
一种全轮毂电机驱动车辆的驱动力控制方法.pdf

含秀****66


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全轮毂电机驱动车辆的驱动力控制方法.pdf
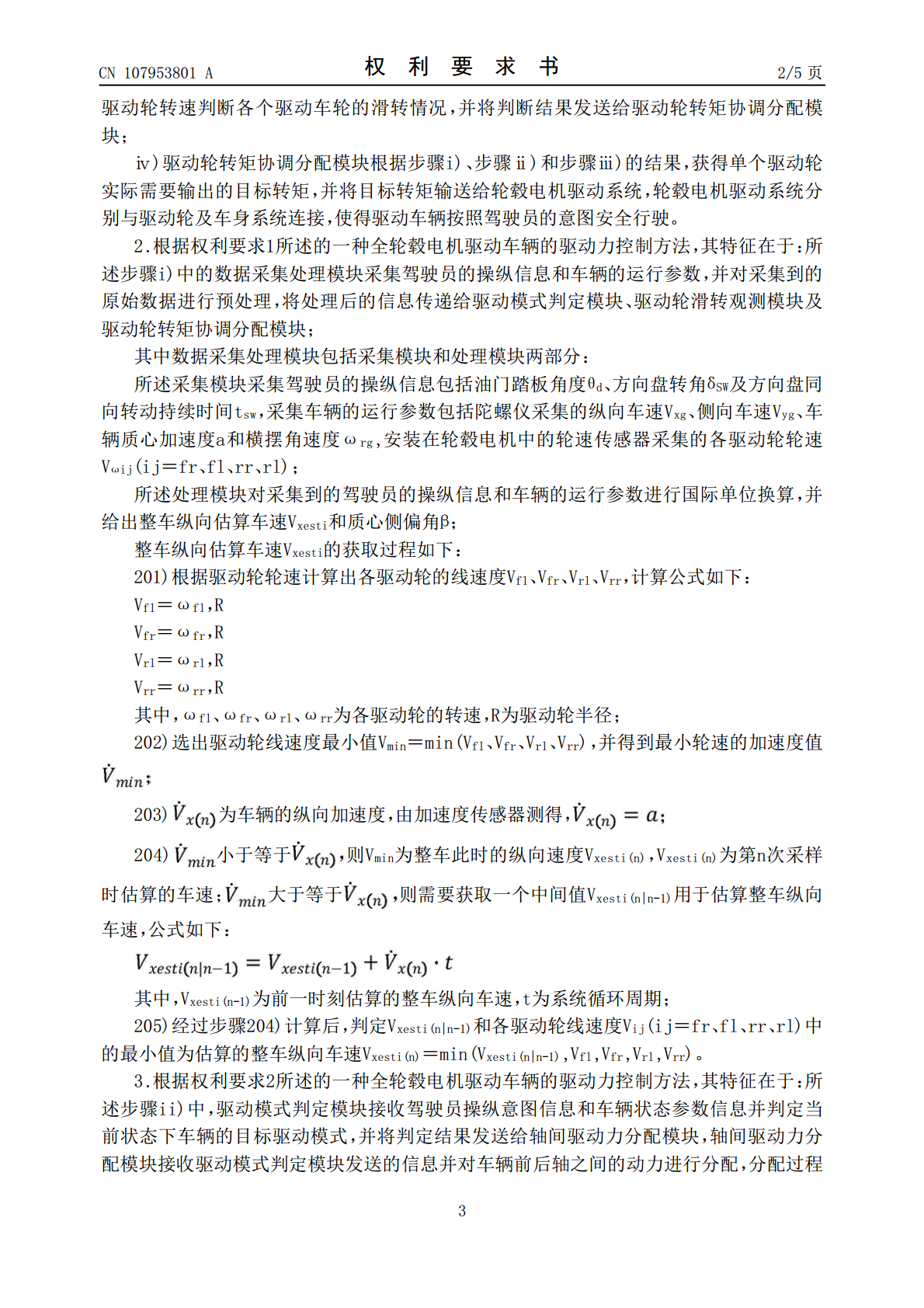
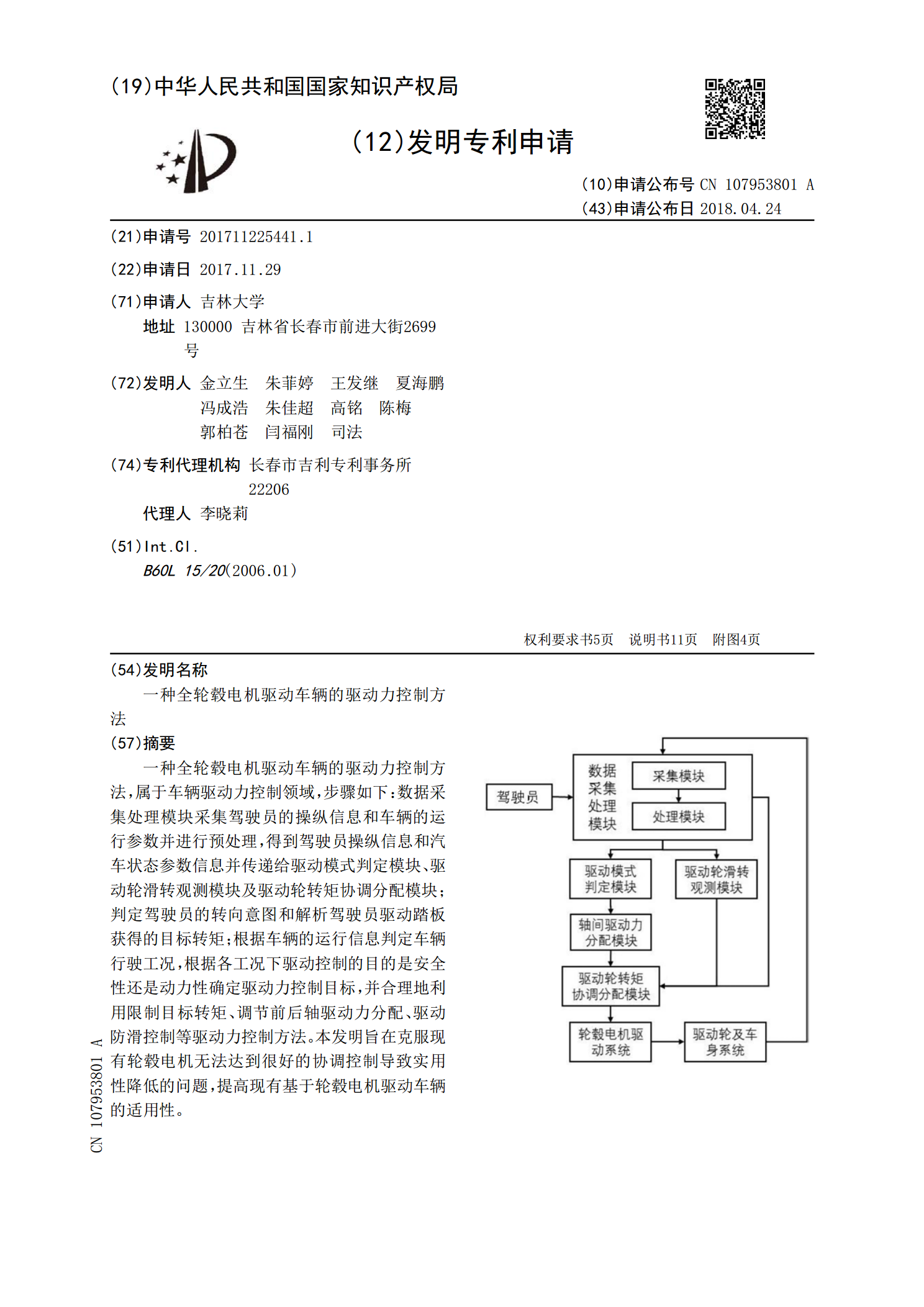
一种全轮毂电机驱动车辆的驱动力控制方法,属于车辆驱动力控制领域,步骤如下:数据采集处理模块采集驾驶员的操纵信息和车辆的运行参数并进行预处理,得到驾驶员操纵信息和汽车状态参数信息并传递给驱动模式判定模块、驱动轮滑转观测模块及驱动轮转矩协调分配模块;判定驾驶员的转向意图和解析驾驶员驱动踏板获得的目标转矩;根据车辆的运行信息判定车辆行驶工况,根据各工况下驱动控制的目的是安全性还是动力性确定驱动力控制目标,并合理地利用限制目标转矩、调节前后轴驱动力分配、驱动防滑控制等驱动力控制方法。本发明旨在克服现有轮毂电机无法
一种用于轮毂电机驱动车辆的蠕行控制方法.pdf
本发明提出了一种用于轮毂电机驱动车辆的蠕行控制方法,属于车辆动力学控制领域。该方法首先根据设定的最大蠕行坡度、起步时间和蠕行车速来确定最大蠕行扭矩限值、蠕行扭矩速度比例系数和蠕行目标车速,其中,将蠕行起步分为两阶段;然后通过确定的最大蠕行扭矩限值、蠕行扭矩速度比例系数和蠕行目标车速,采用带限值的比例控制计算得到各车轮的总扭矩,实现对车辆的蠕行控制。本发明既能保证蠕行起步时间满足要求,同时在起步过程中,在一定坡度下不溜坡、车速不超调,且车速与扭矩一致收敛,起步具有较好的平顺性,特别是针对质量较大的电动客车,

一种四轮毂电机驱动车辆的综合控制方法.pdf
一种四轮毂电机驱动车辆的综合控制方法,其结合了变预瞄距离运动学模型获取当前状态与期望轨迹的航向角偏差与侧向位移偏差,建立模型预测控制器状态方程,使被控车辆的运动状态更符合实际驾驶员操纵特性,提高轨迹跟踪的鲁棒性。在转向过程中,能够实现对横摆角速度以及质心侧偏角的控制,以及操纵稳定性与轨迹跟踪的综合控制。得到期望纵向力与期望额外横摆力矩,进而通过转矩分配算法得到四轮毂电机转矩最优控制序列。考虑底层力矩分配算法,对分布式驱动车辆轨迹跟踪与操纵稳定性相关执行器进行控制,提高了控制的准确性与鲁棒性,并实现了纵横向

一种四轮毂电机驱动车辆转向的控制方法.pdf
本发明公开了一种四轮毂电机驱动车辆转向的控制方法,包括:获取驾驶员输入信号和车辆实际动力信息;计算期望车辆质心侧偏角、期望车辆横摆角速度和期望车速;计算质心侧偏角偏差、横摆角速度偏差和车速偏差;依据质心侧偏角偏差、横摆角速度偏差和车速偏差,采用PID控制算法和模糊PID控制算法,生成虚拟控制指令;建立车辆轮胎附着利用率目标函数和车辆能量消耗目标函数;依据虚拟控制指令和目标函数建立第一层转矩分配优化函数和第二层转矩分配优化函数;利用两层转矩分配优化函数为四个轮毂电机进行转矩分配,以控制车辆转向。本发明能够在

一种用于轮毂电机驱动车辆的稳定性控制方法.pdf
本发明提供了一种用于轮毂电机驱动车辆的稳定性控制方法,基于分层控制结构设计车辆稳定性控制策略,基于非线性滑模变结构控制实现对车速、横摆角速度和质心侧偏角的非线性联合控制,基于控制分配的方法控制电机转矩,该稳定性控制策略能够明显提高车辆的操纵稳定性,相对现有技术具有非显而易见的诸多有益效果。