
基于EtherCAT通信的双伺服电机同步驱动系统研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于EtherCAT通信的双伺服电机同步驱动系统研究.docx
基于EtherCAT通信的双伺服电机同步驱动系统研究基于EtherCAT通信的双伺服电机同步驱动系统研究摘要:随着工业自动化的快速发展,双伺服电机同步驱动系统在多个领域得到广泛应用。而基于EtherCAT通信的双伺服电机同步驱动系统在实现高精度、高效率控制方面具有独特优势。本文以EtherCAT通信技术为基础,对双伺服电机同步驱动系统的设计原理与实现方法进行了研究,并结合实际应用案例进行了验证。研究结果表明,基于EtherCAT通信的双伺服电机同步驱动系统具有稳定性好、实时性高、扩展性强等优点,适用于各类

基于EtherCAT通信的双伺服电机同步驱动系统研究的开题报告.docx
基于EtherCAT通信的双伺服电机同步驱动系统研究的开题报告一、选题背景与意义随着工业自动化与信息化的不断提升,控制系统对于高精度与高速度运动的要求越来越高,而伺服电机的应用在许多领域都得到了广泛推广,例如机器人、自动化生产线等。为了提高控制精度和运动速度,如何实现多个伺服电机的同步运动成为了研究热点。然而传统的电机同步驱动方案采用的是单一控制器与内部的转子位置估算器,这种方法由于转子的“延迟”而产生误差,难以满足高精度同步驱动的需求。因此,本文选取EtherCAT通信技术来实现多个伺服电机的同步驱动。

基于EtherCAT的伺服电机控制和应用.docx
基于EtherCAT的伺服电机控制和应用引言伺服电机作为一种高精度、高性能的电动机在工业自动化和机器人领域得到了广泛应用。伺服电机的控制系统扮演着重要的角色,直接影响伺服电机的性能。在伺服电机控制系统中,使用EtherCAT总线实现分布式控制已成为一种趋势。本文主要介绍EtherCAT技术及其在伺服电机控制中的应用。一、EtherCAT技术1.什么是EtherCATEtherCAT(EthernetforControlAutomationTechnology)是一种高性能实时以太网通信技术。主要应用于工业
基于双伺服电机的减速驱动装置、驱动系统及控制方法.pdf
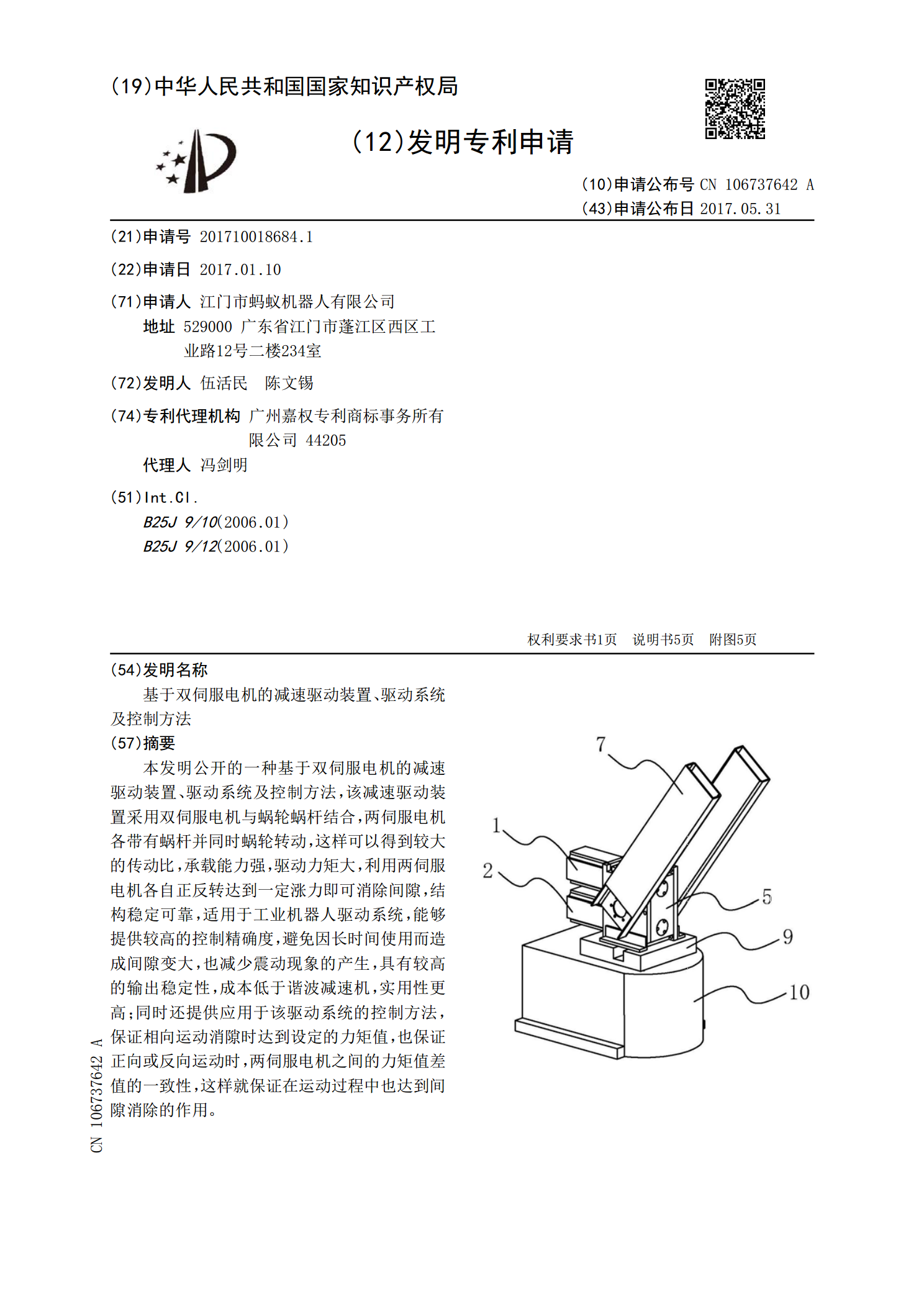
本发明公开的一种基于双伺服电机的减速驱动装置、驱动系统及控制方法,该减速驱动装置采用双伺服电机与蜗轮蜗杆结合,两伺服电机各带有蜗杆并同时蜗轮转动,这样可以得到较大的传动比,承载能力强,驱动力矩大,利用两伺服电机各自正反转达到一定涨力即可消除间隙,结构稳定可靠,适用于工业机器人驱动系统,能够提供较高的控制精确度,避免因长时间使用而造成间隙变大,也减少震动现象的产生,具有较高的输出稳定性,成本低于谐波减速机,实用性更高;同时还提供应用于该驱动系统的控制方法,保证相向运动消隙时达到设定的力矩值,也保证正向或反向

基于EtherCAT的伺服运动控制系统研究.docx
基于EtherCAT的伺服运动控制系统研究基于EtherCAT的伺服运动控制系统研究摘要:随着工业自动化的发展,伺服运动控制系统在工业生产中发挥着越来越重要的作用。而基于EtherCAT总线的伺服运动控制系统具有实时性能好、通信速度快、可扩展性强等优势,成为当前工业领域的研究热点。本论文通过对EtherCAT总线的介绍,详细阐述了基于EtherCAT的伺服运动控制系统的架构和工作原理。此外,还对系统的性能进行了测试与分析,通过实验结果验证了基于EtherCAT的伺服运动控制系统的可行性和优势。关键词:基于