
基于双伺服电机的减速驱动装置、驱动系统及控制方法.pdf

听云****君哇


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双伺服电机的减速驱动装置、驱动系统及控制方法.pdf
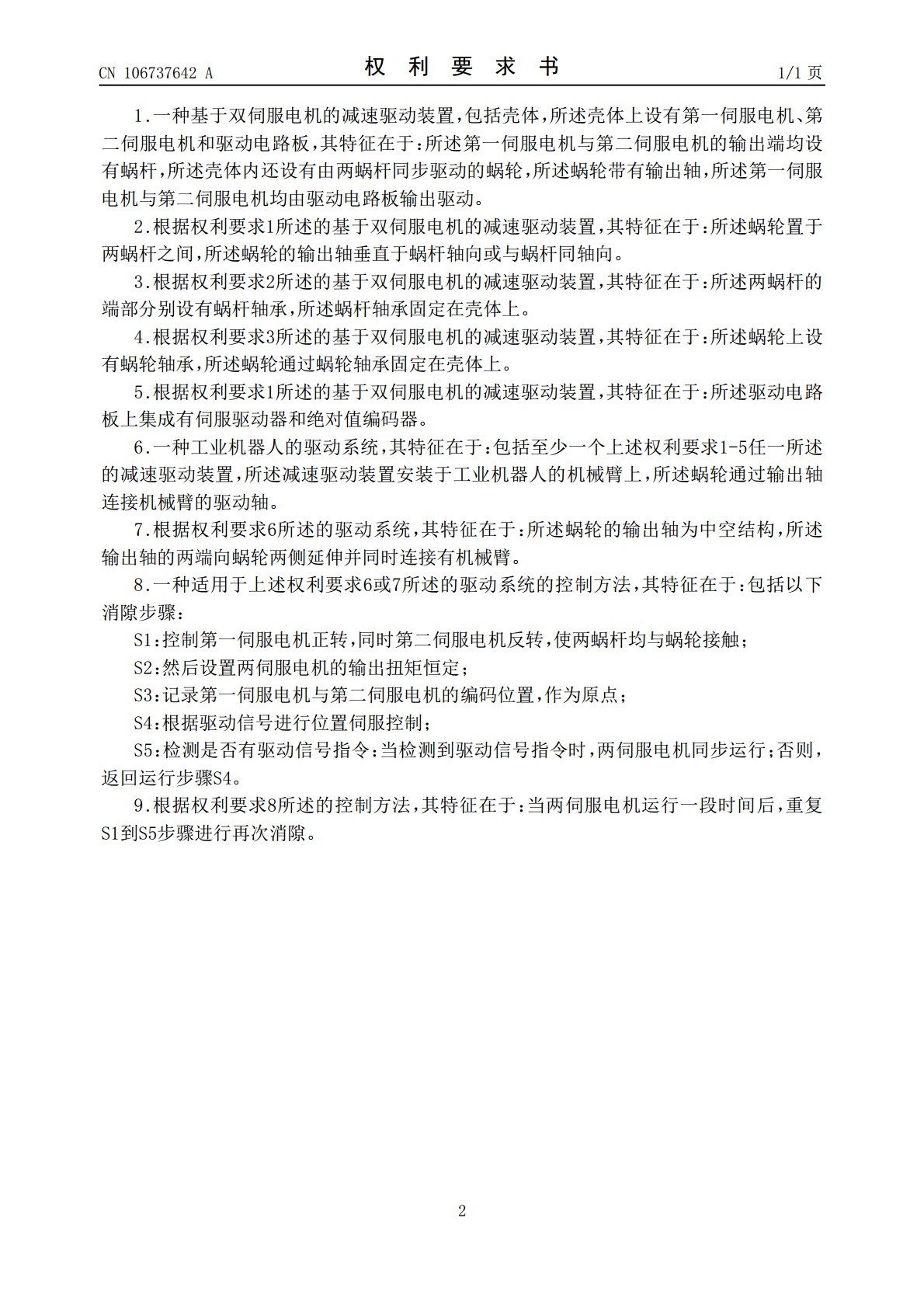
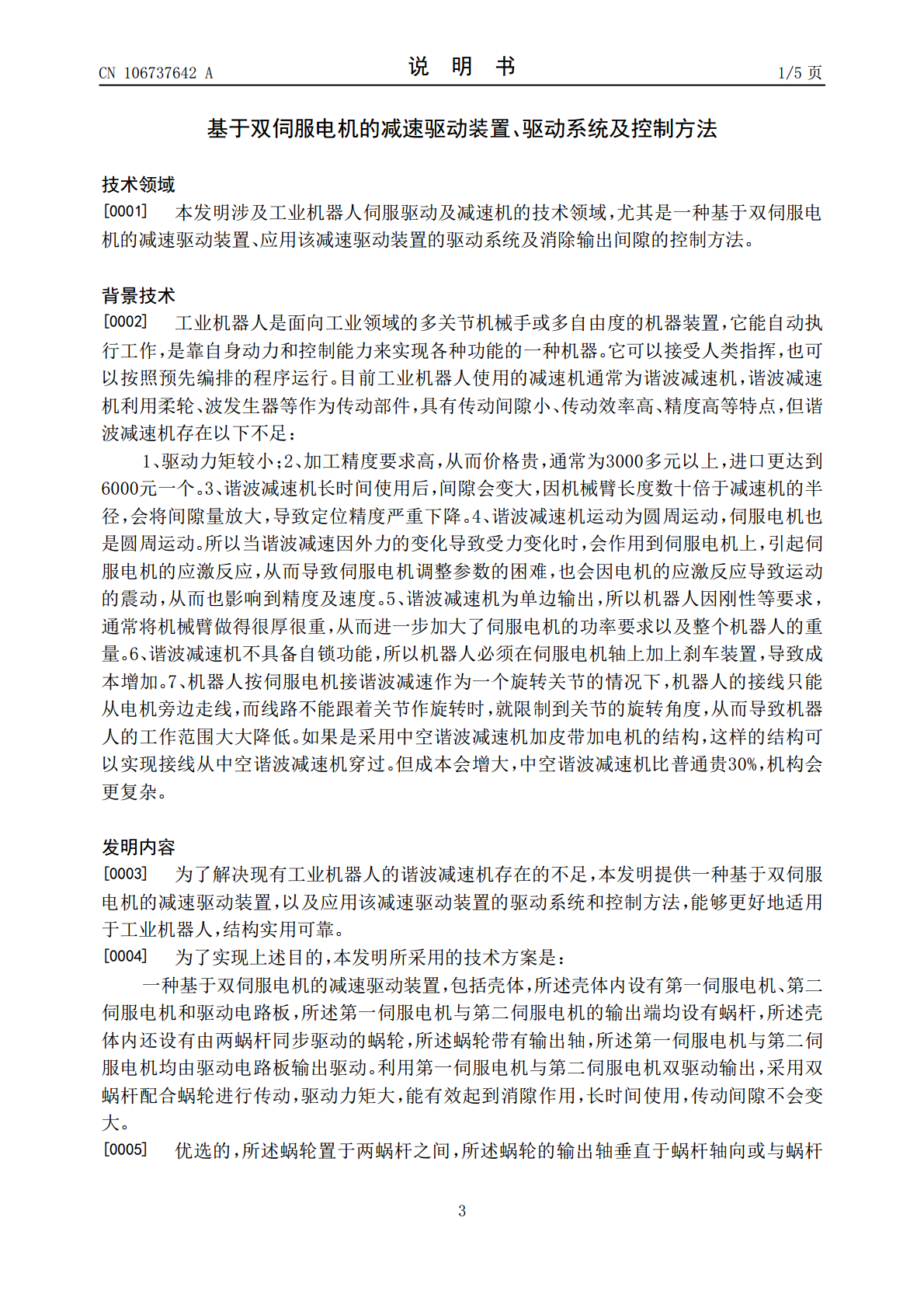
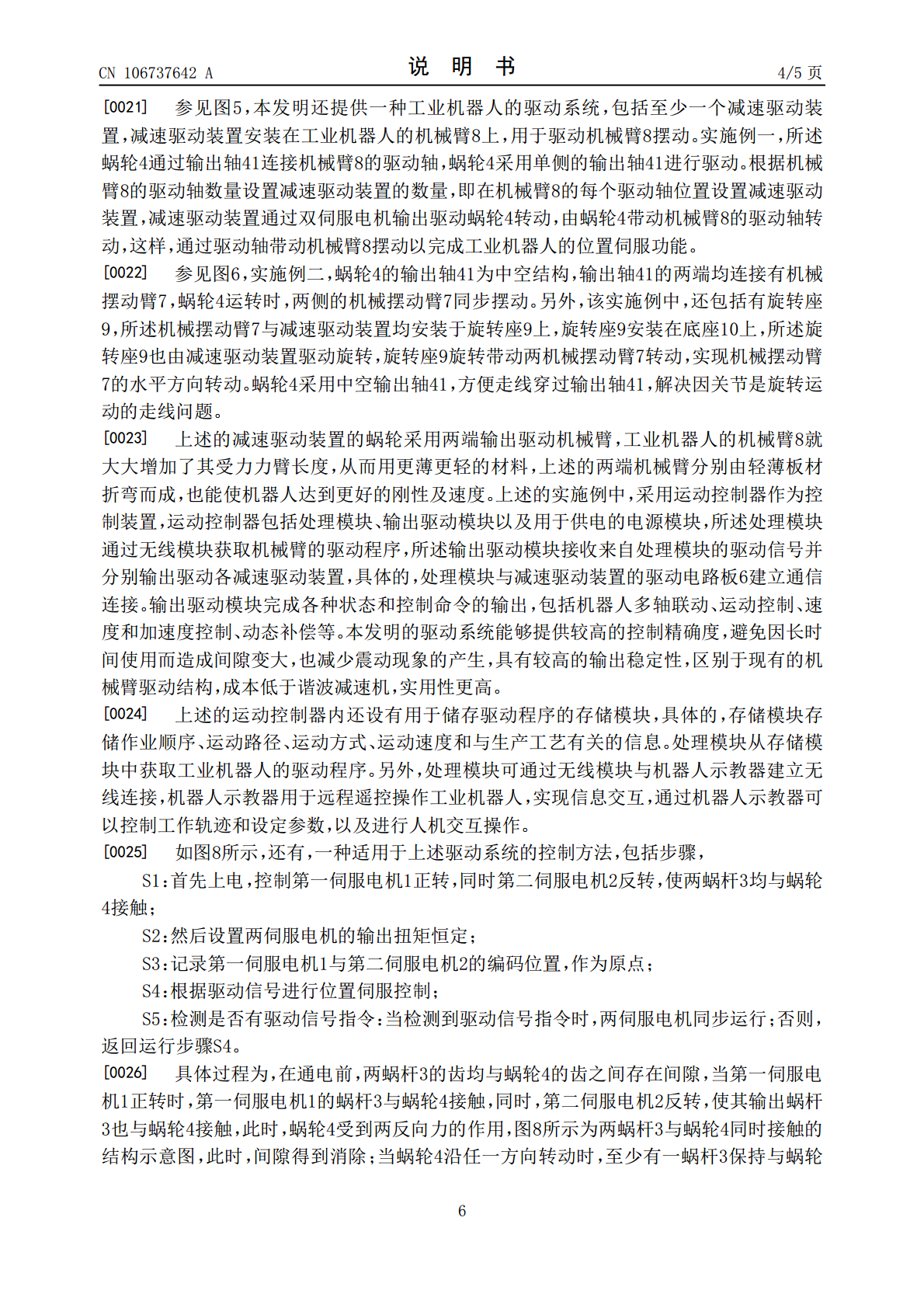
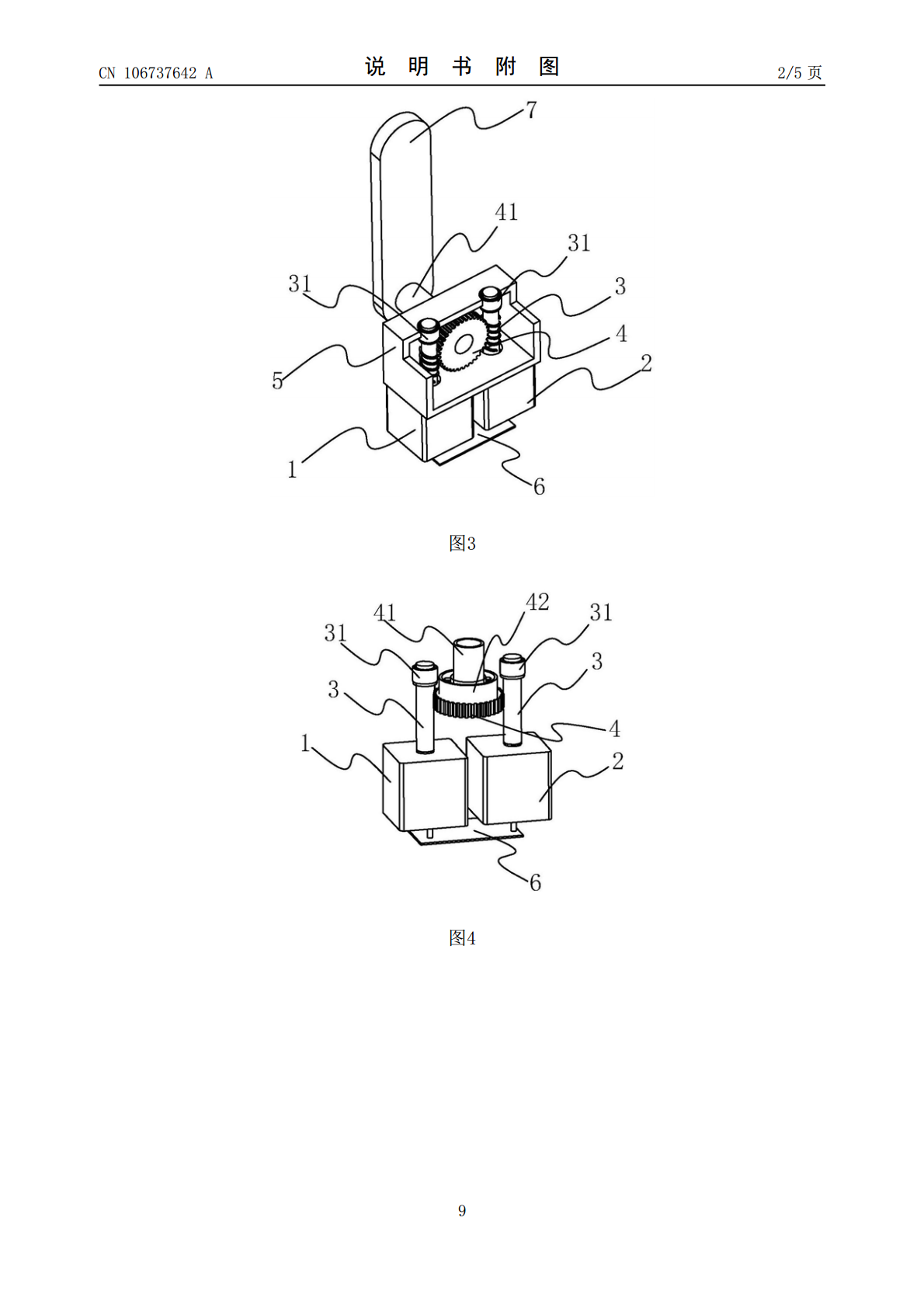
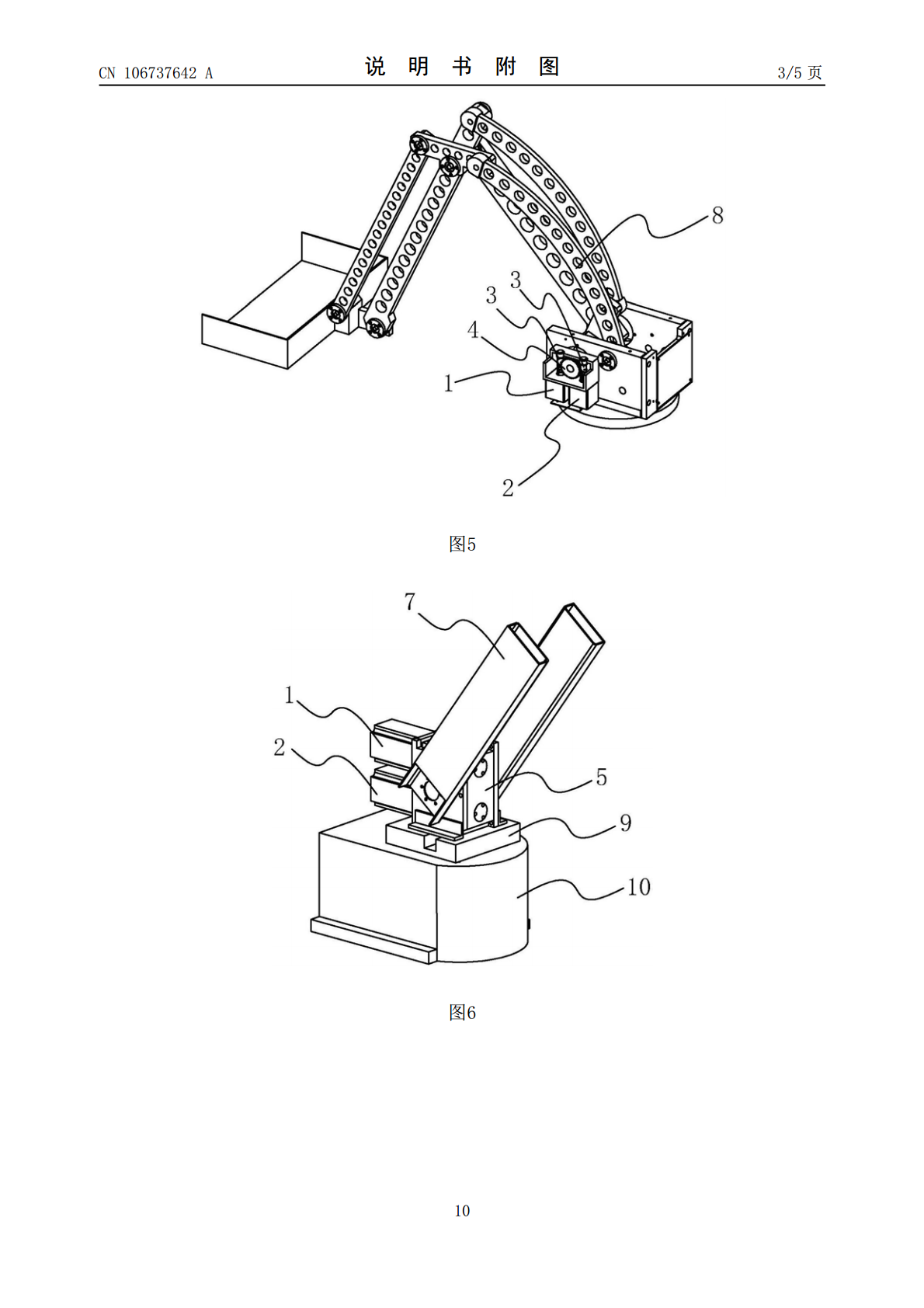
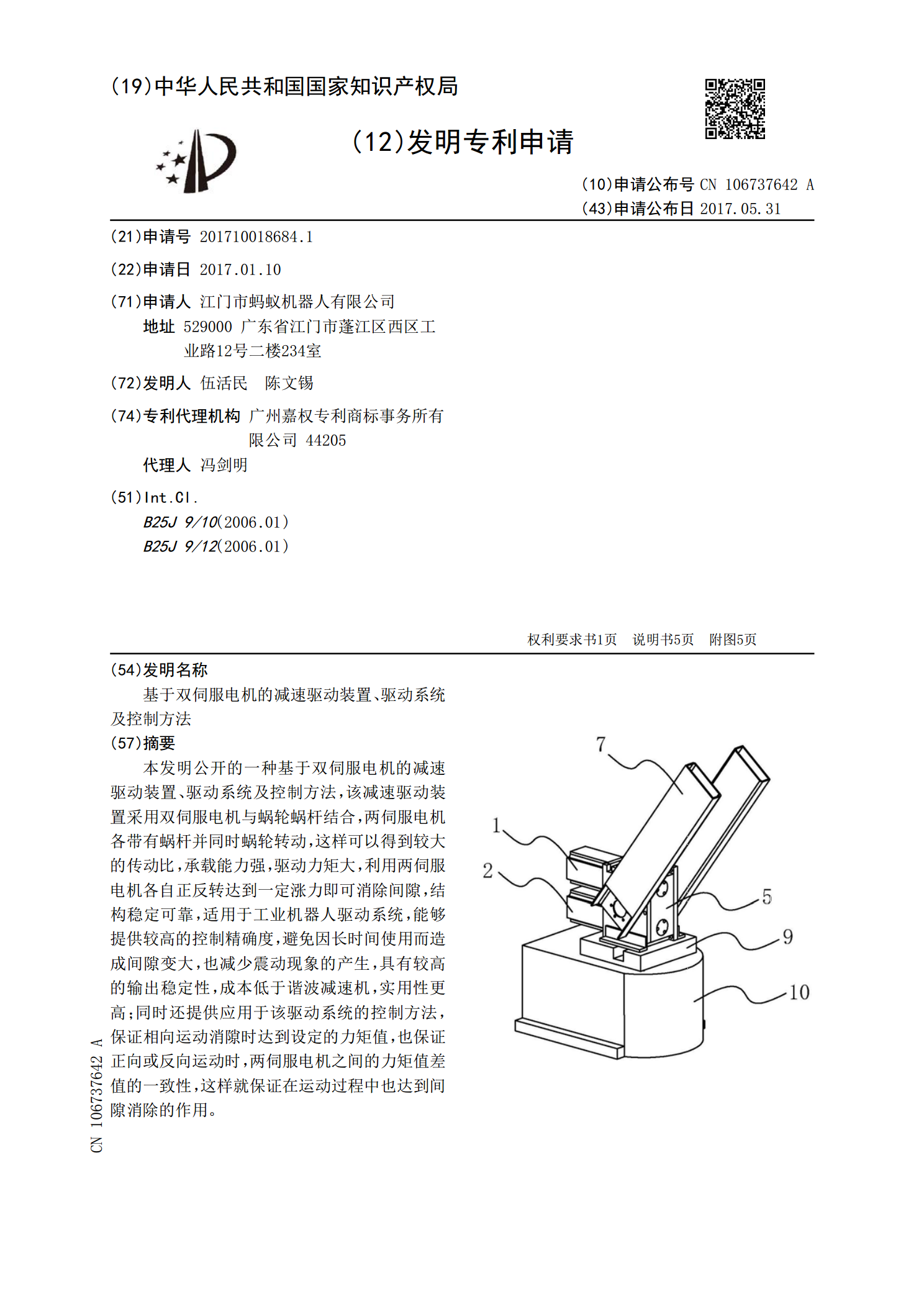
本发明公开的一种基于双伺服电机的减速驱动装置、驱动系统及控制方法,该减速驱动装置采用双伺服电机与蜗轮蜗杆结合,两伺服电机各带有蜗杆并同时蜗轮转动,这样可以得到较大的传动比,承载能力强,驱动力矩大,利用两伺服电机各自正反转达到一定涨力即可消除间隙,结构稳定可靠,适用于工业机器人驱动系统,能够提供较高的控制精确度,避免因长时间使用而造成间隙变大,也减少震动现象的产生,具有较高的输出稳定性,成本低于谐波减速机,实用性更高;同时还提供应用于该驱动系统的控制方法,保证相向运动消隙时达到设定的力矩值,也保证正向或反向

双电机驱动伺服系统控制方法研究.docx
双电机驱动伺服系统控制方法研究摘要:随着科技的不断发展和进步,控制系统在电子领域得到了广泛的应用,尤其是在制造业和工业领域。本文研究了双电机驱动伺服系统的控制方法,其中包括传统PID控制和模糊控制两种方法。通过实验对比两种控制方法的性能,在实际应用中,采用模糊控制实现双电机驱动伺服系统的优越性能和较高的稳定性。关键词:控制系统,伺服系统,双电机驱动,PID控制,模糊控制一、绪论双电机驱动伺服系统是一种利用电机驱动系统来实现精准位置控制的技术。该系统适合需要高速定位和高精度控制的场合,例如《1》人工砣称或数

双联电机驱动装置及其内变速双联电机与离合减速驱动装置.pdf
一种双联电机驱动装置及其内变速双联电机与离合减速驱动装置,所述双联电机驱动装置,其包含主驱动马达,其具有驱动转轴,而驱动转轴的前端设有转向传动齿轮;输出模块,其对应套设于转向传动齿轮上,其中输出模块具有换向驱动轴,换向驱动轴受转向传动齿轮的驱动而旋转;离合减速驱动装置,其对应套设于主驱动马达的驱动转轴的后端并可于单向上与驱动转轴卡制而呈同轴共转;及辅助驱动马达,其具有驱动轴,驱动轴对应穿入离合减速驱动装置,进而可驱动离合减速驱动装置于单向上驱动驱动转轴旋转。
电机驱动控制装置及电机驱动控制装置的控制方法.pdf
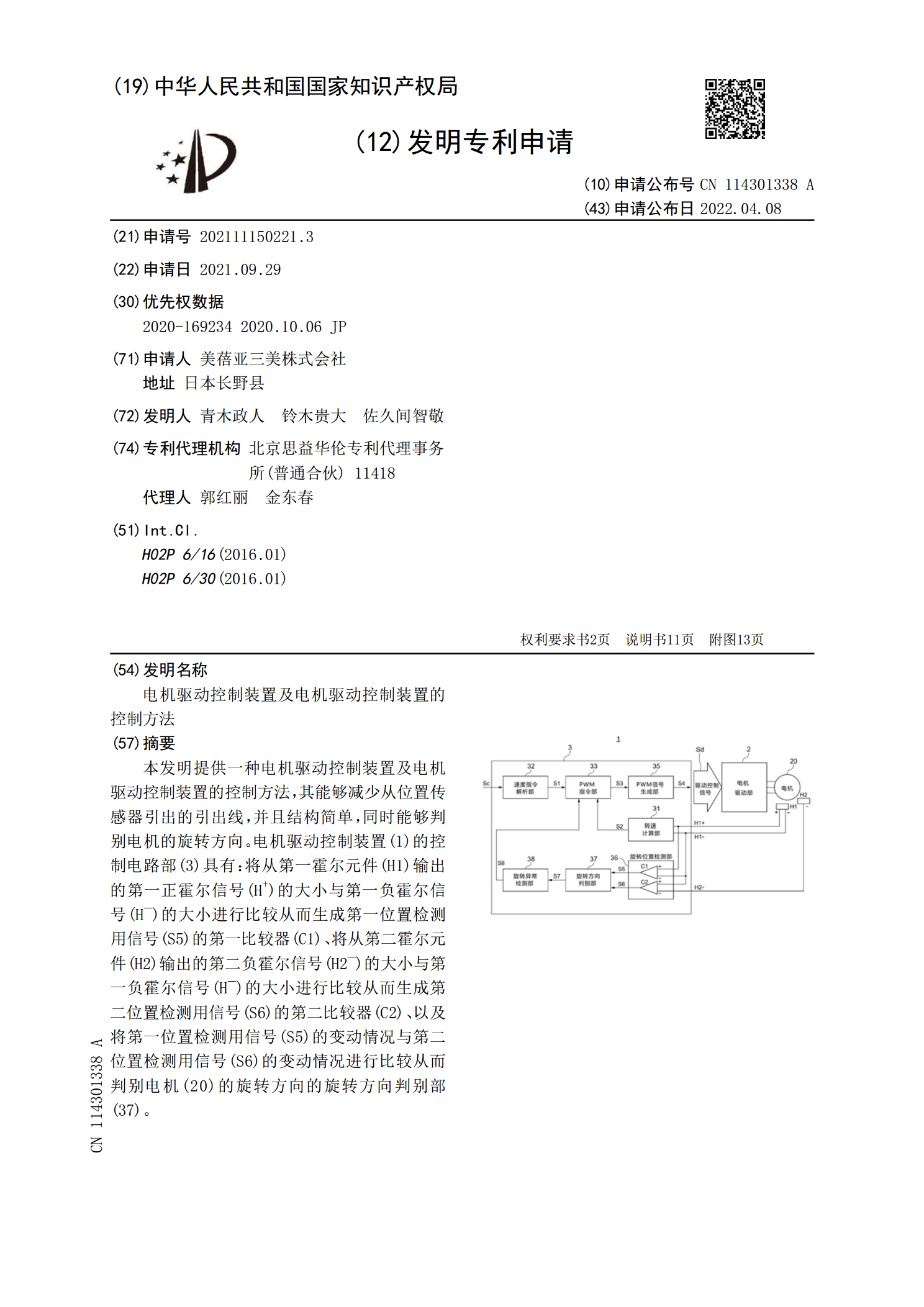
本发明提供一种电机驱动控制装置及电机驱动控制装置的控制方法,其能够减少从位置传感器引出的引出线,并且结构简单,同时能够判别电机的旋转方向。电机驱动控制装置(1)的控制电路部(3)具有:将从第一霍尔元件(H1)输出的第一正霍尔信号(H<base:Sup>+</base:Sup>)的大小与第一负霍尔信号(H<base:Sup>-</base:Sup>)的大小进行比较从而生成第一位置检测用信号(S5)的第一比较器(C1)、将从第二霍尔元件(H2)输出的第二负霍尔信号(H2<base:Sup>-</base:Su

基于EtherCAT通信的双伺服电机同步驱动系统研究.docx
基于EtherCAT通信的双伺服电机同步驱动系统研究基于EtherCAT通信的双伺服电机同步驱动系统研究摘要:随着工业自动化的快速发展,双伺服电机同步驱动系统在多个领域得到广泛应用。而基于EtherCAT通信的双伺服电机同步驱动系统在实现高精度、高效率控制方面具有独特优势。本文以EtherCAT通信技术为基础,对双伺服电机同步驱动系统的设计原理与实现方法进行了研究,并结合实际应用案例进行了验证。研究结果表明,基于EtherCAT通信的双伺服电机同步驱动系统具有稳定性好、实时性高、扩展性强等优点,适用于各类