
一种行走轮可切换的机器人底盘.pdf

雨巷****凝海


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种行走轮可切换的机器人底盘.pdf
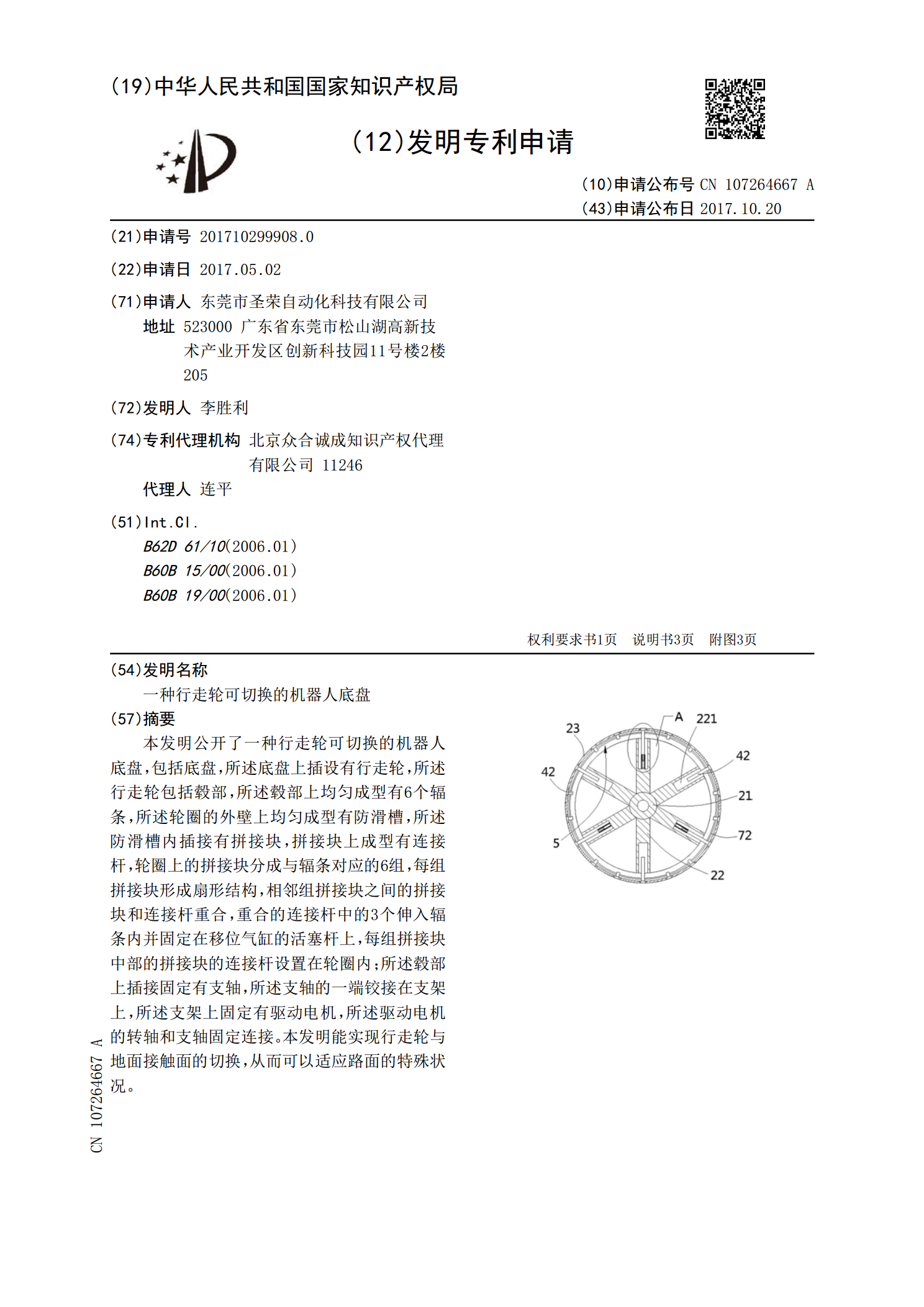
本发明公开了一种行走轮可切换的机器人底盘,包括底盘,所述底盘上插设有行走轮,所述行走轮包括毂部,所述毂部上均匀成型有6个辐条,所述轮圈的外壁上均匀成型有防滑槽,所述防滑槽内插接有拼接块,拼接块上成型有连接杆,轮圈上的拼接块分成与辐条对应的6组,每组拼接块形成扇形结构,相邻组拼接块之间的拼接块和连接杆重合,重合的连接杆中的3个伸入辐条内并固定在移位气缸的活塞杆上,每组拼接块中部的拼接块的连接杆设置在轮圈内;所述毂部上插接固定有支轴,所述支轴的一端铰接在支架上,所述支架上固定有驱动电机,所述驱动电机的转轴和支

一种可切换轮履两种行走模式的挖掘机底盘.pdf
本发明揭示了一种可切换轮履两种行走模式的挖掘机底盘,所述底盘包括车架、及两个相互平行地设置在车架两侧的履带装置,所述两个履带装置均包括驱动轮、张紧轮、多个负重轮、多个托链轮、多个升降装置、以及履带,该挖掘机底盘结构合理,可根据工作需求与路面情况实时切换行走方式,使得挖掘机均适应于泥路和公路行驶,挖掘机自身可以完成转场,不需要其他机械运输,机动性能强,工作范围广,并且轮、履切换方便、快速。

一种轮履可切换全向移动底盘.pdf
本发明公开了一种轮履可切换全向移动底盘,包括移动底盘主体、履带、驱动电机、麦克纳姆轮、支撑底板、底盘框架、车履切换组件、履带驱动部和履带驱动电机总成,移动底盘主体的中部外壁上固定设置有底盘框架,底盘框架的底端外壁上焊接固定有支撑底板,底盘框架的两侧底端外壁上转动连接有麦克纳姆轮;该发明结构较为简单综合了履带移动底盘与麦克纳姆轮移动底盘的优点,使后期机器人既能够跨越障碍又能够实现全向运动,同时也实现了两种模式的快速切换,用于麦克纳姆轮组升降的回转轴与电机驱动轴垂直布局,通过一个气缸驱动实现两侧轮子的同时升降

一种可实现轮履切换的变体轮式行走装置.pdf
一种可实现轮履切换的变体轮式行走装置,包括主轴、轮辐总成、轮辋总成、变换及张紧机构、可切换传动机构,轮辐总成安装在主轴上,轮辋总成连接在轮辐总成上,轮辋总成的外圈通过多个承重轮组安装有履带,变换及张紧机构可以带动轮辋总成进行旋转变形,从而使履带的截面形状在圆形和三角形之间变换并对履带进行张紧,可切换传动机构能够在履带的截面形状为圆形和三角形时分别传递主轴的旋转,从而驱动装置的行走。本发明从多个方面对现有的变体轮式行走装置做出改进,克服了现有的变体轮式行走装置存在的多种不足,适应实际使用需求。

一种行走底盘机构及机器人.pdf
本发明提供的行走底盘机构,回转电机制动时,通过分别控制两个驱动轮同速同向运行,实现底盘机构的向前或向后行走;回转电机制动时,控制两个驱动轮的差速同向运行,实现底盘机构的转弯;回转电机制动时,控制两个驱动轮同速反向运行,实现底盘机构的原地回转;当回转电机处于驱动状态时,并控制两个驱动轮的同速反向运行,使驱动轮架的前向与底盘的前向形成一定的偏角,然后再使两个驱动轮同速同向运行,达到向任意方向平移的目的,不仅可实现行走底盘机构的前后行走和前后转弯行走,还可以实现向任意方向的平移及原地回转。本发明还提供一种具有本