
液控差速转向方法.pdf

猫巷****傲柏

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

液控差速转向方法.pdf
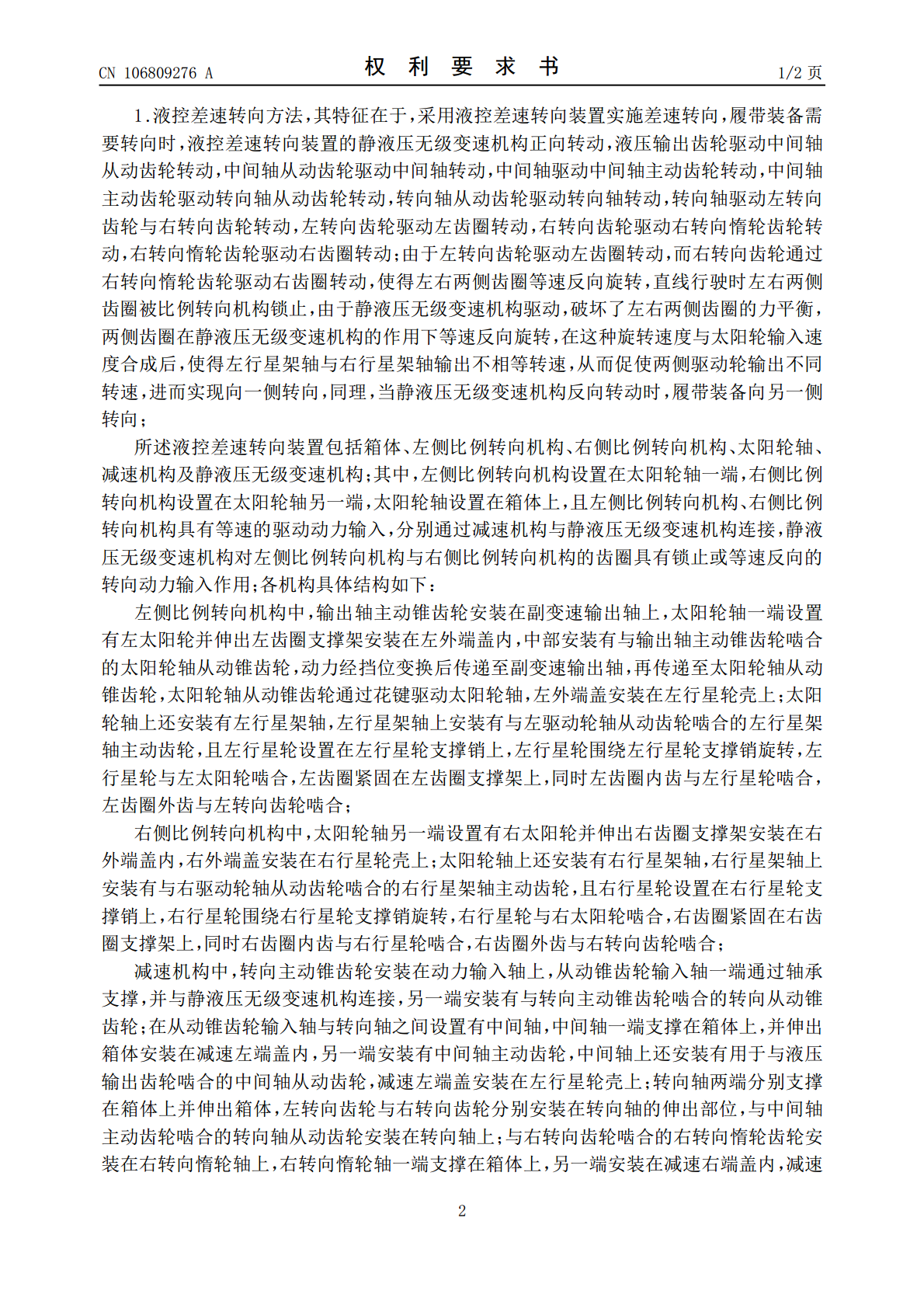
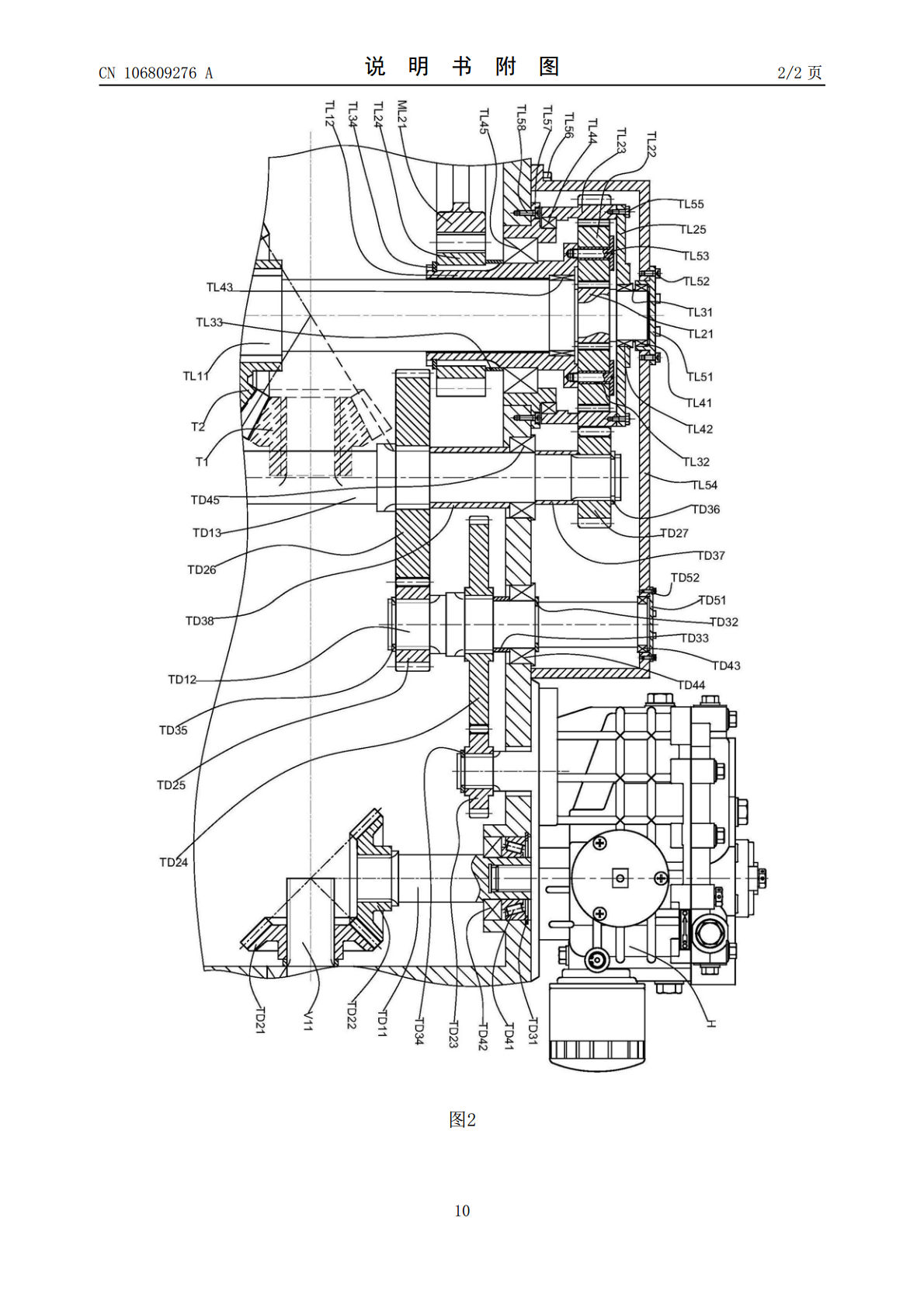
液控差速转向方法,采用液控差速转向装置实施差速转向,履带装备需要转向时,静液压无级变速机构正向转动,从而带动左侧比例转向机构与右侧比例转向机构齿圈等速反向旋转,由于静液压无级变速机构驱动,破坏了左右两侧齿圈的力平衡,两侧齿圈在静液压无级变速机构的作用下等速反向旋转,在这种旋转速度与太阳轮输入速度合成后,使得左行星架轴与右行星架轴输出不相等转速,从而促使两侧驱动轮输出不同转速,进而实现向一侧转向,同理,当静液压无级变速机构反向转动时,履带装备向另一侧转向;使得履带装备具有转向角速度与静液压无级变速机构调速幅
液控比例差速传动方法.pdf
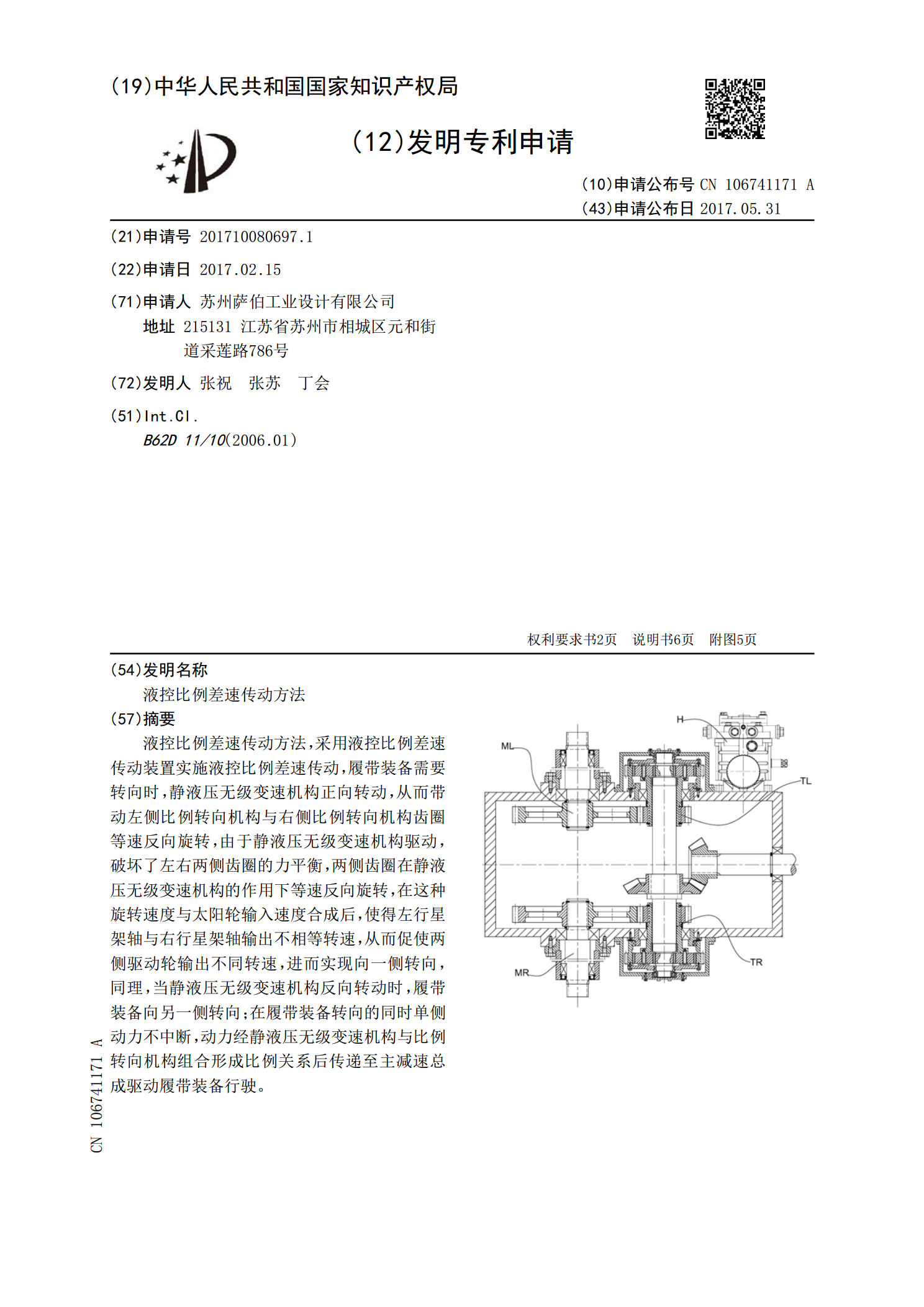
液控比例差速传动方法,采用液控比例差速传动装置实施液控比例差速传动,履带装备需要转向时,静液压无级变速机构正向转动,从而带动左侧比例转向机构与右侧比例转向机构齿圈等速反向旋转,由于静液压无级变速机构驱动,破坏了左右两侧齿圈的力平衡,两侧齿圈在静液压无级变速机构的作用下等速反向旋转,在这种旋转速度与太阳轮输入速度合成后,使得左行星架轴与右行星架轴输出不相等转速,从而促使两侧驱动轮输出不同转速,进而实现向一侧转向,同理,当静液压无级变速机构反向转动时,履带装备向另一侧转向;在履带装备转向的同时单侧动力不中断,

视觉AGV差速转向控制方法研究.docx
视觉AGV差速转向控制方法研究随着工业自动化的发展,自动导航车(AGV)在工厂内扮演着越来越重要的角色。AGV是一种自动运输车辆,通常用于在工厂内从一个地方到另一个地方运送物品。视觉AGV是一种AGV,它利用机器视觉技术实现自动导航。本文将讨论视觉AGV差速转向控制方法研究。首先,我们先了解一下什么是AGV的差速转向控制。差速转向是一种AGV转向技术,它利用两辆车轮的不同速度来改变车辆的方向。例如,如果左侧的车轮转速较慢,而右侧的车轮转速较快,车辆将向左转。差速转向控制是一种基于此原理的控制技术,用于控制
液控比例转向方法.pdf
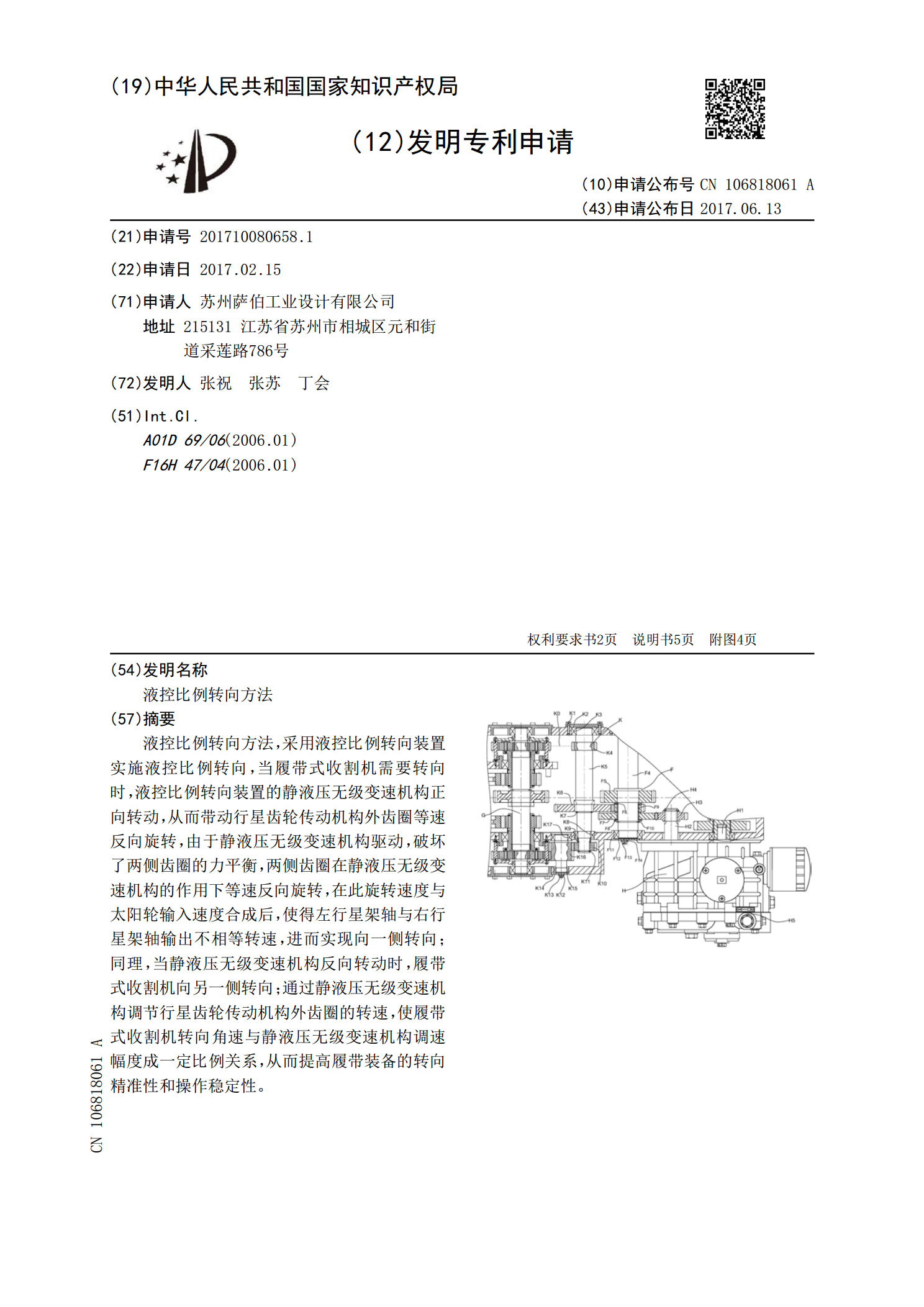
液控比例转向方法,采用液控比例转向装置实施液控比例转向,当履带式收割机需要转向时,液控比例转向装置的静液压无级变速机构正向转动,从而带动行星齿轮传动机构外齿圈等速反向旋转,由于静液压无级变速机构驱动,破坏了两侧齿圈的力平衡,两侧齿圈在静液压无级变速机构的作用下等速反向旋转,在此旋转速度与太阳轮输入速度合成后,使得左行星架轴与右行星架轴输出不相等转速,进而实现向一侧转向;同理,当静液压无级变速机构反向转动时,履带式收割机向另一侧转向;通过静液压无级变速机构调节行星齿轮传动机构外齿圈的转速,使履带式收割机转向
主动差速转向装置.pdf
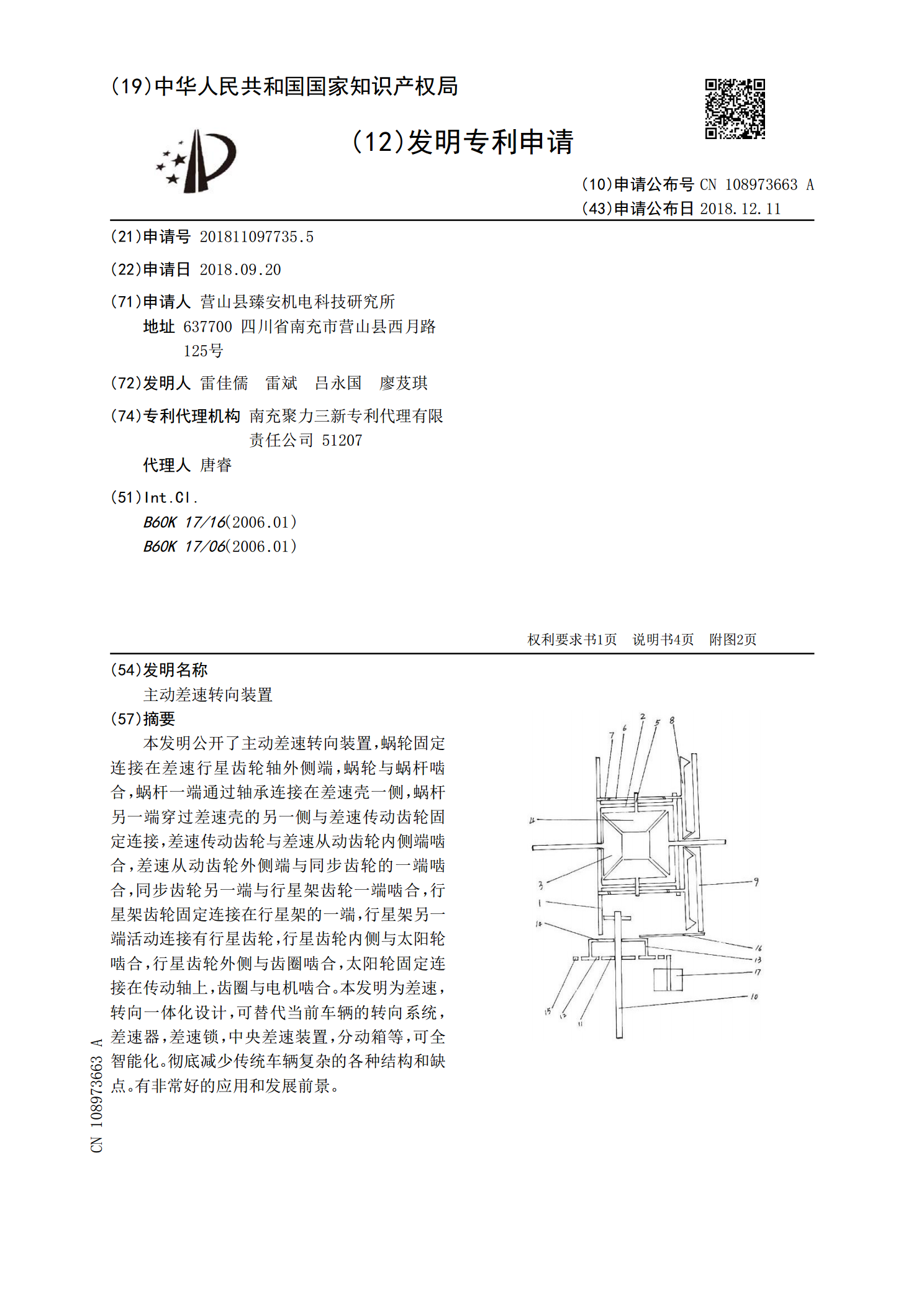
本发明公开了主动差速转向装置,蜗轮固定连接在差速行星齿轮轴外侧端,蜗轮与蜗杆啮合,蜗杆一端通过轴承连接在差速壳一侧,蜗杆另一端穿过差速壳的另一侧与差速传动齿轮固定连接,差速传动齿轮与差速从动齿轮内侧端啮合,差速从动齿轮外侧端与同步齿轮的一端啮合,同步齿轮另一端与行星架齿轮一端啮合,行星架齿轮固定连接在行星架的一端,行星架另一端活动连接有行星齿轮,行星齿轮内侧与太阳轮啮合,行星齿轮外侧与齿圈啮合,太阳轮固定连接在传动轴上,齿圈与电机啮合。本发明为差速,转向一体化设计,可替代当前车辆的转向系统,差速器,差速锁