
一种车辆轮胎垂直载荷监测装置及方法.pdf

永梅****33


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆轮胎垂直载荷监测装置及方法.pdf
本发明属于车辆驱动控制领域。为了解决目前多轮独立驱动车辆行驶过程中的轮胎垂直载荷无法获取的问题,本发明提供了一种车辆轮胎垂直载荷监测装置及方法,包括建立单元、检测单元及计算单元;建立单元与检测单元连接,用于建立三维坐标系;检测单元与计算单元连接,用于检测车辆相对于三维坐标系X、Y、Z轴的角速度;计算单元用于根据计算式:

一种利用应变计算轮胎垂直载荷实时监测方法及载荷实时监测的轮胎.pdf
本发明提供一种利用应变计算轮胎垂直载荷实时监测方法及载荷实时监测的轮胎,步骤11)将设有应变片的单轴加速度传感器安装在轮胎侧壁;该传感器安装时,所述单轴加速度方向为周向加速度;当轮胎起步滚动时,所述单轴加速度传感器进行采样;步骤12)通过对轮胎转速计算轮胎的传感器进入轮胎接地印痕区域时,传感器的单轴加速度在前半采样周期中存在负值,且采样周期中获得的绝对值大于设定阈值时,传感器开始采样获得轮胎侧面指定区域的应变电阻值;步骤13)每次采样获得应变电阻值均与前值进行比较,则将采样区间内获得的最大的应变电阻值作为

基于车辆载荷监测车辆轮胎气压的装置.pdf
一种基于车辆载荷监测车辆轮胎气压的装置,该装置具有监测模块和与该监测模块操作地连接的计算模块。监测模块配置成感应轮胎气压。此外,监测模块配置成把感应到的气压与轮胎的低压限值进行比较以识别低压条件。计算模块包括接口模块以及处理模块,该接口模块配置成一旦低压条件得以识别即向用户发出告警并且接受新的载荷值。该处理模块配置成基于新载荷值生成新的轮胎气压值,并将该新的轮胎气压值推荐给用户,当确定用户接受新的轮胎气压值时,将轮胎气压变为新的轮胎气压值。
一种车辆行驶期间检测轮胎动态垂直载荷的方法及系统.pdf
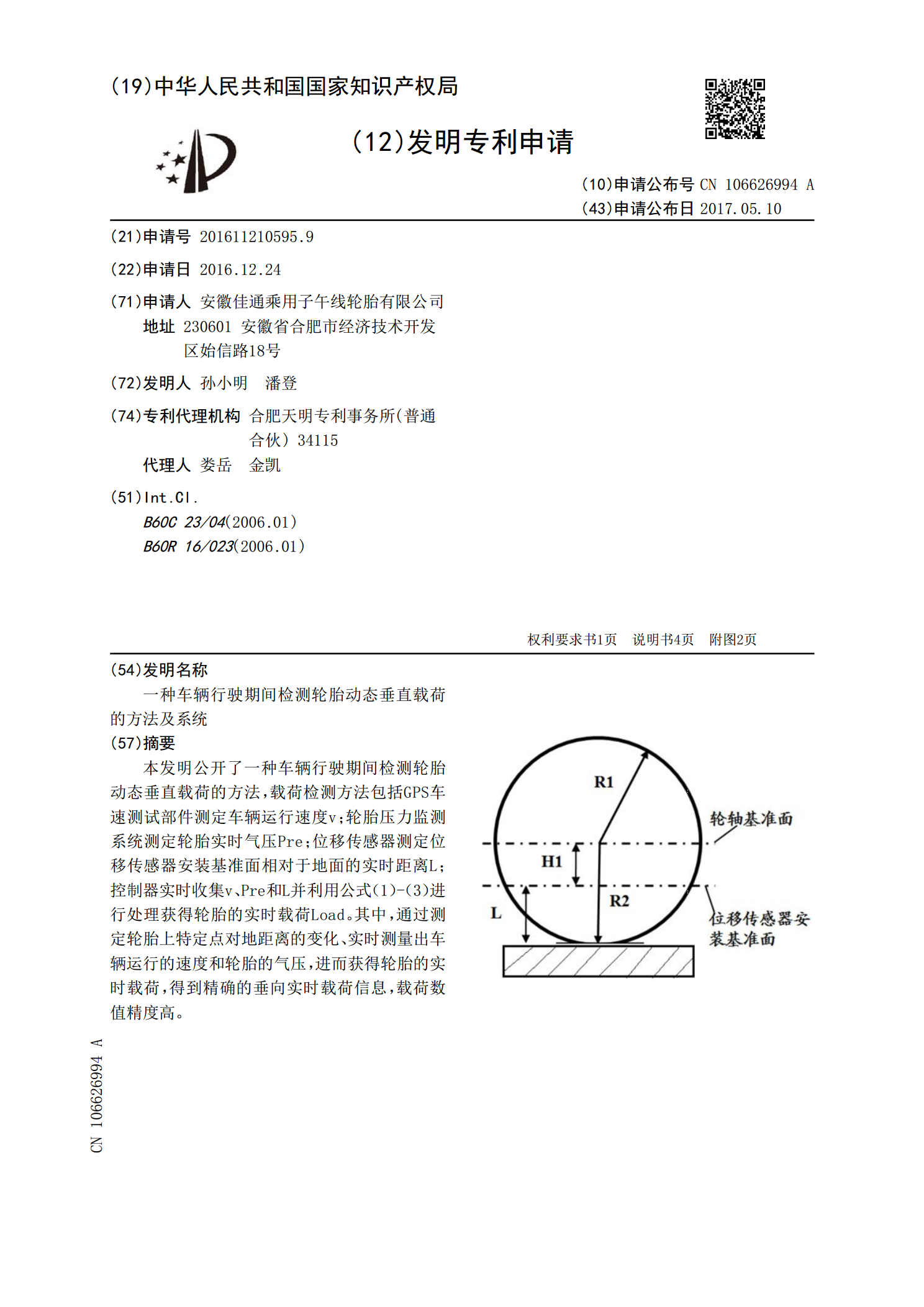
本发明公开了一种车辆行驶期间检测轮胎动态垂直载荷的方法,载荷检测方法包括GPS车速测试部件测定车辆运行速度v;轮胎压力监测系统测定轮胎实时气压Pre;位移传感器测定位移传感器安装基准面相对于地面的实时距离L;控制器实时收集v、Pre和L并利用公式(1)‑(3)进行处理获得轮胎的实时载荷Load。其中,通过测定轮胎上特定点对地距离的变化、实时测量出车辆运行的速度和轮胎的气压,进而获得轮胎的实时载荷,得到精确的垂向实时载荷信息,载荷数值精度高。

轮胎载荷推断方法及轮胎载荷推断装置.pdf
为了提供能够利用较少的传感器高精度地推断对轮胎作用的载荷的方法及其装置,由加速度传感器(11)、用于根据加速度传感器(11)的输出来检测轮胎径向加速度波形的加速度波形检测部件(13)、用于将所述加速度波形微分而求出微分加速度波形的微分加速度波形运算部件(14)、用于检测在微分加速度波形中出现的踏入端侧的峰值位置和蹬出端侧的峰值位置的峰值位置检测部件(15)、用于根据所述峰值位置来计算接地时间和旋转时间并且运算作为计算出的接地时间与旋转时间之比的旋转时间比的接地时间比运算部件(16)、以及用于根据运算出的接