
一种机器人行走底盘装置.pdf

新月****姐a


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人行走底盘装置.pdf
本发明提供一种机器人行走底盘装置,包括行走底盘装置本体,所述行走底盘装置本体包括托台、升降仓、缓冲锁定组件和抬升机构,所述托台的底部一端安装有前驱动轮,所述托台底部的另一端安装有后辅助轮,所述前驱动轮的内侧设置有驱动系统,且该驱动系统与上方的机器人本体的控制系统部分相连接,所述托台的顶部安装有升降仓,该机器人行走底盘装置在后辅助轮的内侧加装有抬升机构,利用该结构将支撑滚筒向下压,即可将后辅助轮顶部的托台区域向上翘起,即可提高斜面上行走的稳定性,将抬升机构和缓冲锁定组件进行整合,通过整合后的结构即可实现不同

行走装置底盘和机器人.pdf
本发明公开了一种行走装置底盘和机器人。本发明的行走装置底盘包括底盘本体、两个驱动轮、第一万向轮和第二万向轮。两个驱动轮分别设置于底盘本体的横向左右两侧。第一万向轮和第二万向轮设置于底盘本体上且在纵向方向上相互错开并位于两个驱动轮的同一侧。本发明的行走装置底盘在通过凹入部障碍时,第一万向轮会先运行到凹入部障碍的上方,此时第二万向轮与两个驱动轮共同支撑底盘本体,因此底盘依旧可以保持平稳运动,第一万向轮不会陷入凹入部中。随着底盘运动,第一万向轮越过凹入部,第二万向轮运行到凹入部上方,此时由于第一万向轮与两个驱动
一种爬壁磁吸附机器人的行走底盘装置.pdf
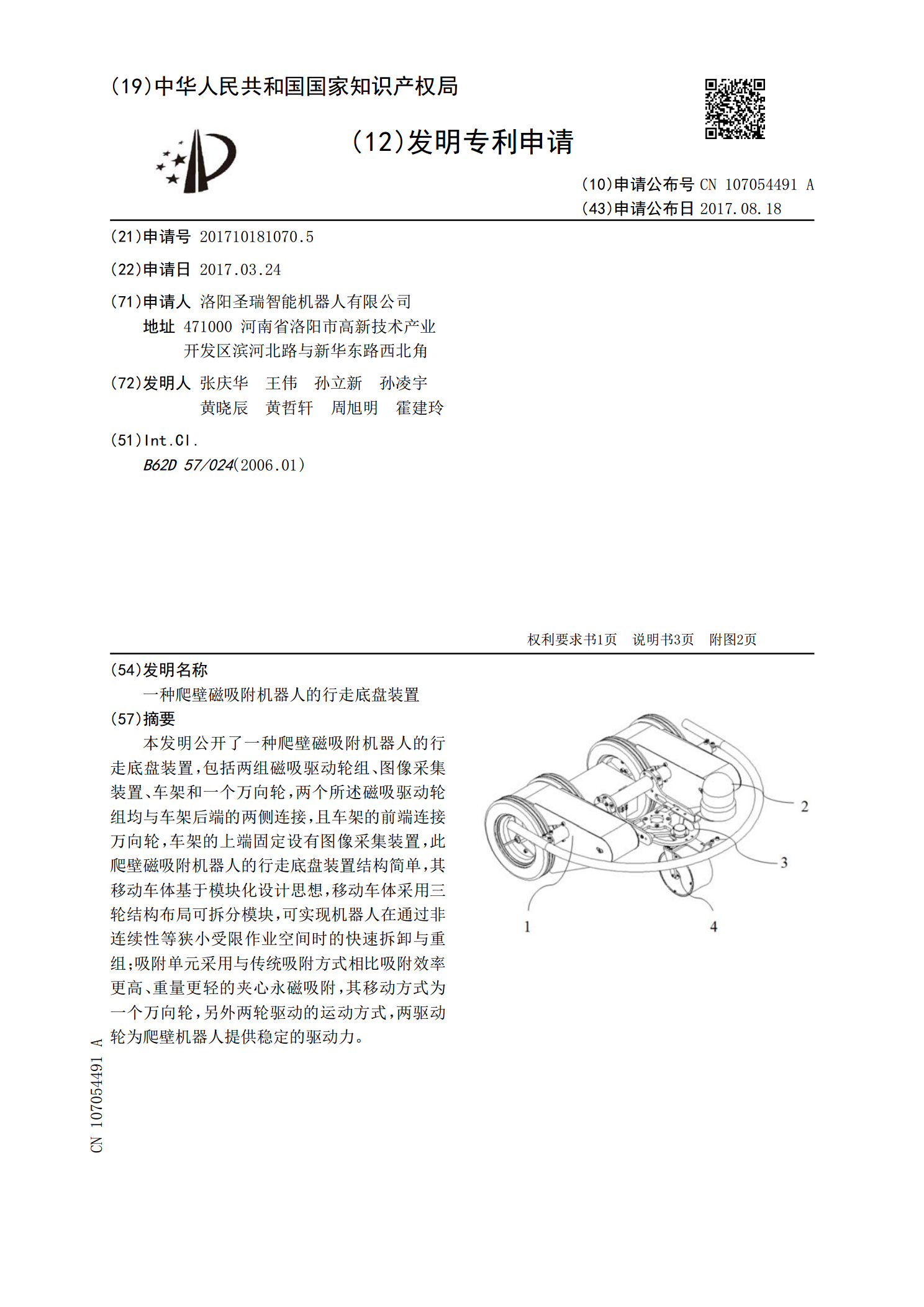
本发明公开了一种爬壁磁吸附机器人的行走底盘装置,包括两组磁吸驱动轮组、图像采集装置、车架和一个万向轮,两个所述磁吸驱动轮组均与车架后端的两侧连接,且车架的前端连接万向轮,车架的上端固定设有图像采集装置,此爬壁磁吸附机器人的行走底盘装置结构简单,其移动车体基于模块化设计思想,移动车体采用三轮结构布局可拆分模块,可实现机器人在通过非连续性等狭小受限作业空间时的快速拆卸与重组;吸附单元采用与传统吸附方式相比吸附效率更高、重量更轻的夹心永磁吸附,其移动方式为一个万向轮,另外两轮驱动的运动方式,两驱动轮为爬壁机器人

一种行走底盘机构及机器人.pdf
本发明提供的行走底盘机构,回转电机制动时,通过分别控制两个驱动轮同速同向运行,实现底盘机构的向前或向后行走;回转电机制动时,控制两个驱动轮的差速同向运行,实现底盘机构的转弯;回转电机制动时,控制两个驱动轮同速反向运行,实现底盘机构的原地回转;当回转电机处于驱动状态时,并控制两个驱动轮的同速反向运行,使驱动轮架的前向与底盘的前向形成一定的偏角,然后再使两个驱动轮同速同向运行,达到向任意方向平移的目的,不仅可实现行走底盘机构的前后行走和前后转弯行走,还可以实现向任意方向的平移及原地回转。本发明还提供一种具有本

行走装置及运动底盘.pdf
本发明公开了一种行走装置及运动底盘,行走装置包括:行走轮,行走轮具有轮面;多个变形块,多个变形块沿周向布置且可枢转地设在行走轮上,每个变形块具有枢转部,且每个变形块具有第一状态和第二状态;其中,第一状态时变形块位于轮面的内侧;第二状态时变形块至少部分伸出轮面,变形块的伸出轮面的部分构成伸出部,伸出部为凸齿状,且沿行走轮的转动方向上伸出部位于枢转部的前方。本发明通过行走轮上设置多个变形块,每个变形块具有第一状态和第二状态,使得行走轮具备可切换的正常形态和越野形态,正常形态下行走轮以较高速度行驶,越野形态下行