
一种基于钢丝传动变速比关节的下肢助力外骨骼机器人.pdf

森林****来了


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于钢丝传动变速比关节的下肢助力外骨骼机器人.pdf
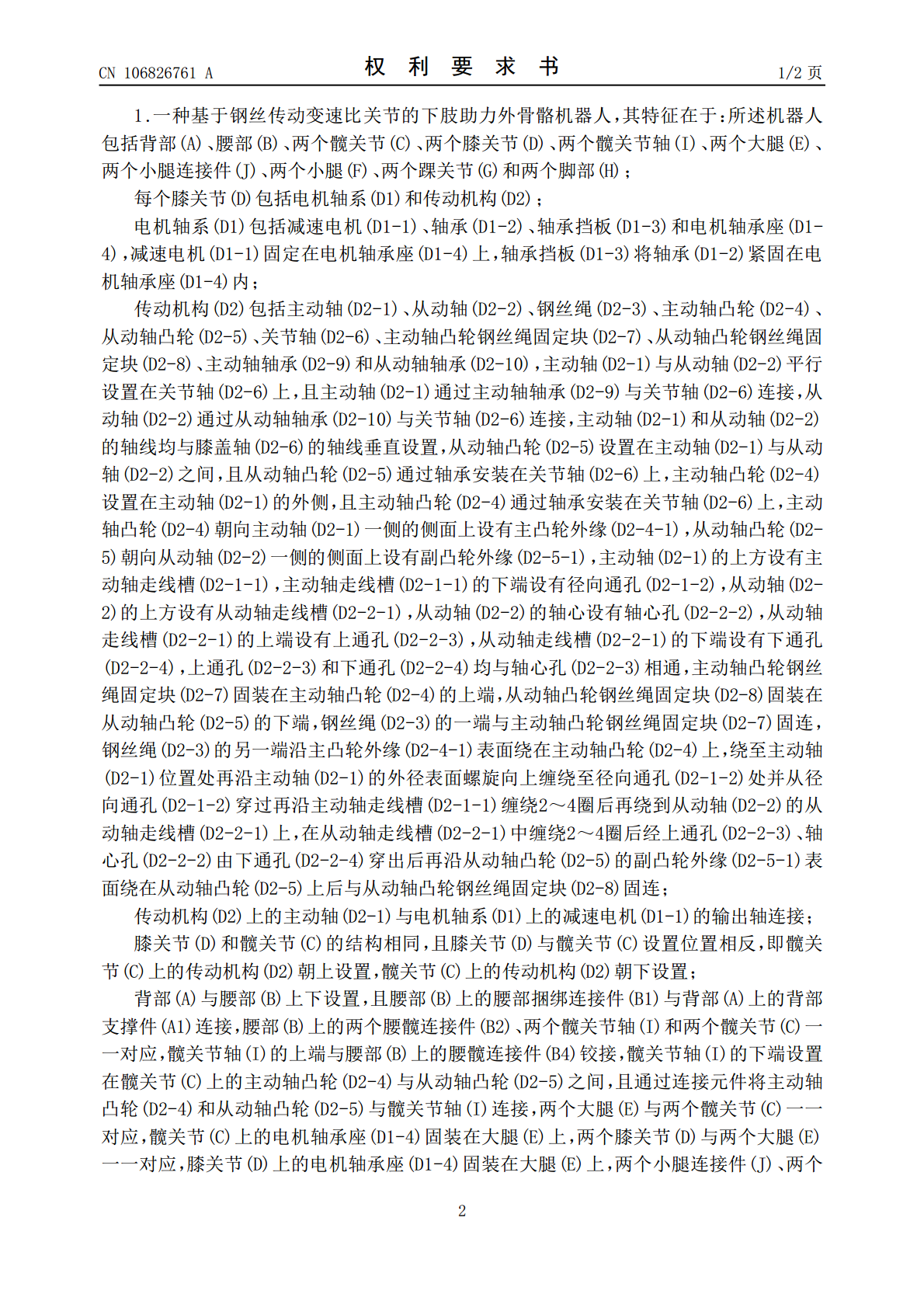
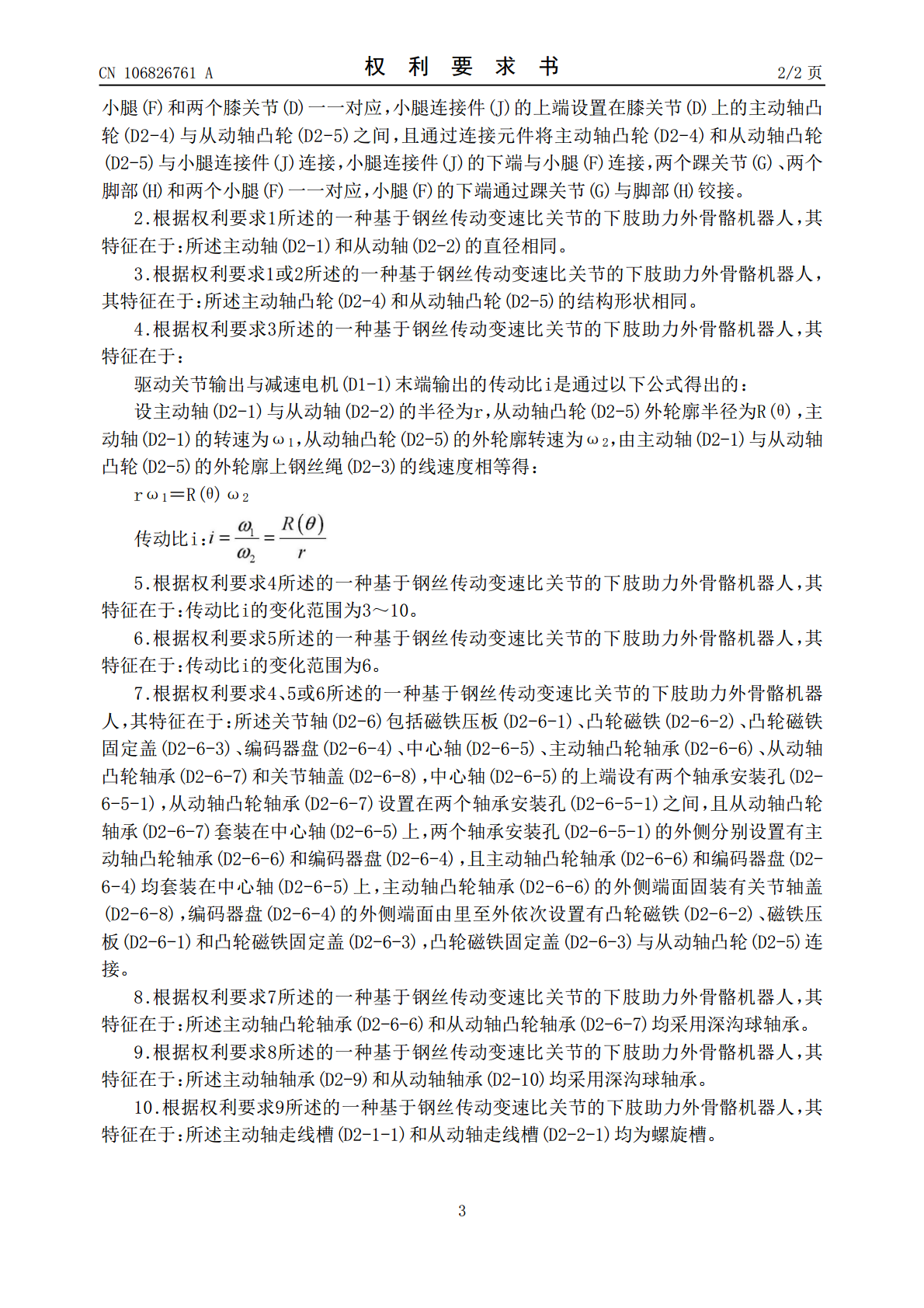
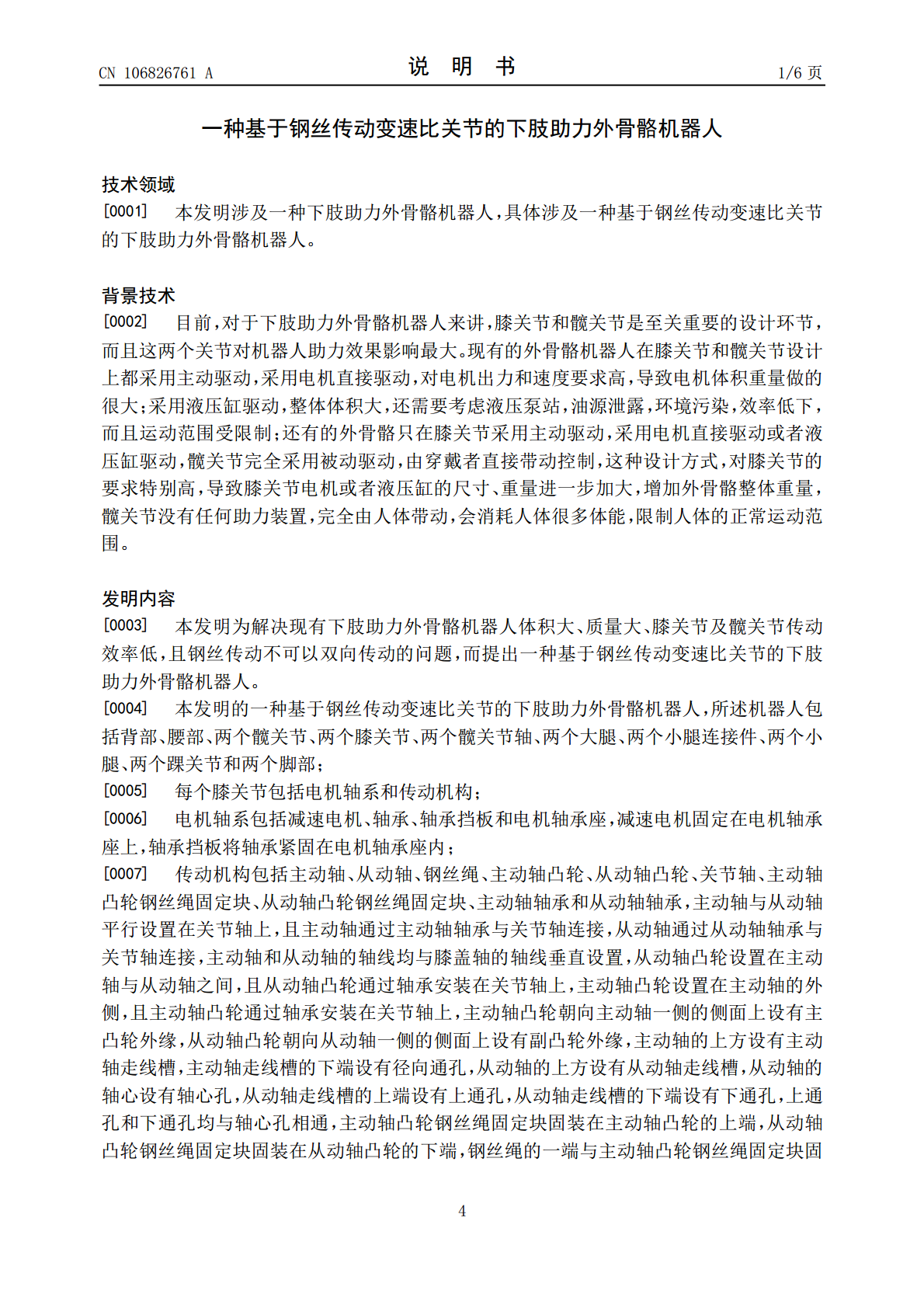
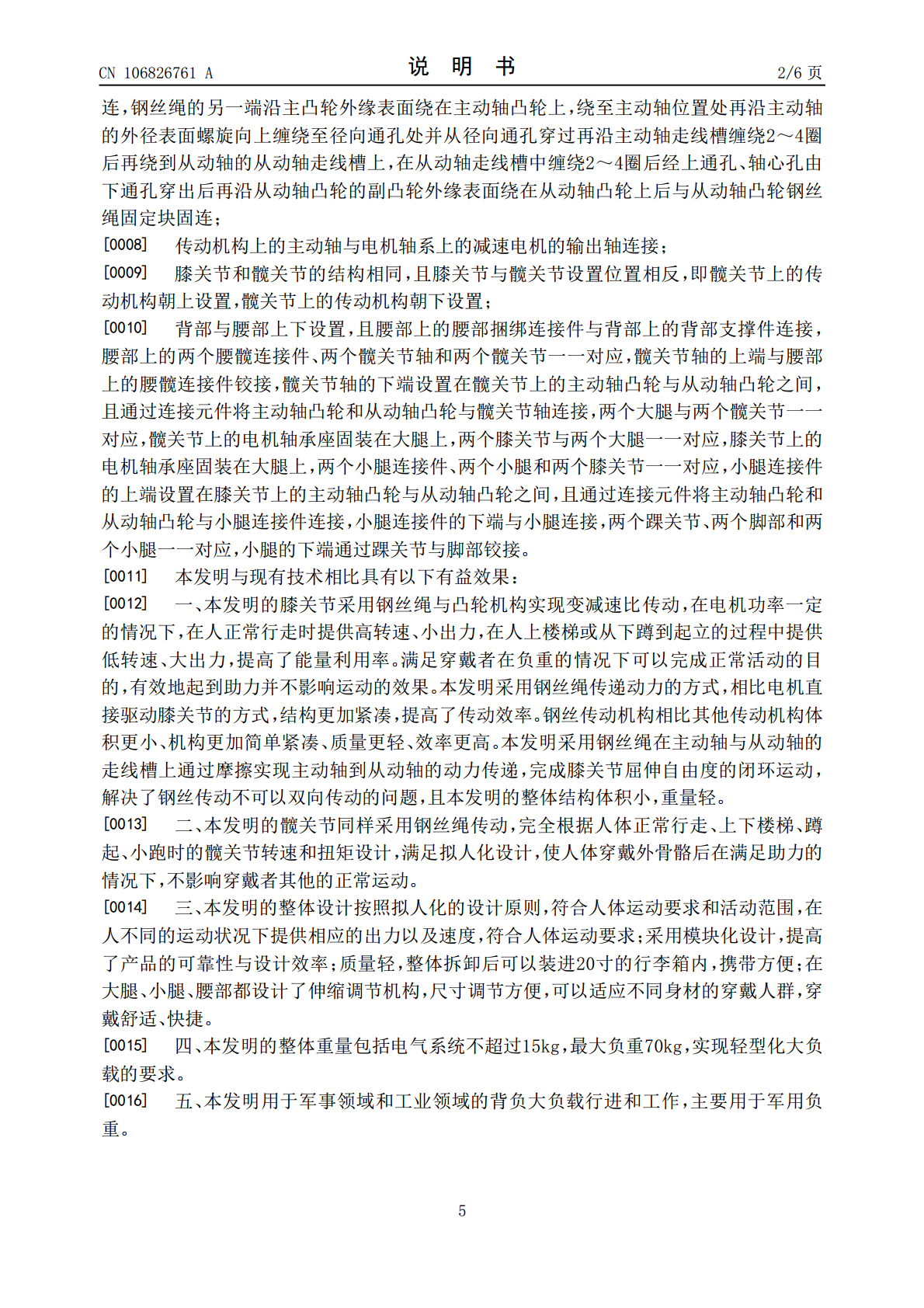
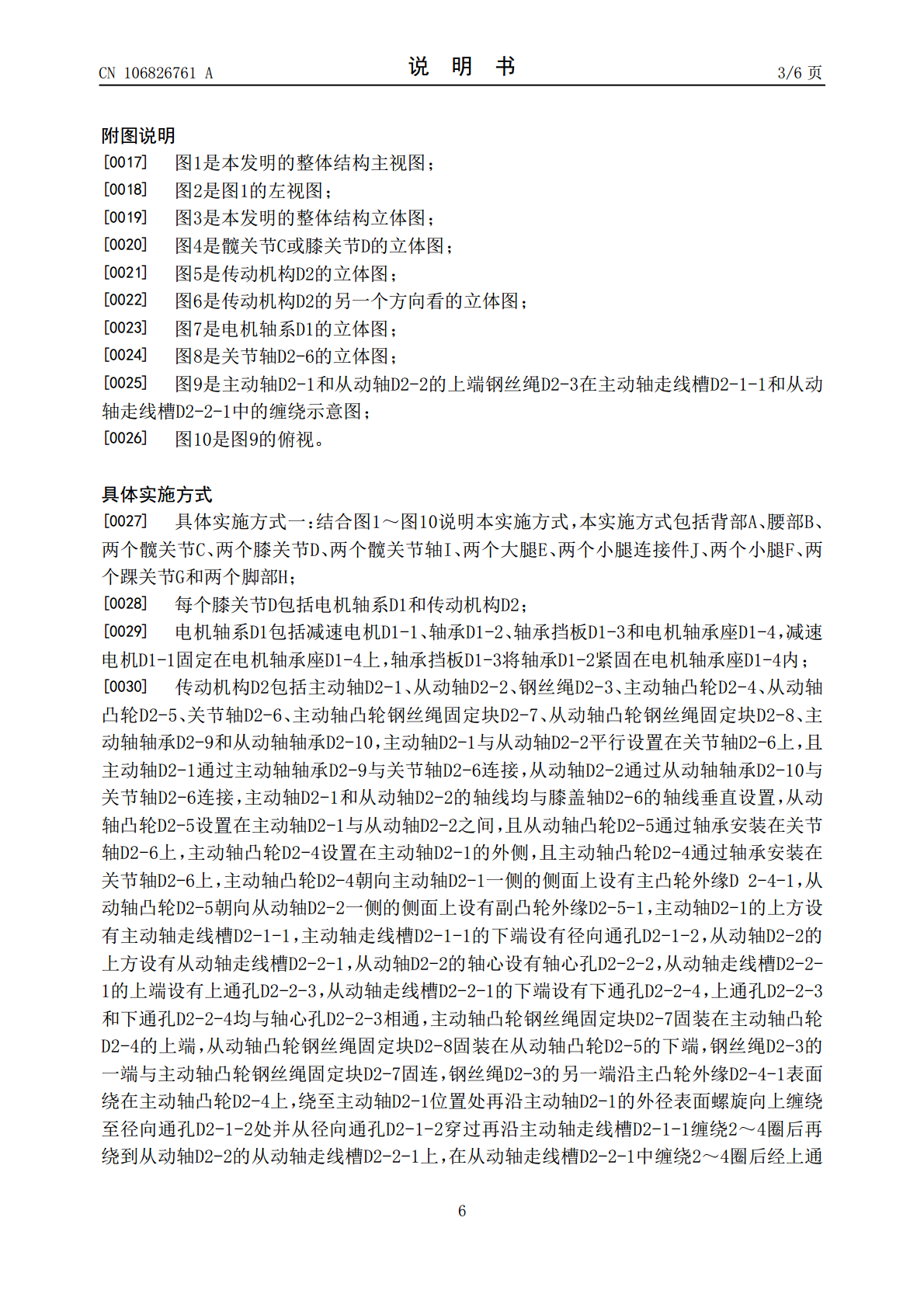
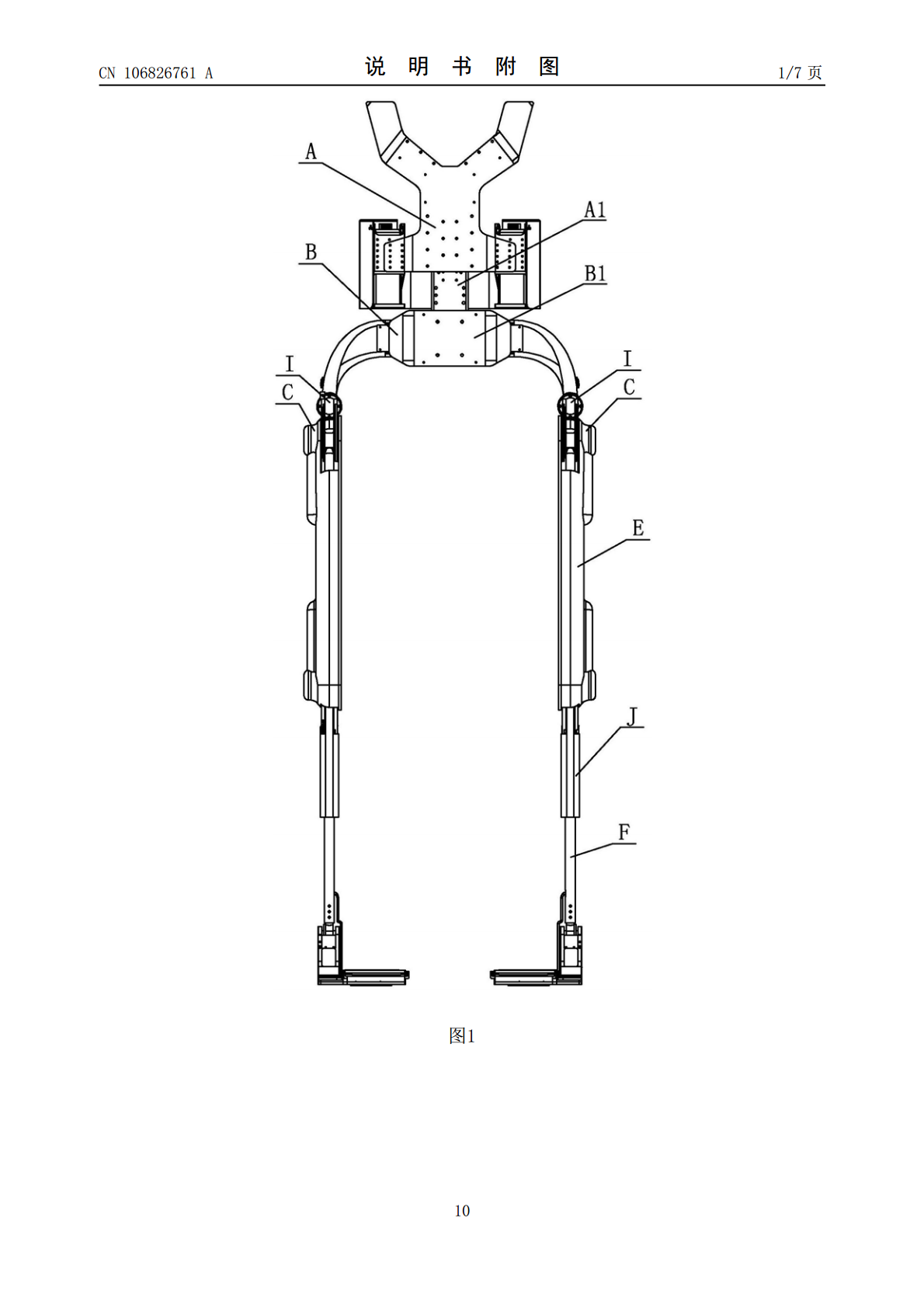
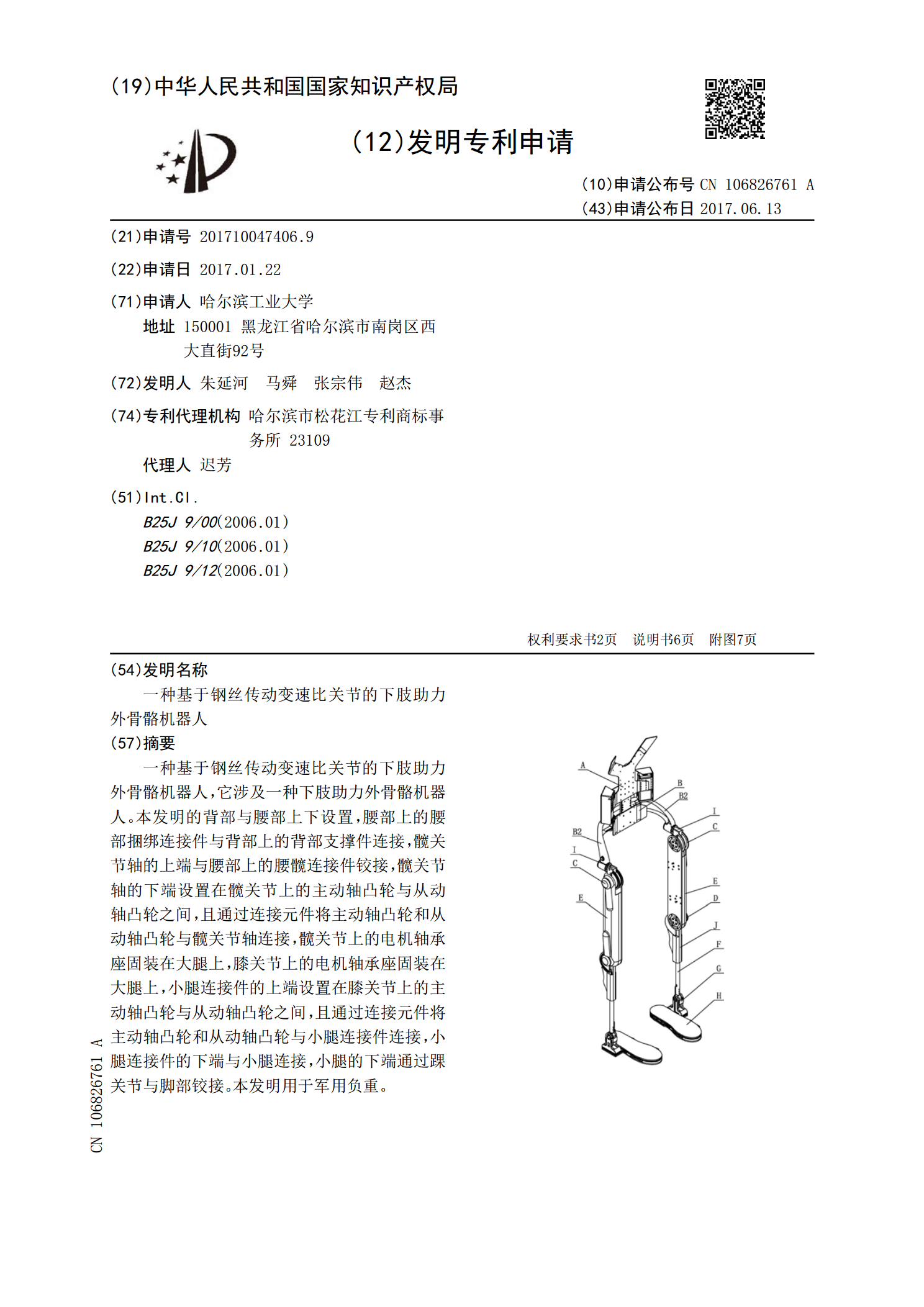
一种基于钢丝传动变速比关节的下肢助力外骨骼机器人,它涉及一种下肢助力外骨骼机器人。本发明的背部与腰部上下设置,腰部上的腰部捆绑连接件与背部上的背部支撑件连接,髋关节轴的上端与腰部上的腰髋连接件铰接,髋关节轴的下端设置在髋关节上的主动轴凸轮与从动轴凸轮之间,且通过连接元件将主动轴凸轮和从动轴凸轮与髋关节轴连接,髋关节上的电机轴承座固装在大腿上,膝关节上的电机轴承座固装在大腿上,小腿连接件的上端设置在膝关节上的主动轴凸轮与从动轴凸轮之间,且通过连接元件将主动轴凸轮和从动轴凸轮与小腿连接件连接,小腿连接件的下端

用于机器人的钢丝传动变速比转动关节.pdf
用于机器人的钢丝传动变速比转动关节,它涉及一种下肢助力外骨骼机器人。本发明包括电机轴系、传动机构、大腿连接件和小腿连接件;电机轴系包括减速电机、轴承、轴承挡板和电机轴承座,减速电机固定在电机轴承座上,轴承挡板将轴承紧固在电机轴承座内;传动机构包括主动轴、从动轴、钢丝绳、凸轮、关节轴、关节轴轴承、钢丝绳固定块、预紧机构、主动轴轴承和从动轴轴承,传动机构上的主动轴与电机轴系上的减速电机的输出轴连接,传动机构上的关节轴的两端通过轴承与大腿连接件连接,小腿连接件的上端与关节轴固接。本发明用于下肢助力外骨骼机器人上
一种助力外骨骼机器人的头部关节及助力外骨骼机器人.pdf
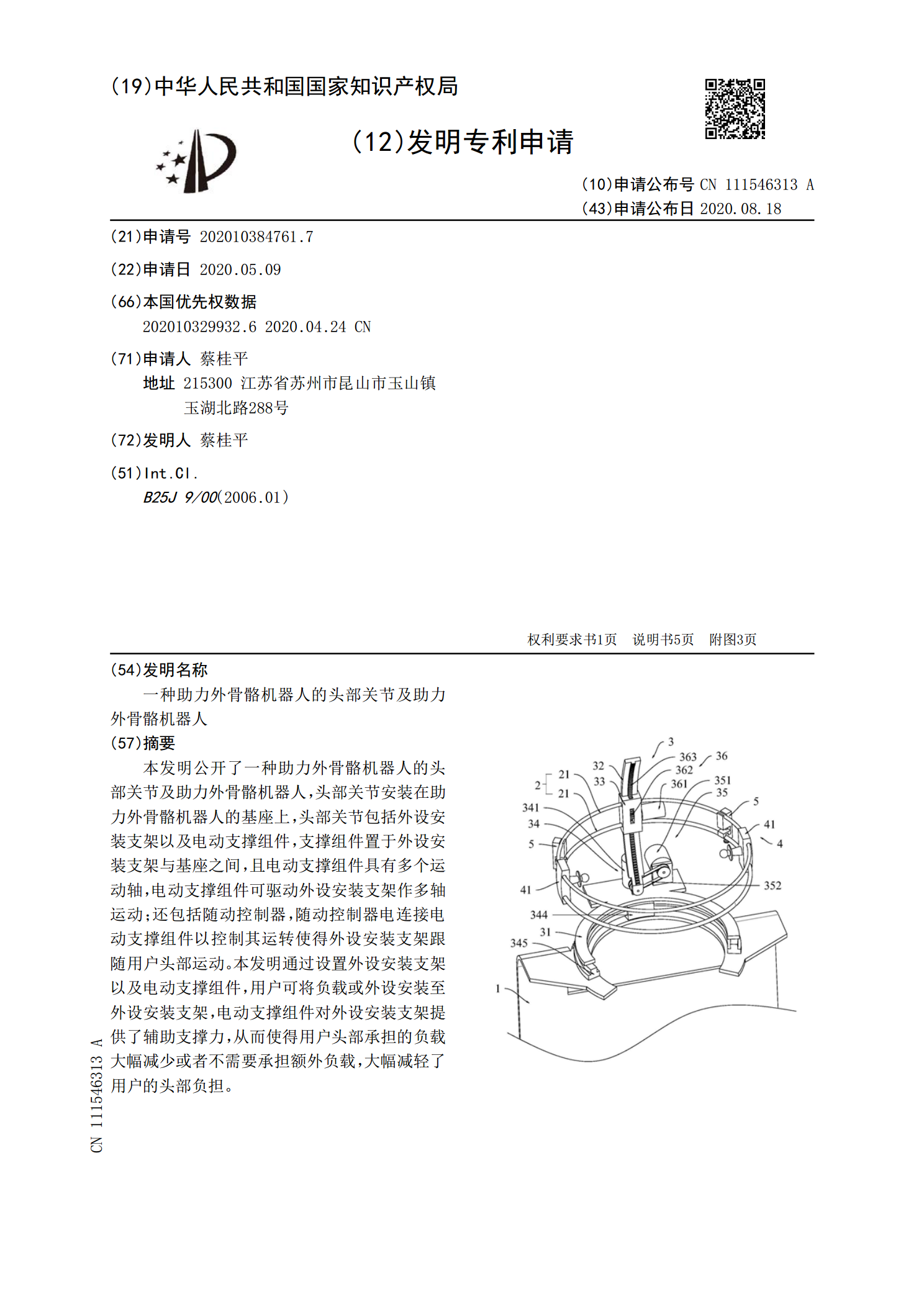
本发明公开了一种助力外骨骼机器人的头部关节及助力外骨骼机器人,头部关节安装在助力外骨骼机器人的基座上,头部关节包括外设安装支架以及电动支撑组件,支撑组件置于外设安装支架与基座之间,且电动支撑组件具有多个运动轴,电动支撑组件可驱动外设安装支架作多轴运动;还包括随动控制器,随动控制器电连接电动支撑组件以控制其运转使得外设安装支架跟随用户头部运动。本发明通过设置外设安装支架以及电动支撑组件,用户可将负载或外设安装至外设安装支架,电动支撑组件对外设安装支架提供了辅助支撑力,从而使得用户头部承担的负载大幅减少或者不

一种基于液压驱动的下肢搬运助力外骨骼机器人.pdf
本实用新型公开了一种基于液压驱动的下肢搬运助力外骨骼机器人,包括背板、肩关节连接机构、髋关节助力机构、膝关节连接机构和足部机构;背板包括肩部连接板、腰部连接板和纵向连接板;肩关节连接机构包括肩臂连接件、肩关节回转轴和肩背连接件;髋关节助力机构包括髋高调节板、固定片、支撑板、髋宽调节板、髋背回转件、双作用液压缸、压力传感器、腿外套、大腿内衬和大腿板;膝关节连接机构包括大腿连接板、前摇杆、后摇杆、小腿连接板和小腿板。本实用新型能助力搬运活动,而且不影响自由运动,提高人的负载能力,增加搬运效率;另外,只需要一个

一种用于下肢助力外骨骼机器人上的被动平衡髋关节.pdf
一种用于下肢助力外骨骼机器人上的被动平衡髋关节,以解决现有下肢助力外骨骼机器人上的髋关节采用被动驱动,没有任何动力源,完全由穿戴者带动,导致人体体能的消耗增加的问题。本发明的上滑轮轴与下滑轮轴上下平行设置在两个连接板之间,上滑轮轴和下滑轮轴分别固装在相应的滑轮轴孔中,上滑轮通过轴承安装在上滑轮轴上,下滑轮通过轴承安装在下滑轮轴上,钢丝的下端先绕过下滑轮再绕过上滑轮后与钢丝固定件连接,钢丝的上端绕过导向滑轮后与弹簧下压板连接,一组平衡弹簧的下端与弹簧下压板连接,一组平衡弹簧的上端与弹簧上压板连接,导向滑轮固