
一种轮式永磁吸附装置.pdf

篷璐****爱吗

1/9
2/9

3/9
4/9

5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮式永磁吸附装置.pdf
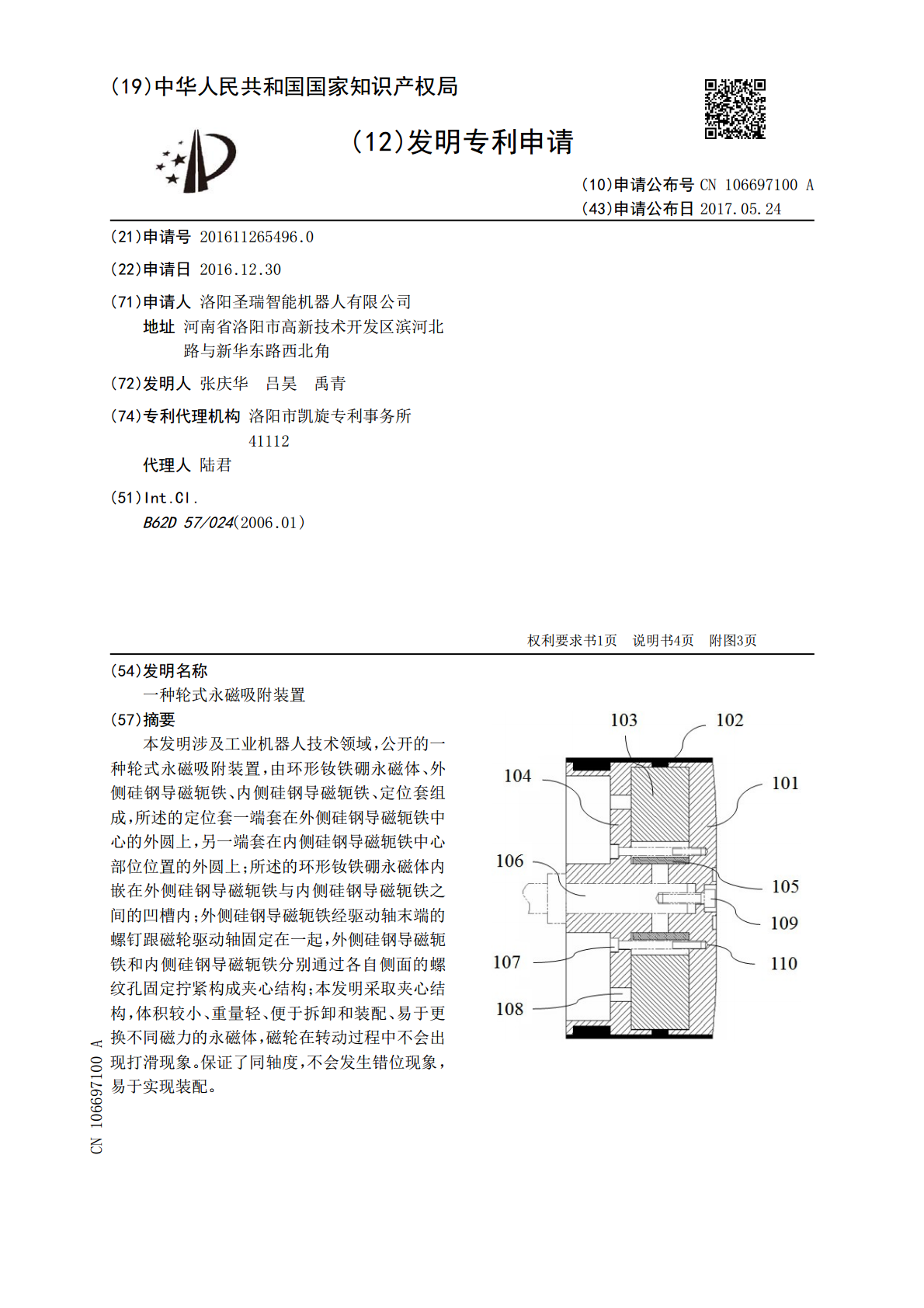
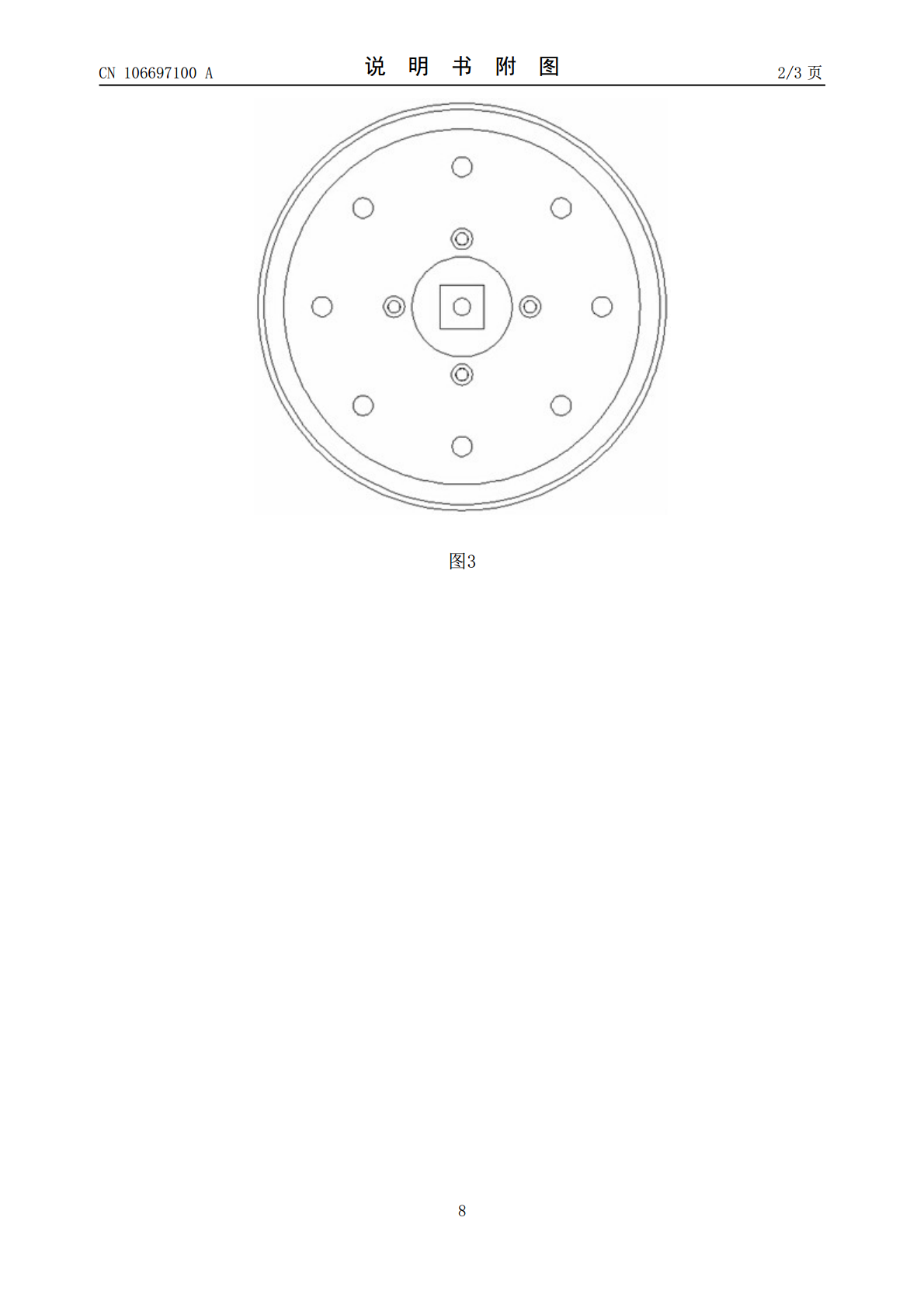
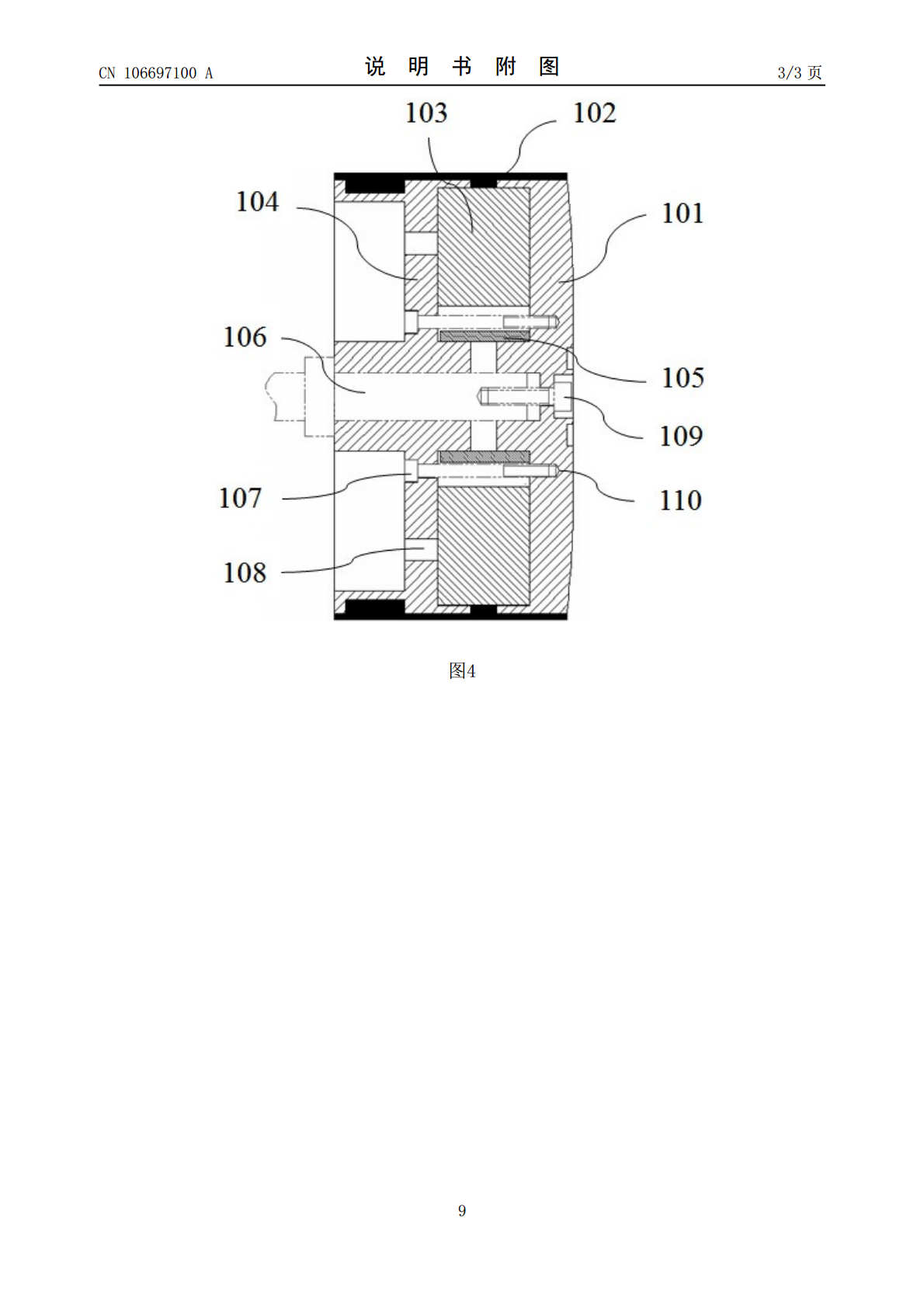
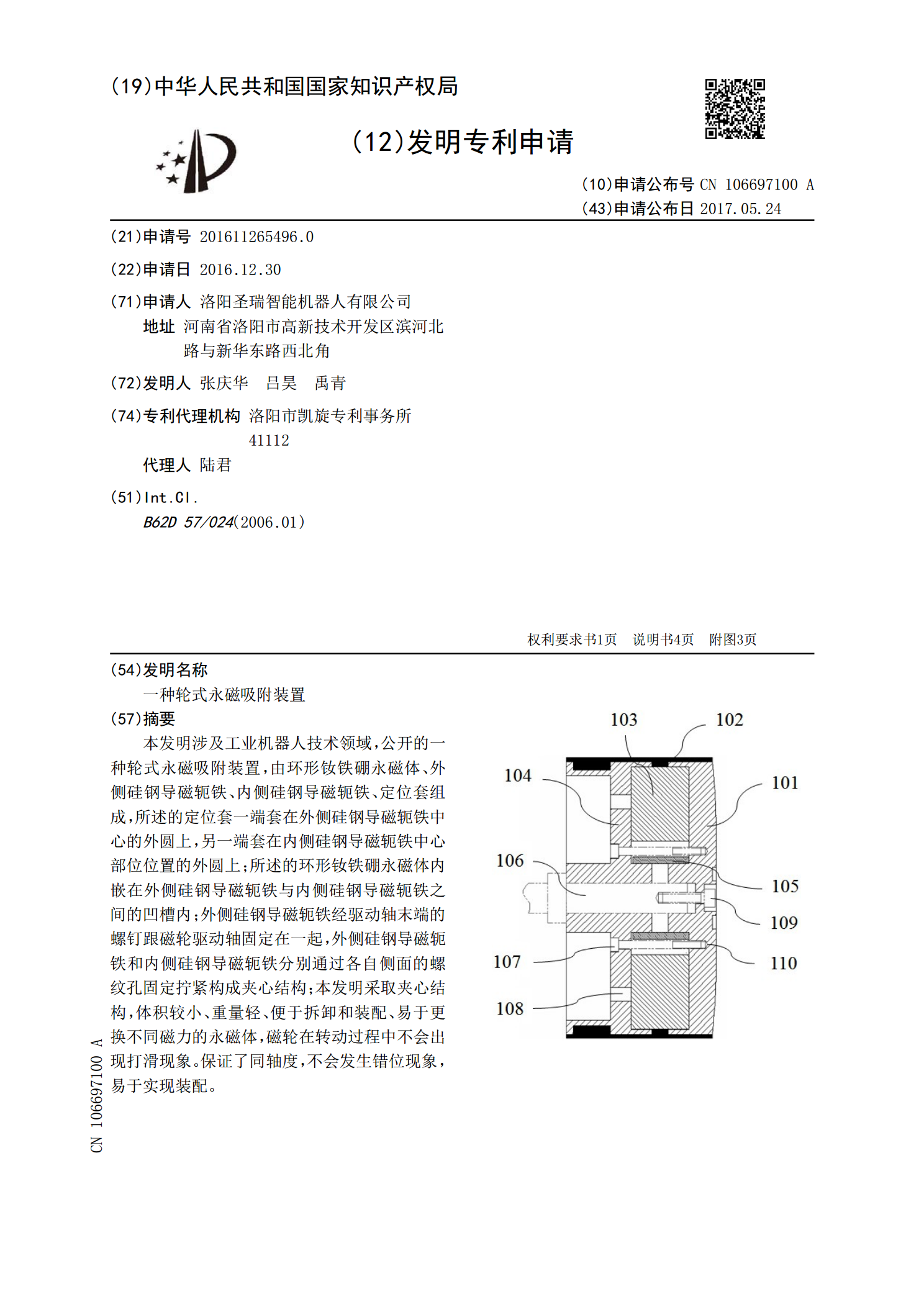
本发明涉及工业机器人技术领域,公开的一种轮式永磁吸附装置,由环形钕铁硼永磁体、外侧硅钢导磁轭铁、内侧硅钢导磁轭铁、定位套组成,所述的定位套一端套在外侧硅钢导磁轭铁中心的外圆上,另一端套在内侧硅钢导磁轭铁中心部位位置的外圆上;所述的环形钕铁硼永磁体内嵌在外侧硅钢导磁轭铁与内侧硅钢导磁轭铁之间的凹槽内;外侧硅钢导磁轭铁经驱动轴末端的螺钉跟磁轮驱动轴固定在一起,外侧硅钢导磁轭铁和内侧硅钢导磁轭铁分别通过各自侧面的螺纹孔固定拧紧构成夹心结构;本发明采取夹心结构,体积较小、重量轻、便于拆卸和装配、易于更换不同磁力的

一种永磁式曲面吸附装置.pdf
本发明公开了一种永磁式曲面吸附装置,包括复合导磁底座、中间隔磁座、上端盖、控磁开关、限位销钉、钢丝绳、导引轮和辅助吸盘:上端盖与中间隔磁座之间设有主动轴、被动轴和换向器;复合导磁底座内设有永磁体;辅助吸盘与复合导磁底座通过转轴相连,且辅助吸盘包括吸盘基体、吸盘永磁体、限位转动体、侧挡板、滑块、滑轨、弹簧和齿轮;钢丝绳一端与所述辅助吸盘内的滑块相连,另一端通过导引轮卷绕于所述换向器的输出轴。该装置利用多个永磁体作为吸附体对曲面进行吸附,避免了电磁铁吸附时可能出现的意外情况,同时,该装置能够实现单轴多吸盘联动
一种轮式悬磁吸附装置.pdf
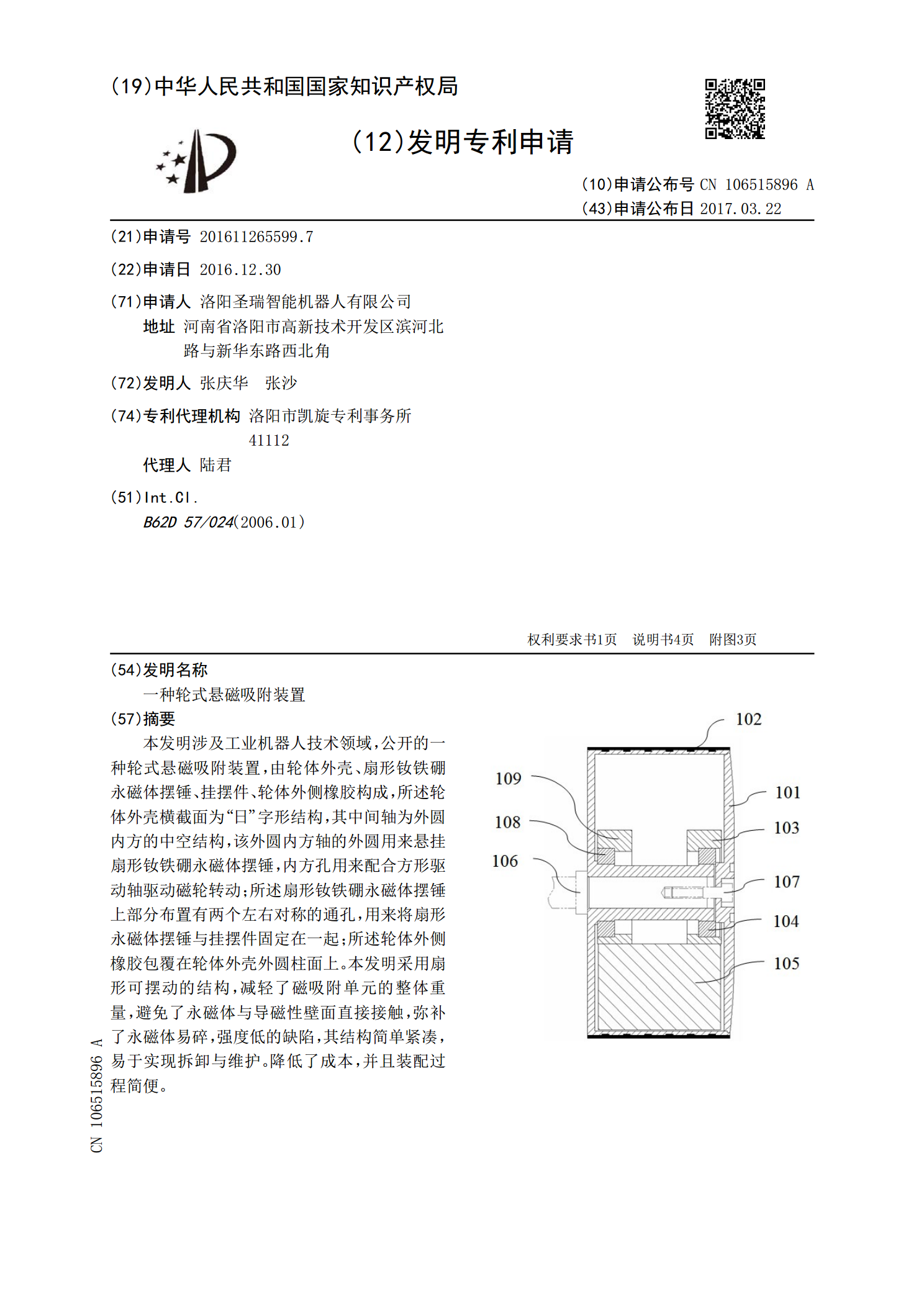
本发明涉及工业机器人技术领域,公开的一种轮式悬磁吸附装置,由轮体外壳、扇形钕铁硼永磁体摆锤、挂摆件、轮体外侧橡胶构成,所述轮体外壳横截面为“日”字形结构,其中间轴为外圆内方的中空结构,该外圆内方轴的外圆用来悬挂扇形钕铁硼永磁体摆锤,内方孔用来配合方形驱动轴驱动磁轮转动;所述扇形钕铁硼永磁体摆锤上部分布置有两个左右对称的通孔,用来将扇形永磁体摆锤与挂摆件固定在一起;所述轮体外侧橡胶包覆在轮体外壳外圆柱面上。本发明采用扇形可摆动的结构,减轻了磁吸附单元的整体重量,避免了永磁体与导磁性壁面直接接触,弥补了永磁体

一种吸附力可调节永磁间隙吸附装置.pdf
一种吸附力可调永磁间隙吸附装置,包括磁铁调节手柄、磁铁凸轮轴、磁铁凸轮轴套、磁铁传动板、磁座、永磁铁、磁座轴承座、磁座轴;永磁铁通过磁铁传动板固定安装在磁座中,磁座通过磁座轴承座与支承底盘相连接,且可以绕磁座轴转动;磁铁调节手柄与磁铁凸轮轴相连接,转动磁铁调节手柄即可实现吸附装置与导磁工件之间磁吸附力。本发明可以安装于在磁性工件上移动机器人平台,提高移动机器人平台的静态和动态稳定性,同时,吸附力可调节使移动机器人平台的搬运更方便、省力,降低工人的劳动强度。
永磁吸附式轮式爬壁机器人.pdf
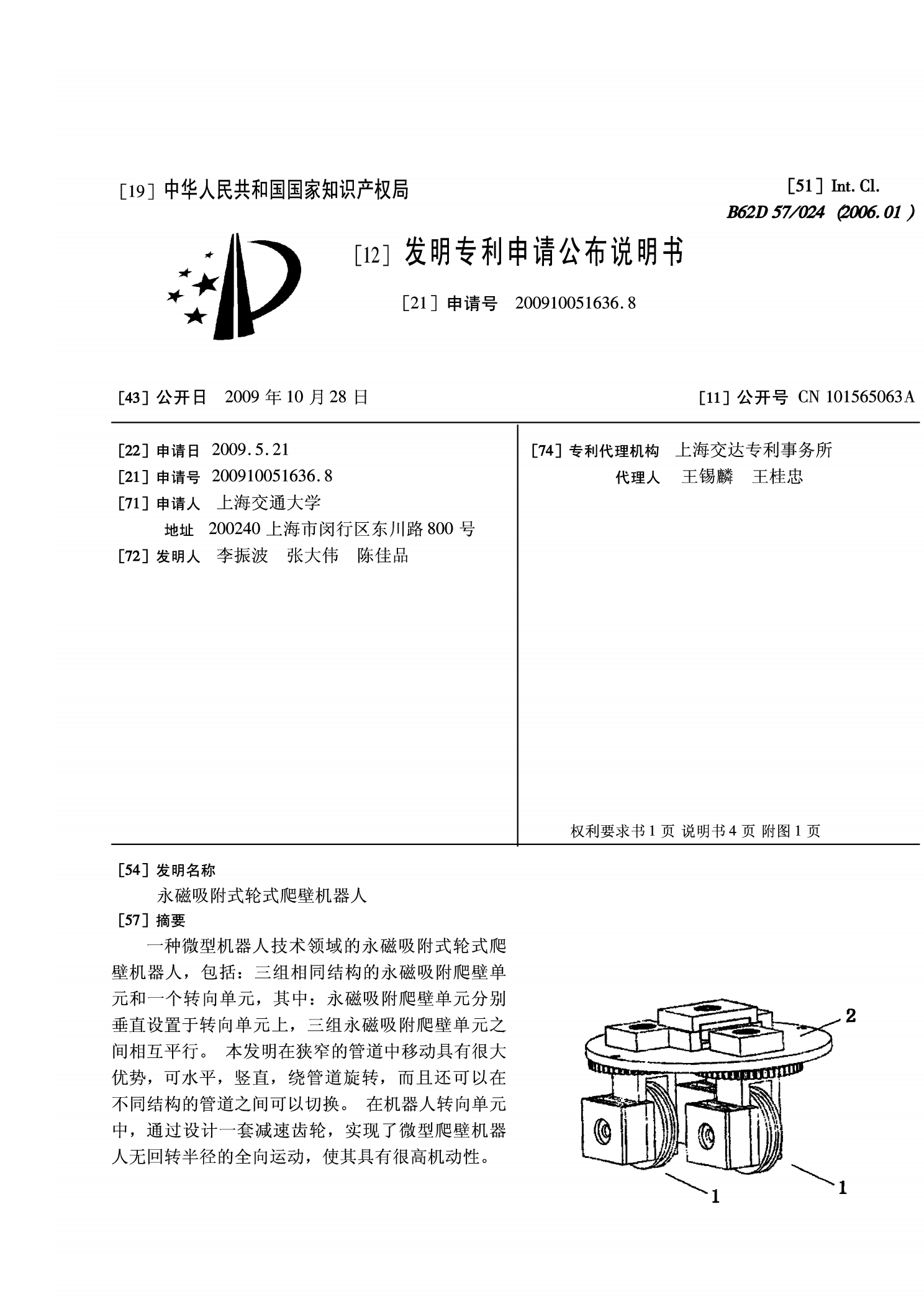
一种微型机器人技术领域的永磁吸附式轮式爬壁机器人,包括:三组相同结构的永磁吸附爬壁单元和一个转向单元,其中:永磁吸附爬壁单元分别垂直设置于转向单元上,三组永磁吸附爬壁单元之间相互平行。本发明在狭窄的管道中移动具有很大优势,可水平,竖直,绕管道旋转,而且还可以在不同结构的管道之间可以切换。在机器人转向单元中,通过设计一套减速齿轮,实现了微型爬壁机器人无回转半径的全向运动,使其具有很高机动性。