
一种机器人行走机构多刚体运动仿真设计方法.pdf

努力****向丝


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人行走机构多刚体运动仿真设计方法.pdf
本发明公开了一种机器人行走机构多刚体运动仿真设计方法,包括以下步骤:第一步:ADAMS/VIEW下的方针策略和步骤进行了研究和分析;第二步:在导入机器人行走机构虚拟样机模型后对机构的运动时间进行计算;第三步:完成在壕沟、高台障碍下的行走机构运动仿真的分析,得到在整个运动过程中机构质心以及摆臂和驱动轮的所承受的力矩数据;第四步:对数据进行的试验研究分析,得出摆臂和驱动力矩在运动过程中与运动状态及机构间部件的相互影响关系,得出所设计的行走机构能够完成预期的设计功能。本发明的机器人行走机构多刚体运动仿真设计方法
一种仿真机器人行走机构.pdf
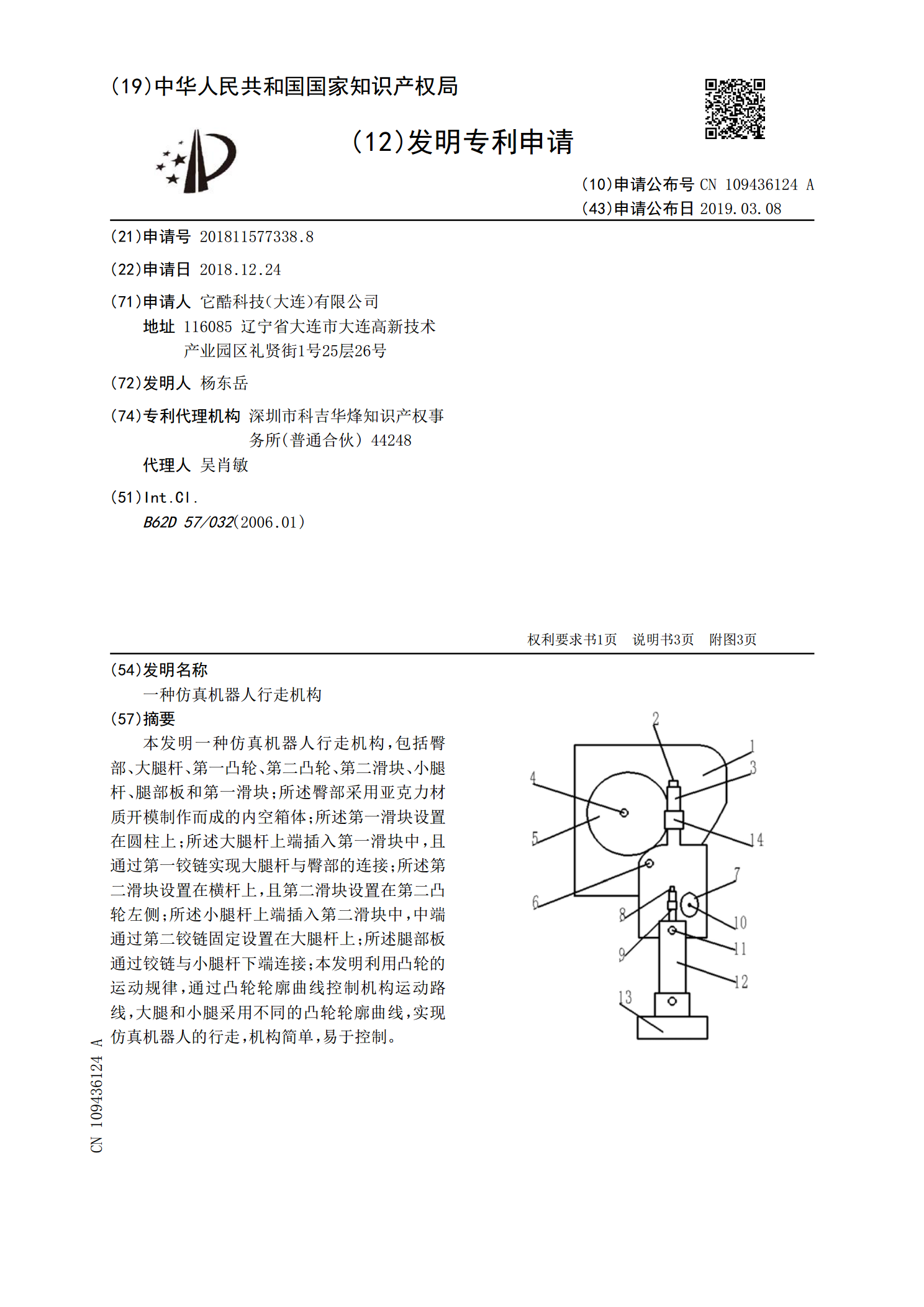
本发明一种仿真机器人行走机构,包括臀部、大腿杆、第一凸轮、第二凸轮、第二滑块、小腿杆、腿部板和第一滑块;所述臀部采用亚克力材质开模制作而成的内空箱体;所述第一滑块设置在圆柱上;所述大腿杆上端插入第一滑块中,且通过第一铰链实现大腿杆与臀部的连接;所述第二滑块设置在横杆上,且第二滑块设置在第二凸轮左侧;所述小腿杆上端插入第二滑块中,中端通过第二铰链固定设置在大腿杆上;所述腿部板通过铰链与小腿杆下端连接;本发明利用凸轮的运动规律,通过凸轮轮廓曲线控制机构运动路线,大腿和小腿采用不同的凸轮轮廓曲线,实现仿真机器人
一种机器人运动仿真方法及仿真系统.pdf
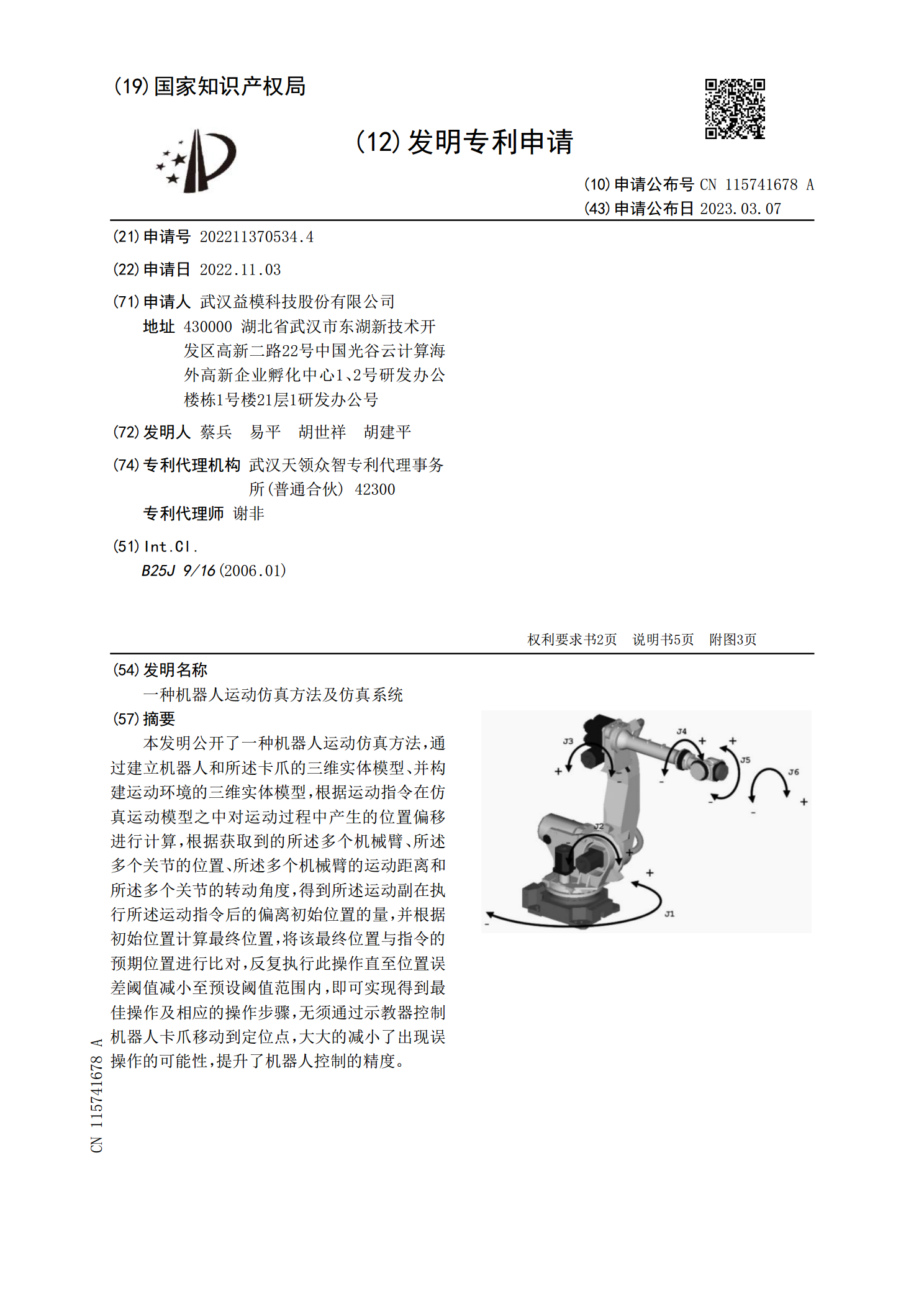
本发明公开了一种机器人运动仿真方法,通过建立机器人和所述卡爪的三维实体模型、并构建运动环境的三维实体模型,根据运动指令在仿真运动模型之中对运动过程中产生的位置偏移进行计算,根据获取到的所述多个机械臂、所述多个关节的位置、所述多个机械臂的运动距离和所述多个关节的转动角度,得到所述运动副在执行所述运动指令后的偏离初始位置的量,并根据初始位置计算最终位置,将该最终位置与指令的预期位置进行比对,反复执行此操作直至位置误差阈值减小至预设阈值范围内,即可实现得到最佳操作及相应的操作步骤,无须通过示教器控制机器人卡爪移

一种多足机器人行走机构.pdf
本发明属于移动机器人领域,尤其涉及一种多足机器人行走机构。本发明提供了一种多足机器人行走机构,包括:机器人行走足;机器人行走足姿态控制装置;机器人行走履带;其中,所述机器人行走足包含三个关节,固定在机器人行走履带上,可通过机器人行走足姿态控制装置控制,其作用在于提供对地面及其他支撑物的抓紧力和支撑力;所述机器人行走足姿态控制装置主要用于控制行走足适时张开和抓紧;所述机器人行走履带并不直接接触地面,而是通过固定在其上的行走足接触地面,实现机器人的前进后退。本发明结合了多足行走和履带式行走的特点,既提高越障能

一种通用的刚体部件传动仿真方法.pdf
本发明公开了一种通用的刚体部件传动仿真方法,包括以下步骤:1)从仿真目标中,建立所有的运动关联树状数据;2)对应用户不同的指令,找到对应的树结构,进行运算逻辑;3)每次指令引起刚体运动,逻辑运算会根据刚体本身的性质,同时记录树形结构中刚体之间连接杆的不同状态,得到每个刚体能做的运动范围量;4)在运动范围量内,采样运动产生的离散数据;5)动态计算刚体两端的实时位置信息;6)整体逻辑方法采用本发明的树形结构。本发明能逼真的实现类似GW4—126D型隔离开关中电控/手控操作引起的系统部件运动,能精确、可控的模拟