
一种用于隧道工作机器人的行走底盘.pdf

思洁****爱吗

1/5
2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于隧道工作机器人的行走底盘.pdf
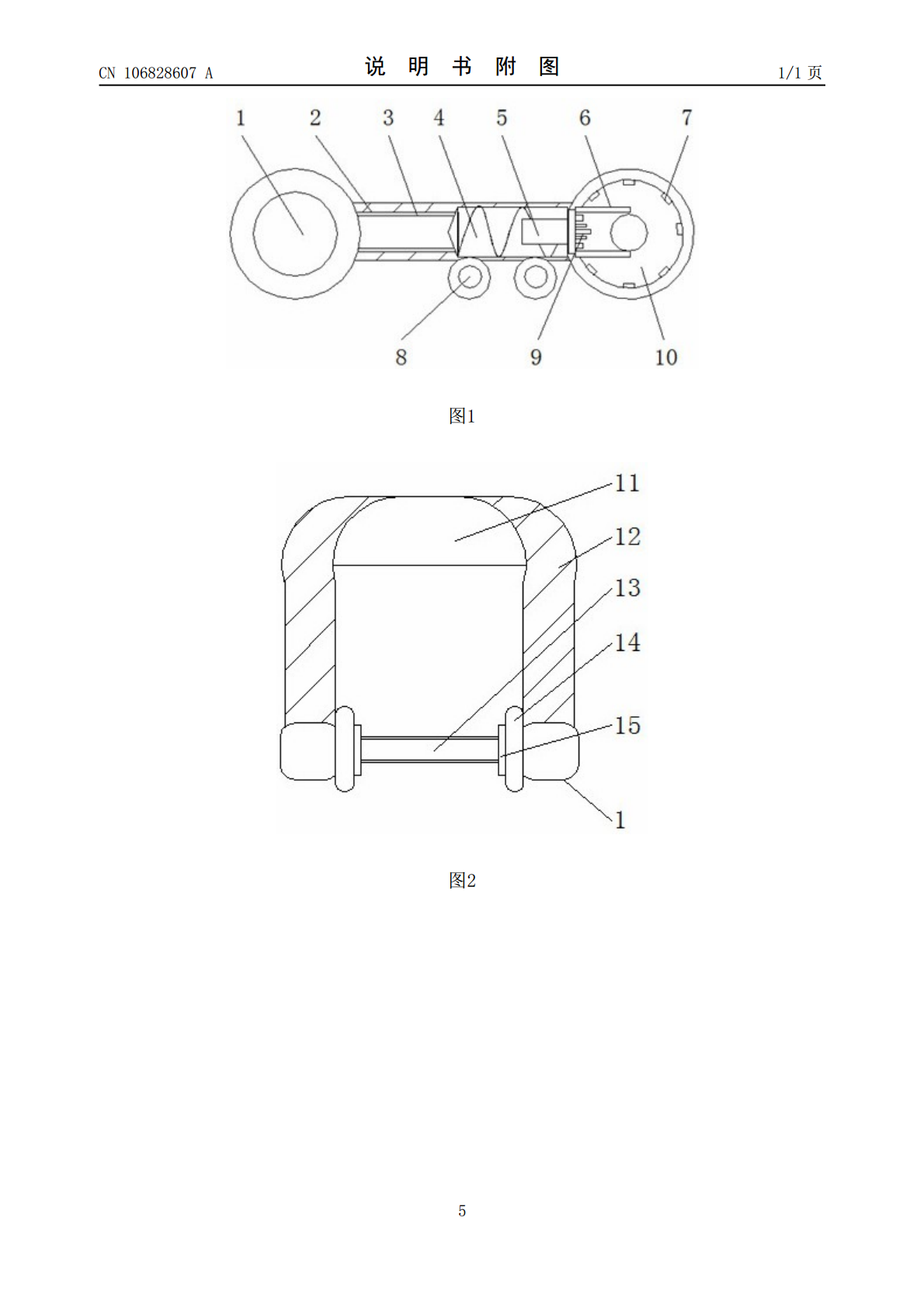
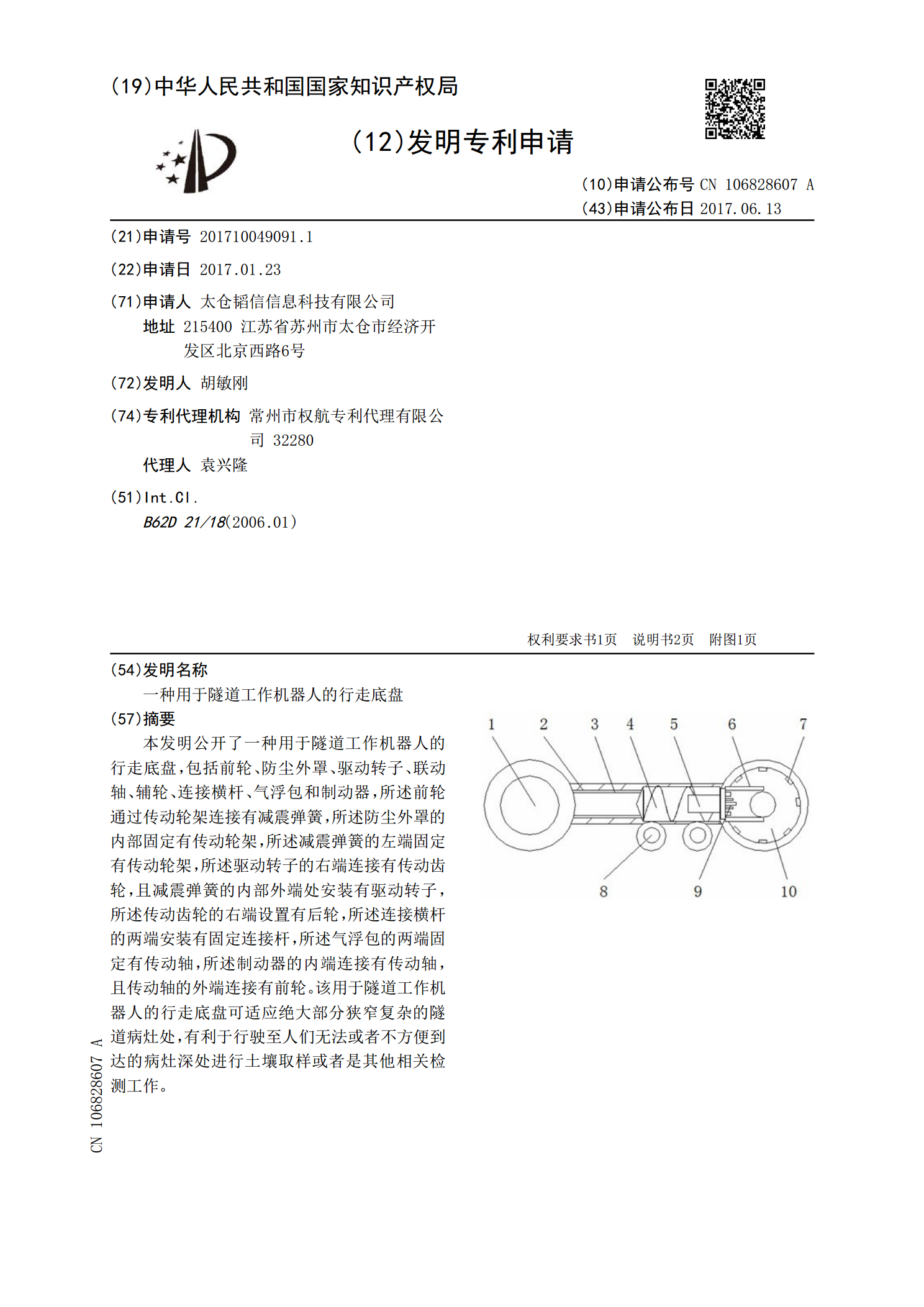
本发明公开了一种用于隧道工作机器人的行走底盘,包括前轮、防尘外罩、驱动转子、联动轴、辅轮、连接横杆、气浮包和制动器,所述前轮通过传动轮架连接有减震弹簧,所述防尘外罩的内部固定有传动轮架,所述减震弹簧的左端固定有传动轮架,所述驱动转子的右端连接有传动齿轮,且减震弹簧的内部外端处安装有驱动转子,所述传动齿轮的右端设置有后轮,所述连接横杆的两端安装有固定连接杆,所述气浮包的两端固定有传动轴,所述制动器的内端连接有传动轴,且传动轴的外端连接有前轮。该用于隧道工作机器人的行走底盘可适应绝大部分狭窄复杂的隧道病灶处,

用于车辆智能服务机器人的行走底盘.pdf
本发明涉及行走机构,具体涉及一种可应对复杂路面情况、行走更加稳定且重心更低的用于车辆智能服务机器人的行走底盘,包括底盘本体(1)、前行走轮组(2)、后行走轮组(3)、驱动轮(4)、减速电机(5)、减震弹簧(6)和站立踏板(7),所述前行走轮组(2)和后行走轮组(3)分别安装底盘本体(1)的前方和后方且与底盘本体(1)转动配合,所述前行走轮组(2)和后行走轮组(3)还通过减震弹簧(6)与底盘本体(1)相连接,所述驱动轮(4)安装在底盘本体(1)的中间位置,所述减速电机(5)安装在底盘本体(1)上且与驱动轮(

一种行走底盘机构及机器人.pdf
本发明提供的行走底盘机构,回转电机制动时,通过分别控制两个驱动轮同速同向运行,实现底盘机构的向前或向后行走;回转电机制动时,控制两个驱动轮的差速同向运行,实现底盘机构的转弯;回转电机制动时,控制两个驱动轮同速反向运行,实现底盘机构的原地回转;当回转电机处于驱动状态时,并控制两个驱动轮的同速反向运行,使驱动轮架的前向与底盘的前向形成一定的偏角,然后再使两个驱动轮同速同向运行,达到向任意方向平移的目的,不仅可实现行走底盘机构的前后行走和前后转弯行走,还可以实现向任意方向的平移及原地回转。本发明还提供一种具有本

一种机器人行走底盘装置.pdf
本发明提供一种机器人行走底盘装置,包括行走底盘装置本体,所述行走底盘装置本体包括托台、升降仓、缓冲锁定组件和抬升机构,所述托台的底部一端安装有前驱动轮,所述托台底部的另一端安装有后辅助轮,所述前驱动轮的内侧设置有驱动系统,且该驱动系统与上方的机器人本体的控制系统部分相连接,所述托台的顶部安装有升降仓,该机器人行走底盘装置在后辅助轮的内侧加装有抬升机构,利用该结构将支撑滚筒向下压,即可将后辅助轮顶部的托台区域向上翘起,即可提高斜面上行走的稳定性,将抬升机构和缓冲锁定组件进行整合,通过整合后的结构即可实现不同
一种行走轮可切换的机器人底盘.pdf
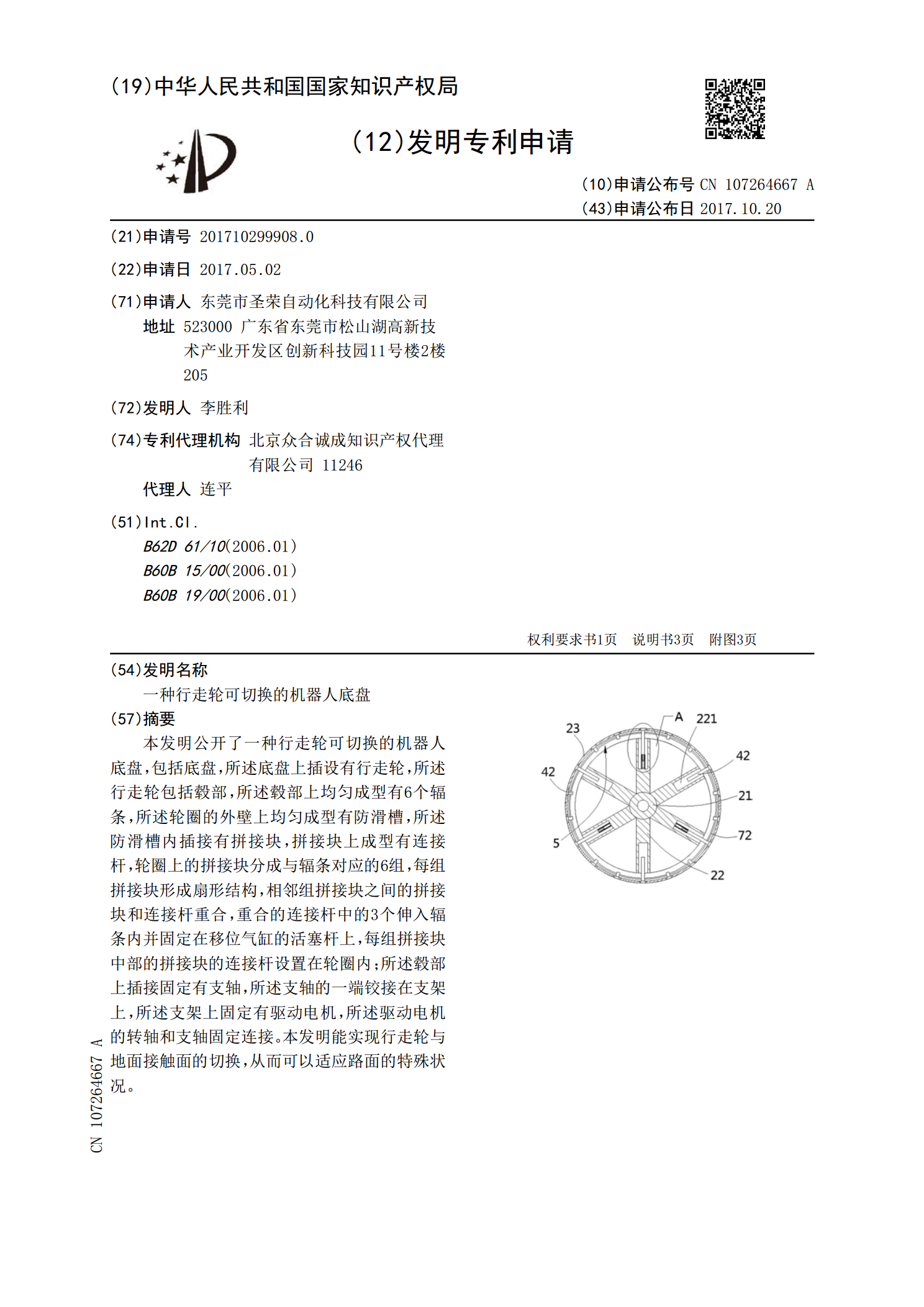
本发明公开了一种行走轮可切换的机器人底盘,包括底盘,所述底盘上插设有行走轮,所述行走轮包括毂部,所述毂部上均匀成型有6个辐条,所述轮圈的外壁上均匀成型有防滑槽,所述防滑槽内插接有拼接块,拼接块上成型有连接杆,轮圈上的拼接块分成与辐条对应的6组,每组拼接块形成扇形结构,相邻组拼接块之间的拼接块和连接杆重合,重合的连接杆中的3个伸入辐条内并固定在移位气缸的活塞杆上,每组拼接块中部的拼接块的连接杆设置在轮圈内;所述毂部上插接固定有支轴,所述支轴的一端铰接在支架上,所述支架上固定有驱动电机,所述驱动电机的转轴和支