
一种机器人运动仿真方法及仿真系统.pdf

秀美****甜v

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人运动仿真方法及仿真系统.pdf
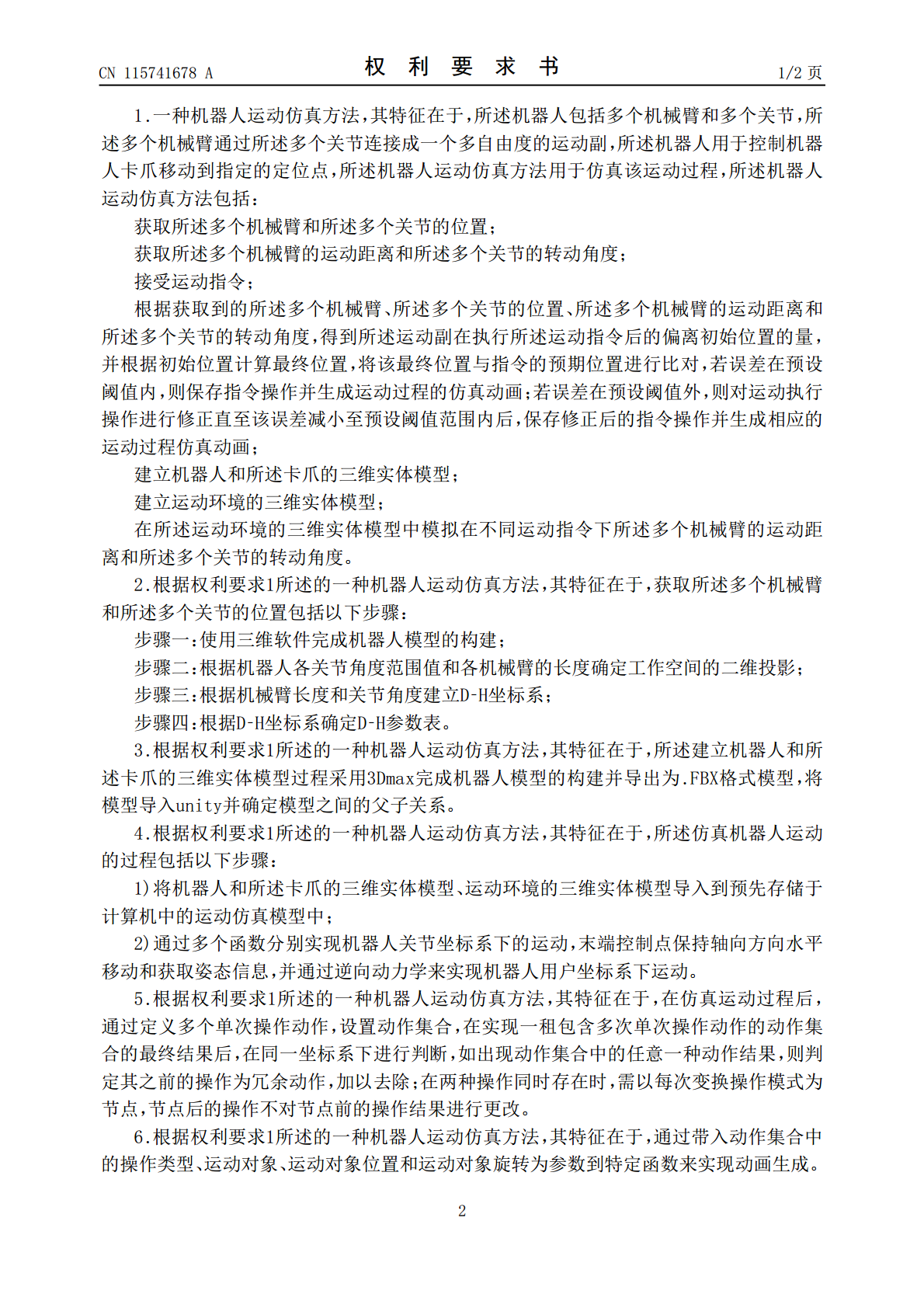
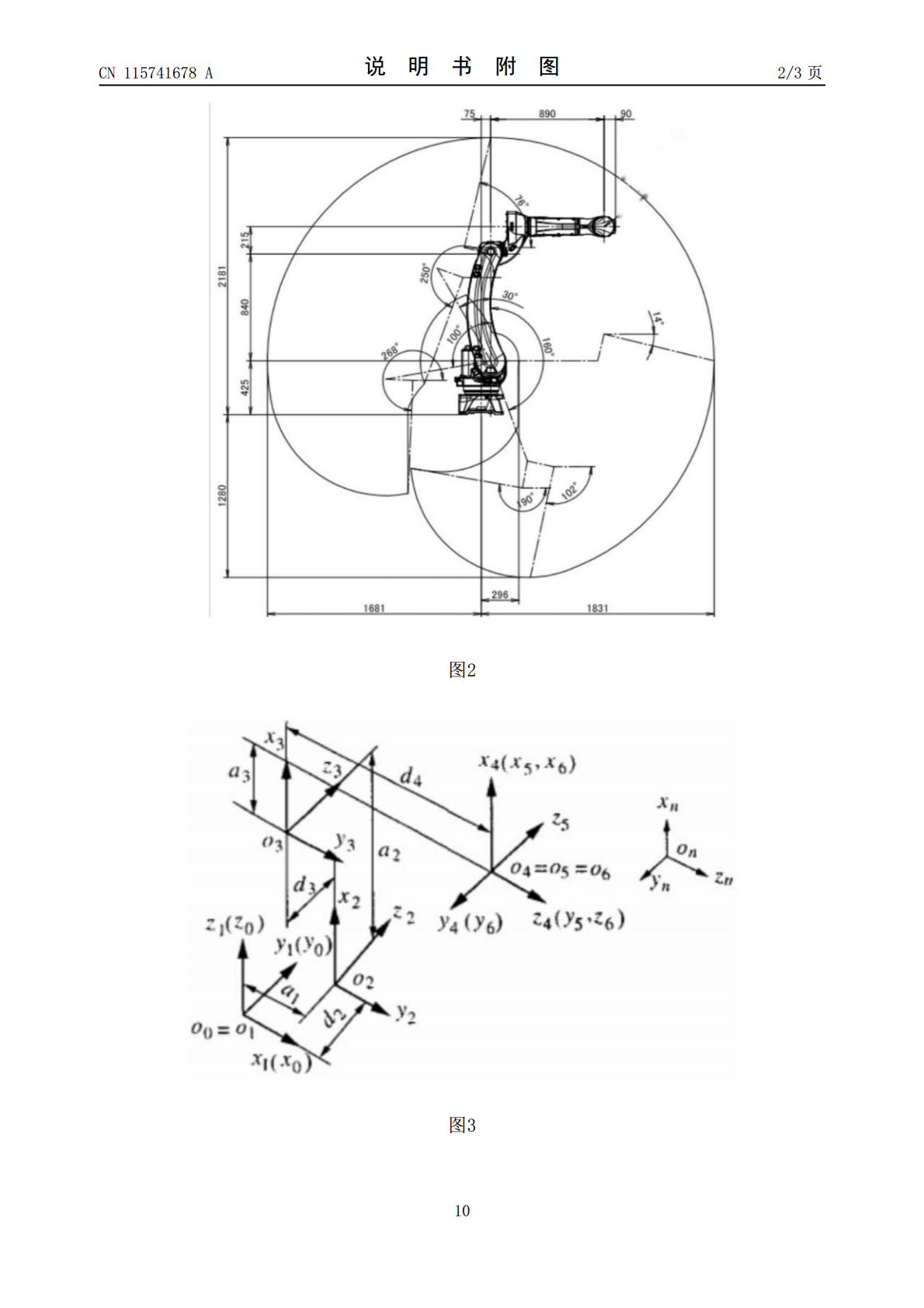
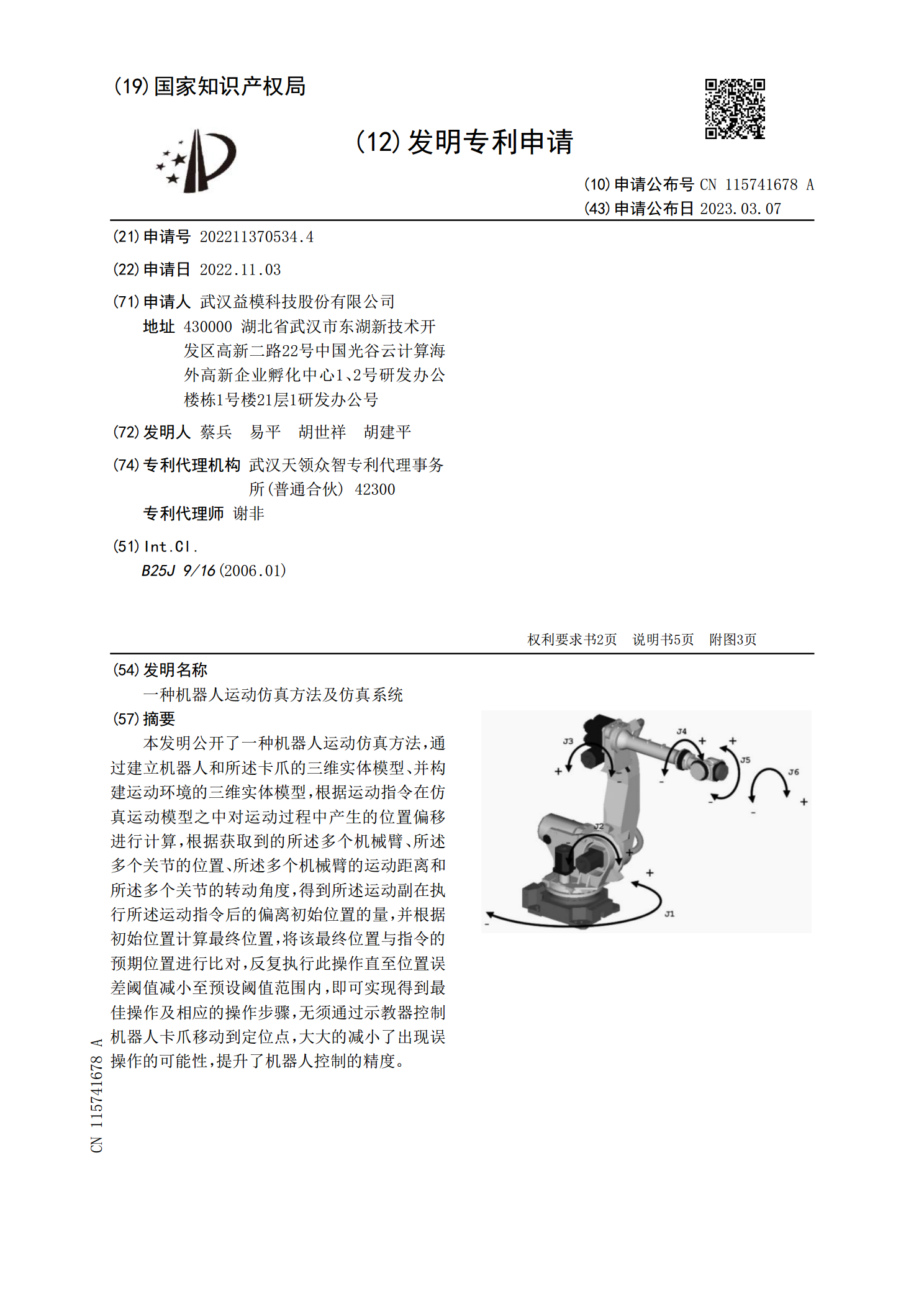
本发明公开了一种机器人运动仿真方法,通过建立机器人和所述卡爪的三维实体模型、并构建运动环境的三维实体模型,根据运动指令在仿真运动模型之中对运动过程中产生的位置偏移进行计算,根据获取到的所述多个机械臂、所述多个关节的位置、所述多个机械臂的运动距离和所述多个关节的转动角度,得到所述运动副在执行所述运动指令后的偏离初始位置的量,并根据初始位置计算最终位置,将该最终位置与指令的预期位置进行比对,反复执行此操作直至位置误差阈值减小至预设阈值范围内,即可实现得到最佳操作及相应的操作步骤,无须通过示教器控制机器人卡爪移
一种轮式机器人控制系统仿真系统及仿真方法.pdf
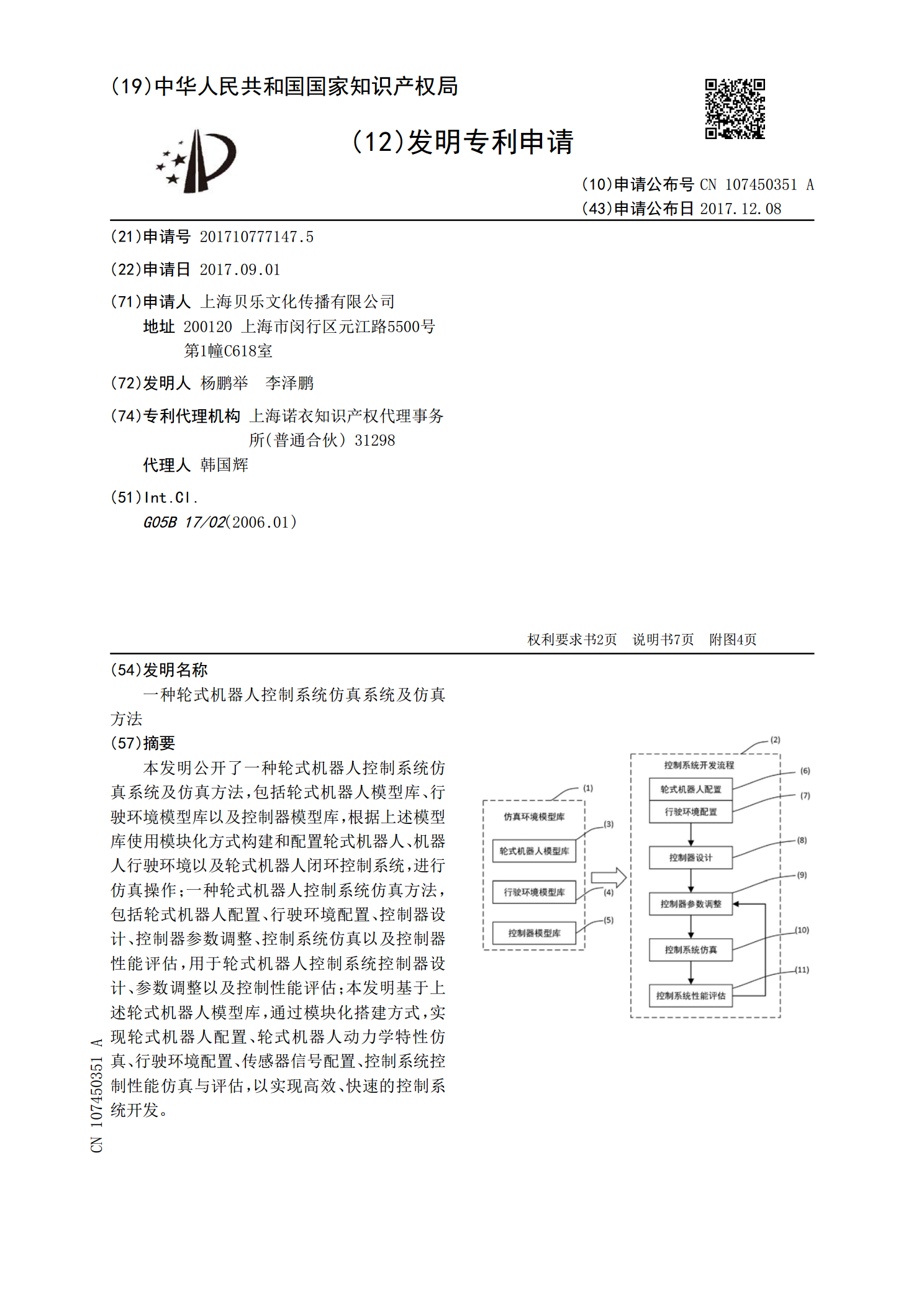
本发明公开了一种轮式机器人控制系统仿真系统及仿真方法,包括轮式机器人模型库、行驶环境模型库以及控制器模型库,根据上述模型库使用模块化方式构建和配置轮式机器人、机器人行驶环境以及轮式机器人闭环控制系统,进行仿真操作;一种轮式机器人控制系统仿真方法,包括轮式机器人配置、行驶环境配置、控制器设计、控制器参数调整、控制系统仿真以及控制器性能评估,用于轮式机器人控制系统控制器设计、参数调整以及控制性能评估;本发明基于上述轮式机器人模型库,通过模块化搭建方式,实现轮式机器人配置、轮式机器人动力学特性仿真、行驶环境配置

一种水下机器人仿真展示系统及仿真方法.pdf
本发明涉及一种水下机器人仿真展示系统及其仿真方法,本水下机器人仿真展示系统包括:运动模型仿真部分和实景仿真部分,其中所述运动模型仿真部分适于模拟水下机器人运动;以及所述实景仿真部分适于模拟水下环境。所述运动模型仿真部分包括:指令交互模块、碰撞检测模块和动作关联模块,所述实景仿真部分包括:特效渲染模块、三维视角模块和DEMO播放模块。本发明能够使水下机器人在水下环境中对其工作动作、环境进行仿真展示,便于观察者能够清楚的观察水下机器人的状态,分析其运动过程,能够获得机器人足够的水下作业数据,以完善真实水下机器
一种人群运动仿真方法及系统.pdf
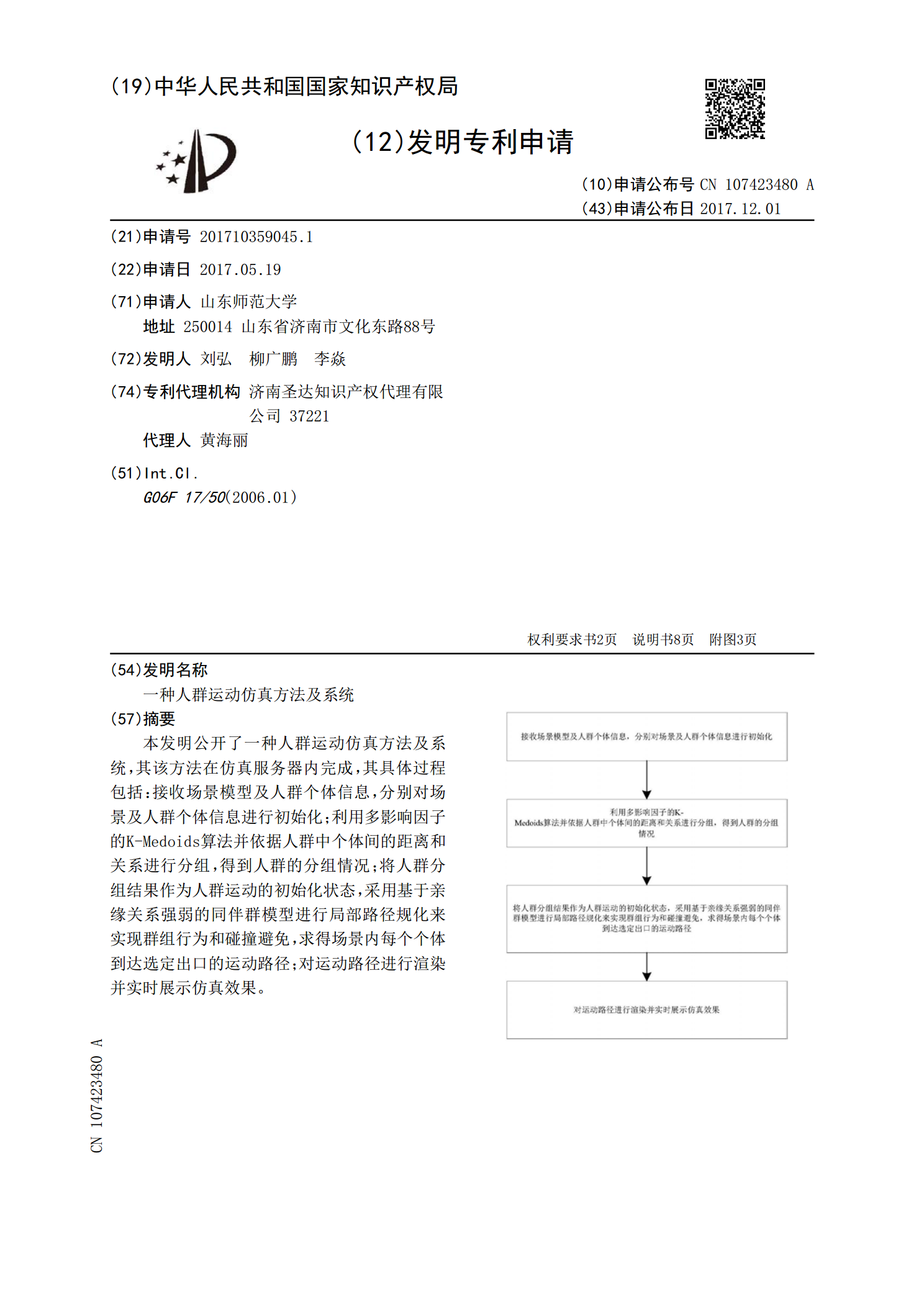
本发明公开了一种人群运动仿真方法及系统,其该方法在仿真服务器内完成,其具体过程包括:接收场景模型及人群个体信息,分别对场景及人群个体信息进行初始化;利用多影响因子的K‑Medoids算法并依据人群中个体间的距离和关系进行分组,得到人群的分组情况;将人群分组结果作为人群运动的初始化状态,采用基于亲缘关系强弱的同伴群模型进行局部路径规化来实现群组行为和碰撞避免,求得场景内每个个体到达选定出口的运动路径;对运动路径进行渲染并实时展示仿真效果。
一种半物理仿真系统及仿真方法.pdf
本发明属于仿真技术领域,公开了一种半物理仿真系统;由控制输入插件向服务端输入联合仿真配制信息;模型客户端通过客户端通信插件读取联合仿真配制信息,并将其发送至建模工具,运行建模工具生成虚拟模型,模型客户端采集建模工具内的虚拟模型数据,并将其通过客户端插件接入服务端;V2R客户端通过设备通信插件读取服务端的虚拟模型数据,并通过测控工具解析其指令,以控制物理设备运行;V2R客户端采集物理设备运行数据,并将其通过设备通信插件发送至服务端;通过采用多源异构分布式集成仿真架构和白盒模型的方式集成仿真,并能够直接在建模