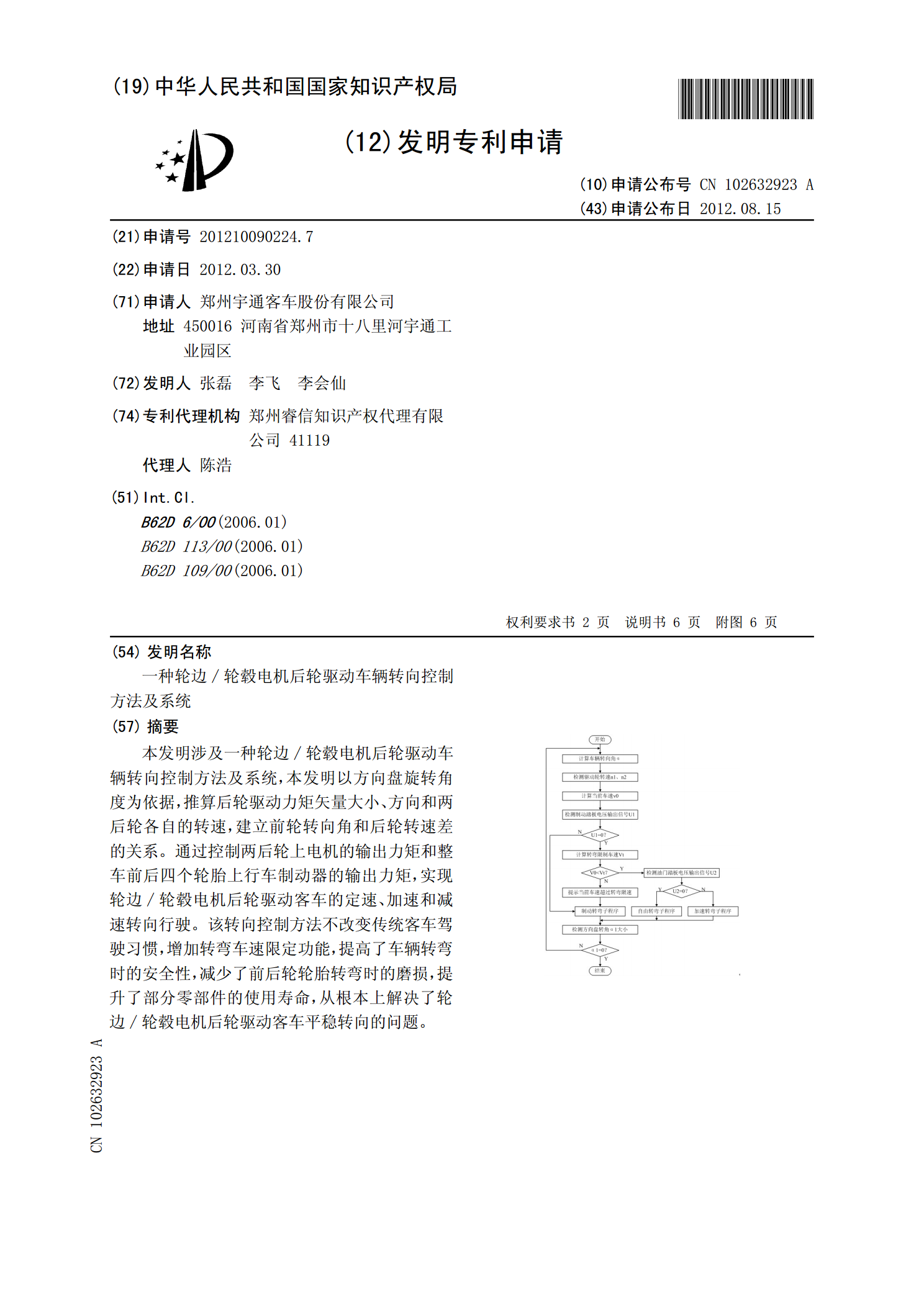
本发明涉及一种轮边/轮毂电机后轮驱动车辆转向控制方法及系统,本发明以方向盘旋转角度为依据,推算后轮驱动力矩矢量大小、方向和两后轮各自的转速,建立前轮转向角和后轮转速差的关系。通过控制两后轮上电机的输出力矩和整车前后四个轮胎上行车制动器的输出力矩,实现轮边/轮毂电机后轮驱动客车的定速、加速和减速转向行驶。该转向控制方法不改变传统客车驾驶习惯,增加转弯车速限定功能,提高了车辆转弯时的安全性,减少了前后轮轮胎转弯时的磨损,提升了部分零部件的使用寿命,从根本上解决了轮边/轮毂电机后轮驱动客车平稳转向的问题。

一种轮毂电机驱动车辆的转矩分配方法.pdf
本申请涉及一种轮毂电机驱动车辆的转矩分配的方法,通过对轮毂电机和机械制动器的输出转矩进行分配,实现车辆操纵稳定性所需的整车目标控制力和力矩。所述转矩分配方法包含以下步骤:一、采用最优控制分配方法,根据整车需求纵向合力,整车需求侧向合力以及整车需求横摆力矩,对电动轮纵向力建立最优控制分配方程;二、根据建立的电动轮纵向力最优控制分配方程,求解得到各电动轮纵向力最优解,结合电动轮输出转矩与电动轮纵向力的关系,得到电动轮输出转矩;三、根据轮毂电机转矩与机械制动器转矩的关系,得到轮毂电机输出转矩和制动器输出转矩。

一种轮毂电机驱动车辆的动力分配方法.pdf
本发明提供了一种轮毂电机驱动车辆的动力分配方法,根据车轮旋转动力学模型,采用滑模控制理论跟踪控制分配中得到的纵向力和侧向力,得到各电动轮的输出转矩与各车轮的转角,对滑移率和侧偏角进行控制,实现了对车辆的驱动、制动和转向子系统进行集成控制,避免功能重叠和结构干涉,还实现了进行车辆操纵稳定性和节能的多目标优化控制。