
一种仿真机器人行走机构.pdf

阳炎****找我


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿真机器人行走机构.pdf
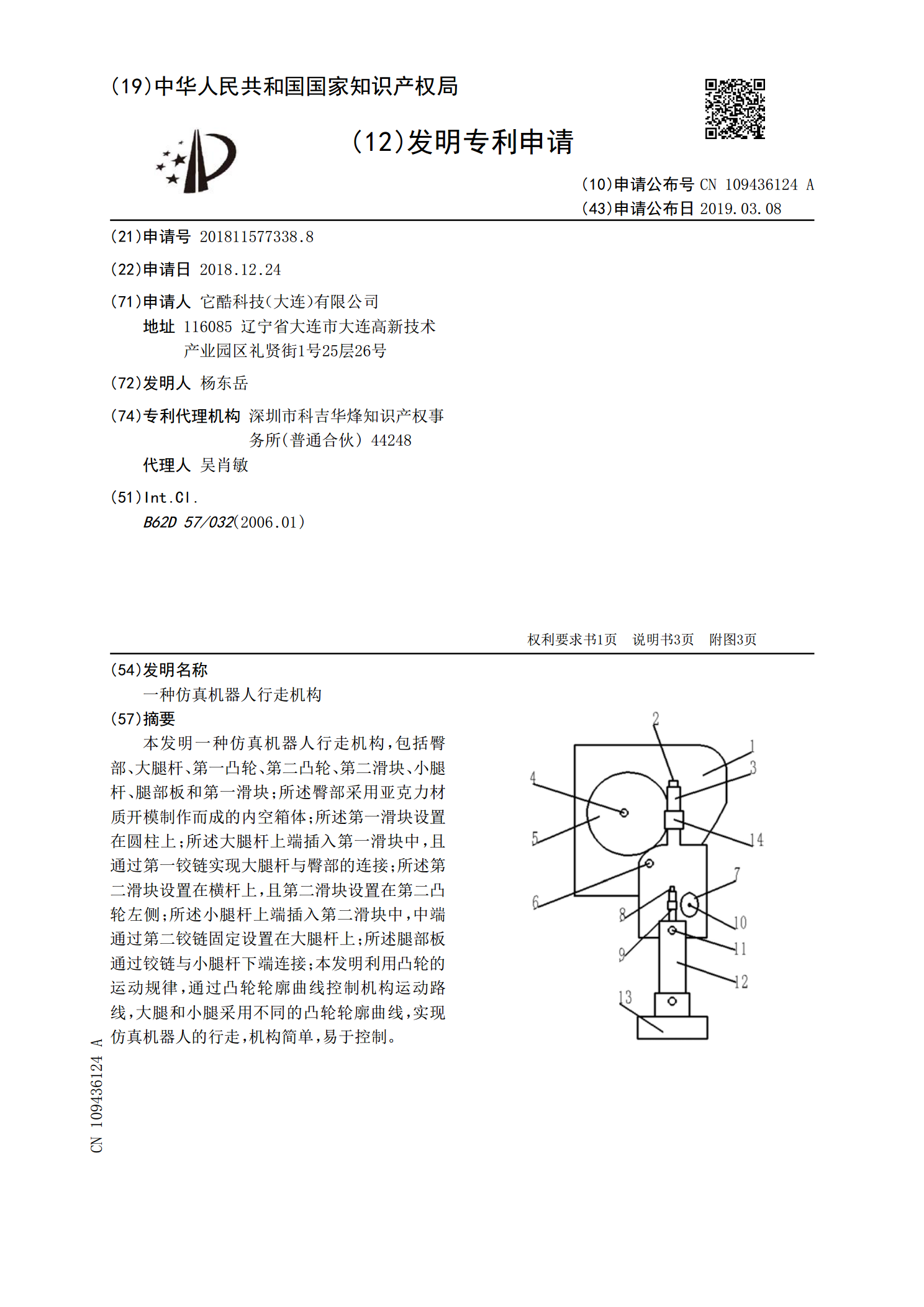
本发明一种仿真机器人行走机构,包括臀部、大腿杆、第一凸轮、第二凸轮、第二滑块、小腿杆、腿部板和第一滑块;所述臀部采用亚克力材质开模制作而成的内空箱体;所述第一滑块设置在圆柱上;所述大腿杆上端插入第一滑块中,且通过第一铰链实现大腿杆与臀部的连接;所述第二滑块设置在横杆上,且第二滑块设置在第二凸轮左侧;所述小腿杆上端插入第二滑块中,中端通过第二铰链固定设置在大腿杆上;所述腿部板通过铰链与小腿杆下端连接;本发明利用凸轮的运动规律,通过凸轮轮廓曲线控制机构运动路线,大腿和小腿采用不同的凸轮轮廓曲线,实现仿真机器人

一种机器人行走机构多刚体运动仿真设计方法.pdf
本发明公开了一种机器人行走机构多刚体运动仿真设计方法,包括以下步骤:第一步:ADAMS/VIEW下的方针策略和步骤进行了研究和分析;第二步:在导入机器人行走机构虚拟样机模型后对机构的运动时间进行计算;第三步:完成在壕沟、高台障碍下的行走机构运动仿真的分析,得到在整个运动过程中机构质心以及摆臂和驱动轮的所承受的力矩数据;第四步:对数据进行的试验研究分析,得出摆臂和驱动力矩在运动过程中与运动状态及机构间部件的相互影响关系,得出所设计的行走机构能够完成预期的设计功能。本发明的机器人行走机构多刚体运动仿真设计方法

电缆隧道巡检机器人行走机构的仿真研究.docx
电缆隧道巡检机器人行走机构的仿真研究电缆隧道巡检机器人行走机构的仿真研究摘要:电缆隧道是现代城市电力系统不可或缺的一部分,为了提高电缆隧道的巡检效率和减少人工巡检的风险,设计一种行走机构的巡检机器人具有重要的实用价值。本文以电缆隧道巡检机器人的行走机构仿真研究为课题,通过建立机器人行走模型和分析仿真结果,对机器人行走机构进行了优化和改进,提高了机器人的行走稳定性和适应能力。关键词:电缆隧道;巡检机器人;行走机构;仿真研究1.引言电缆隧道是电力系统中负责电力输送和传输的重要通道,其长度较长、形状复杂、工作环
一种机器人行走机构.pdf
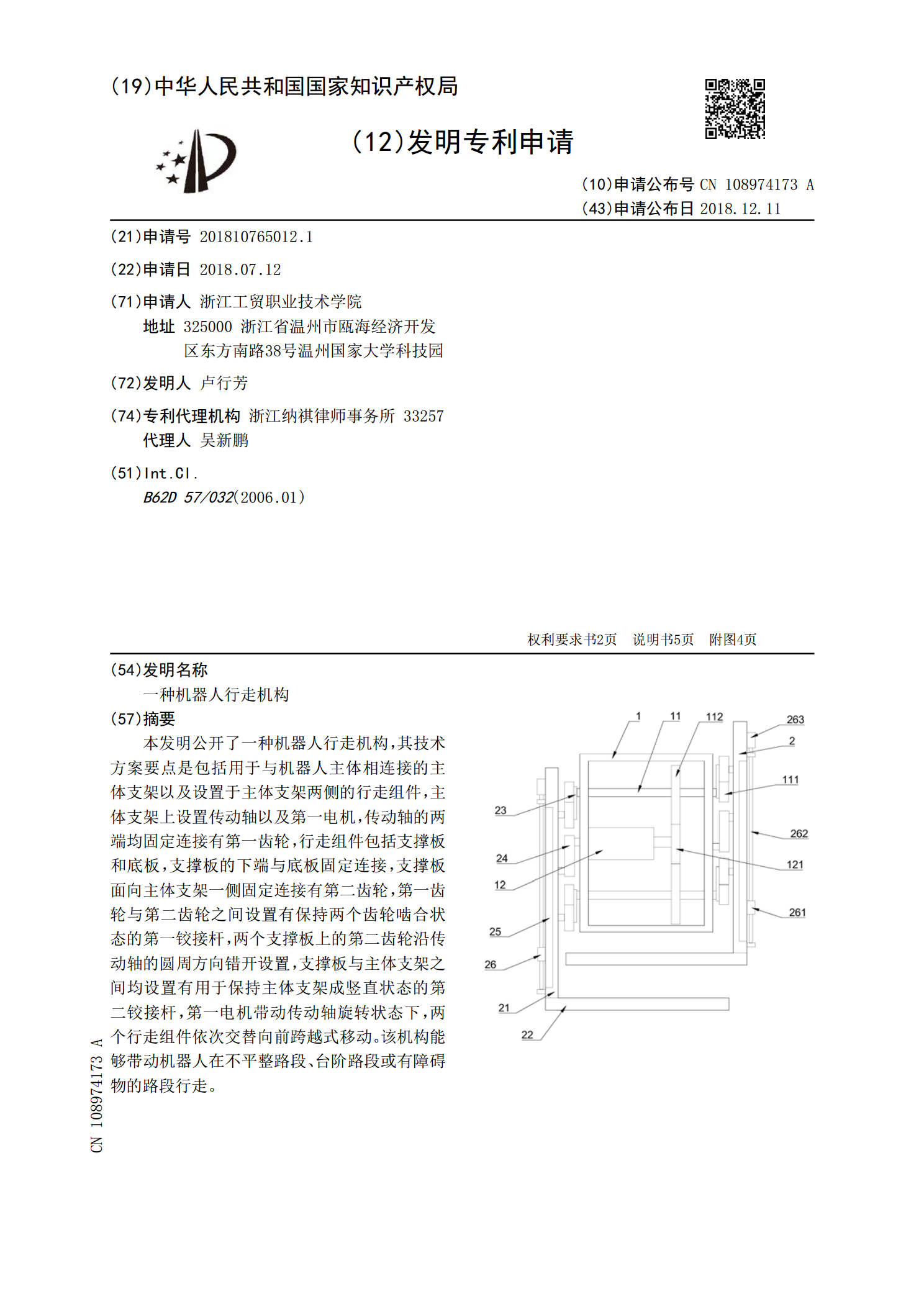
本发明公开了一种机器人行走机构,其技术方案要点是包括用于与机器人主体相连接的主体支架以及设置于主体支架两侧的行走组件,主体支架上设置传动轴以及第一电机,传动轴的两端均固定连接有第一齿轮,行走组件包括支撑板和底板,支撑板的下端与底板固定连接,支撑板面向主体支架一侧固定连接有第二齿轮,第一齿轮与第二齿轮之间设置有保持两个齿轮啮合状态的第一铰接杆,两个支撑板上的第二齿轮沿传动轴的圆周方向错开设置,支撑板与主体支架之间均设置有用于保持主体支架成竖直状态的第二铰接杆,第一电机带动传动轴旋转状态下,两个行走组件依次交

一种机器人行走机构.pdf
本发明公开了一种机器人行走机构,包括底盘,所述底盘的前部的左右两侧和底盘后部的左右两侧各设有一个行走腿,所述底盘内固定有两个双头步进电机,所述双头步进电机的四个主轴分别与四个行走腿固定相连,所述每根行走腿上均设有一个旋转步进电机,所述旋转步进电机的主轴分别与一个带轮连接板固定连接,所述每块带轮连接板上均有一个滚动步进电机,所述滚动步进电机的外部套接有一个主动带轮,所述主动带轮上设有转轴,所述转轴与滚动步进电机的主轴固定连接,所述旋转步进电机的外围套接有一个从动带轮,所述从动带轮和主动带轮之间设有同步带。本