
永磁吸附式轮式爬壁机器人.pdf

增梅****主啊


1/7

2/7

3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
永磁吸附式轮式爬壁机器人.pdf
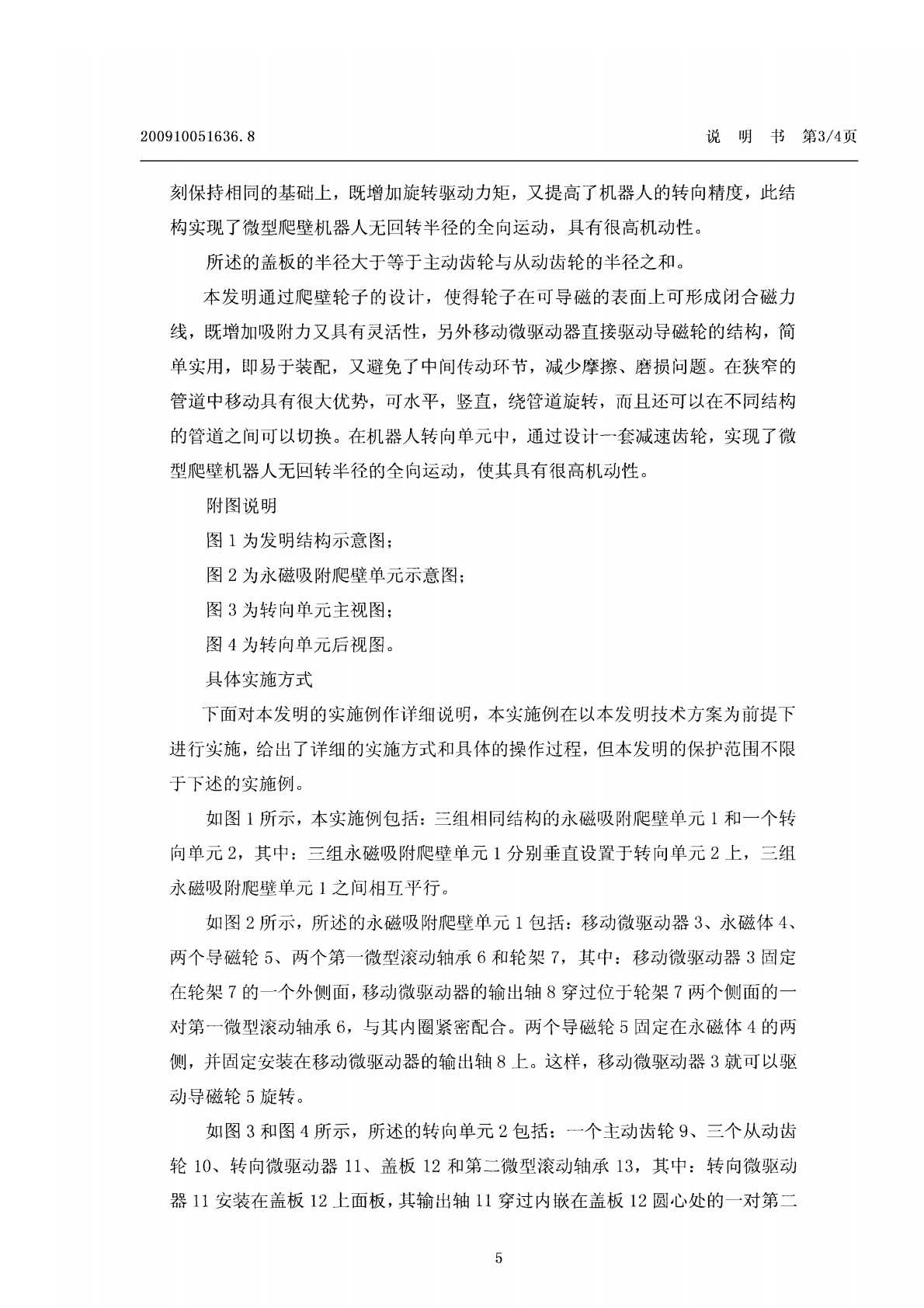
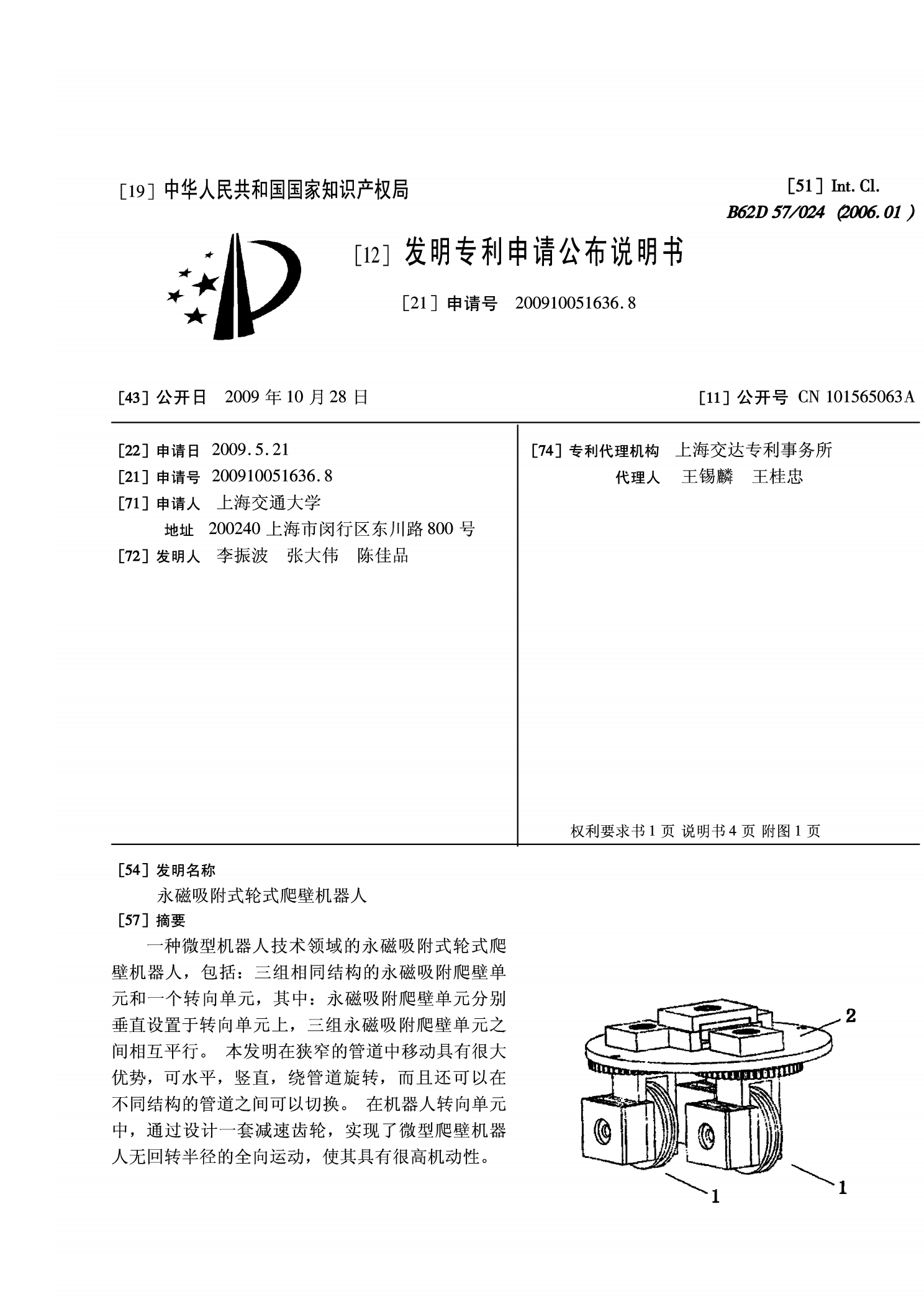
一种微型机器人技术领域的永磁吸附式轮式爬壁机器人,包括:三组相同结构的永磁吸附爬壁单元和一个转向单元,其中:永磁吸附爬壁单元分别垂直设置于转向单元上,三组永磁吸附爬壁单元之间相互平行。本发明在狭窄的管道中移动具有很大优势,可水平,竖直,绕管道旋转,而且还可以在不同结构的管道之间可以切换。在机器人转向单元中,通过设计一套减速齿轮,实现了微型爬壁机器人无回转半径的全向运动,使其具有很高机动性。

永磁吸附轮式爬壁机器人受力及功耗分析.docx
永磁吸附轮式爬壁机器人受力及功耗分析永磁吸附轮式爬壁机器人是一种能够在垂直壁面上自由移动的机器人。它通过利用永磁吸附器件与壁面之间的吸附力来实现爬壁功能。在机器人的运行过程中,受力和功耗是机器人设计和优化的关键问题。本文旨在对永磁吸附轮式爬壁机器人的受力和功耗进行分析和研究。首先,我们来分析永磁吸附轮式爬壁机器人的受力情况。机器人在壁面上移动时,需要克服重力和摩擦力的作用。重力是机器人受到的外界作用力,可以通过机器人的质量和重力加速度计算得到。摩擦力是机器人与壁面之间产生的摩擦作用力,其大小与壁面材料的摩
永磁轮式爬壁机器人.pdf
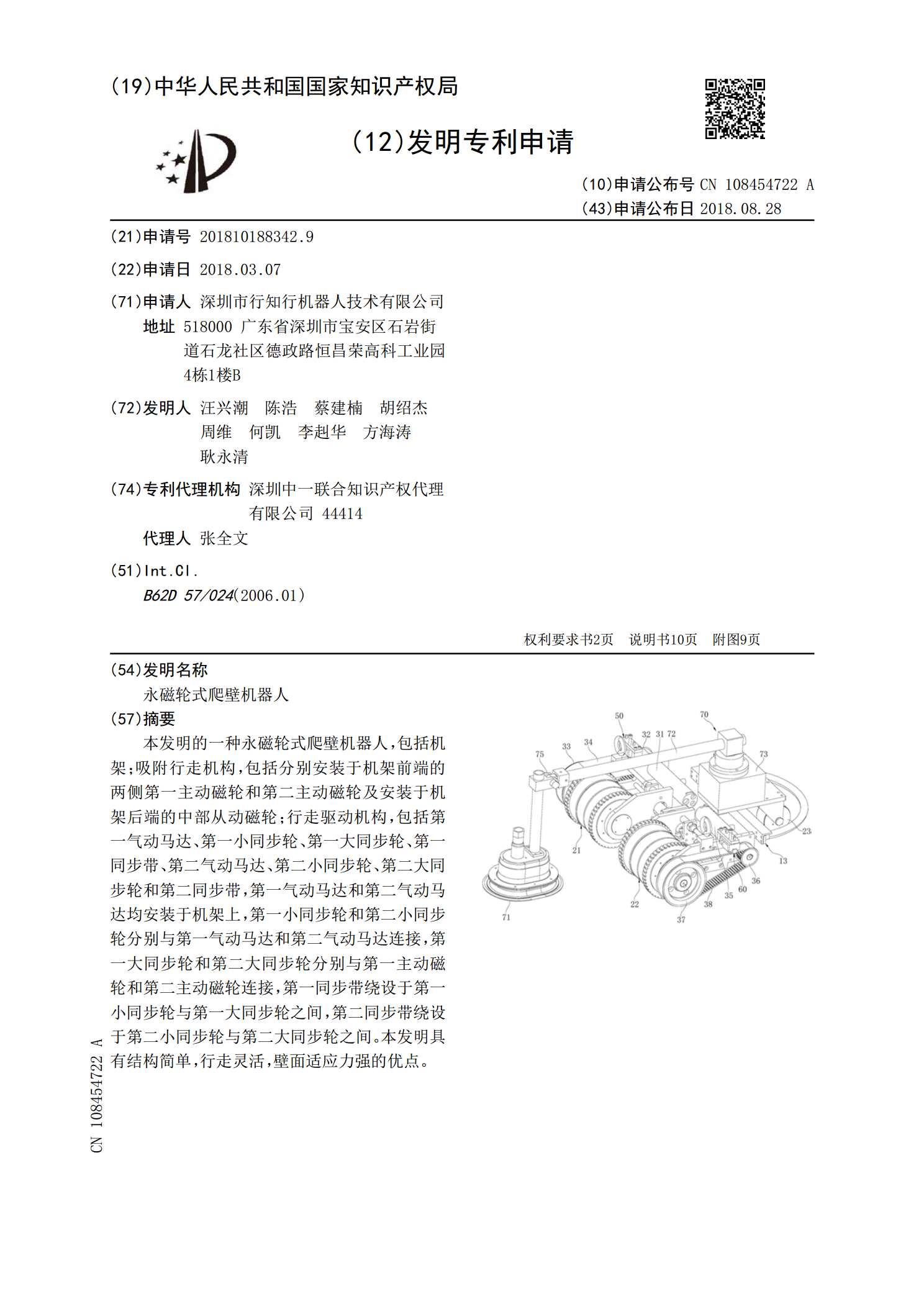
本发明的一种永磁轮式爬壁机器人,包括机架;吸附行走机构,包括分别安装于机架前端的两侧第一主动磁轮和第二主动磁轮及安装于机架后端的中部从动磁轮;行走驱动机构,包括第一气动马达、第一小同步轮、第一大同步轮、第一同步带、第二气动马达、第二小同步轮、第二大同步轮和第二同步带,第一气动马达和第二气动马达均安装于机架上,第一小同步轮和第二小同步轮分别与第一气动马达和第二气动马达连接,第一大同步轮和第二大同步轮分别与第一主动磁轮和第二主动磁轮连接,第一同步带绕设于第一小同步轮与第一大同步轮之间,第二同步带绕设于第二小同
用于永磁吸附爬壁机器人的磁轮.pdf
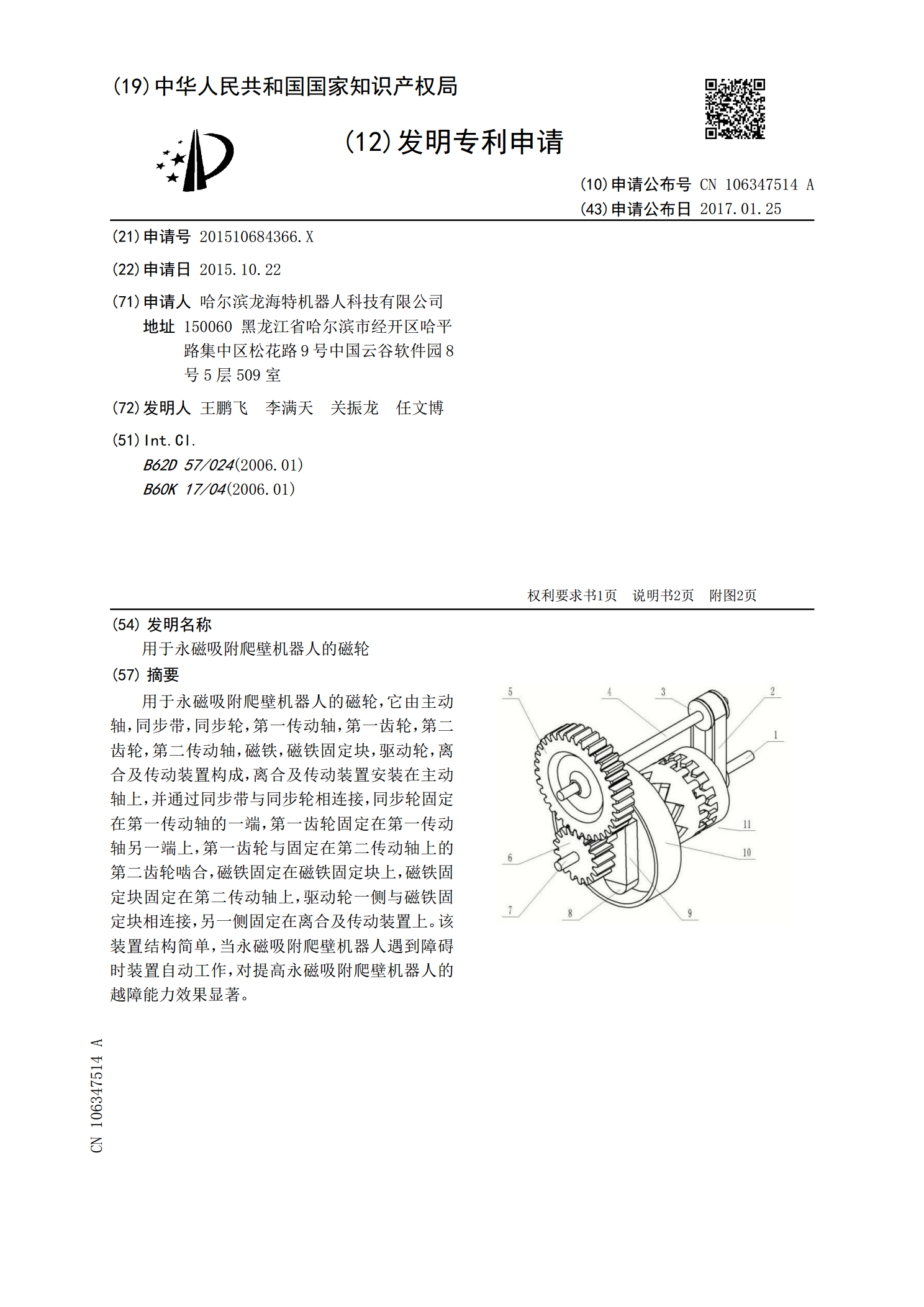
用于永磁吸附爬壁机器人的磁轮,它由主动轴,同步带,同步轮,第一传动轴,第一齿轮,第二齿轮,第二传动轴,磁铁,磁铁固定块,驱动轮,离合及传动装置构成,离合及传动装置安装在主动轴上,并通过同步带与同步轮相连接,同步轮固定在第一传动轴的一端,第一齿轮固定在第一传动轴另一端上,第一齿轮与固定在第二传动轴上的第二齿轮啮合,磁铁固定在磁铁固定块上,磁铁固定块固定在第二传动轴上,驱动轮一侧与磁铁固定块相连接,另一侧固定在离合及传动装置上。该装置结构简单,当永磁吸附爬壁机器人遇到障碍时装置自动工作,对提高永磁吸附爬壁机器

一种轮式磁吸附爬壁机器人.pdf
本发明公开了一种轮式磁吸附爬壁机器人,属于机器人技术领域。其包括车体、车轮模块及吸附模块;车体包括车架及车轮搭载平台,车轮搭载平台包括自适应车轮搭载平台及固定式车轮搭载平台,固定式车轮搭载平台与所述车架连接,自适应车轮搭载平台通过转动机构与车架连接;转动机构包括转轴、转轴支撑架及扭簧;车轮模块包括车轮、RV减速机及步进电机;吸附模块包括多个用于将机器人吸附到作业圆柱壁面的吸附磁条。本发明采用永磁吸附形式与四轮四驱传动结构,结构简单,机器人能够自适应贴合不同曲率半径的导磁壁面,极大的提高了工作效率,保证爬壁