
多无人车协同遍历任务的智能路径规划方法.pdf

猫巷****晓容


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多无人车协同遍历任务的智能路径规划方法.pdf
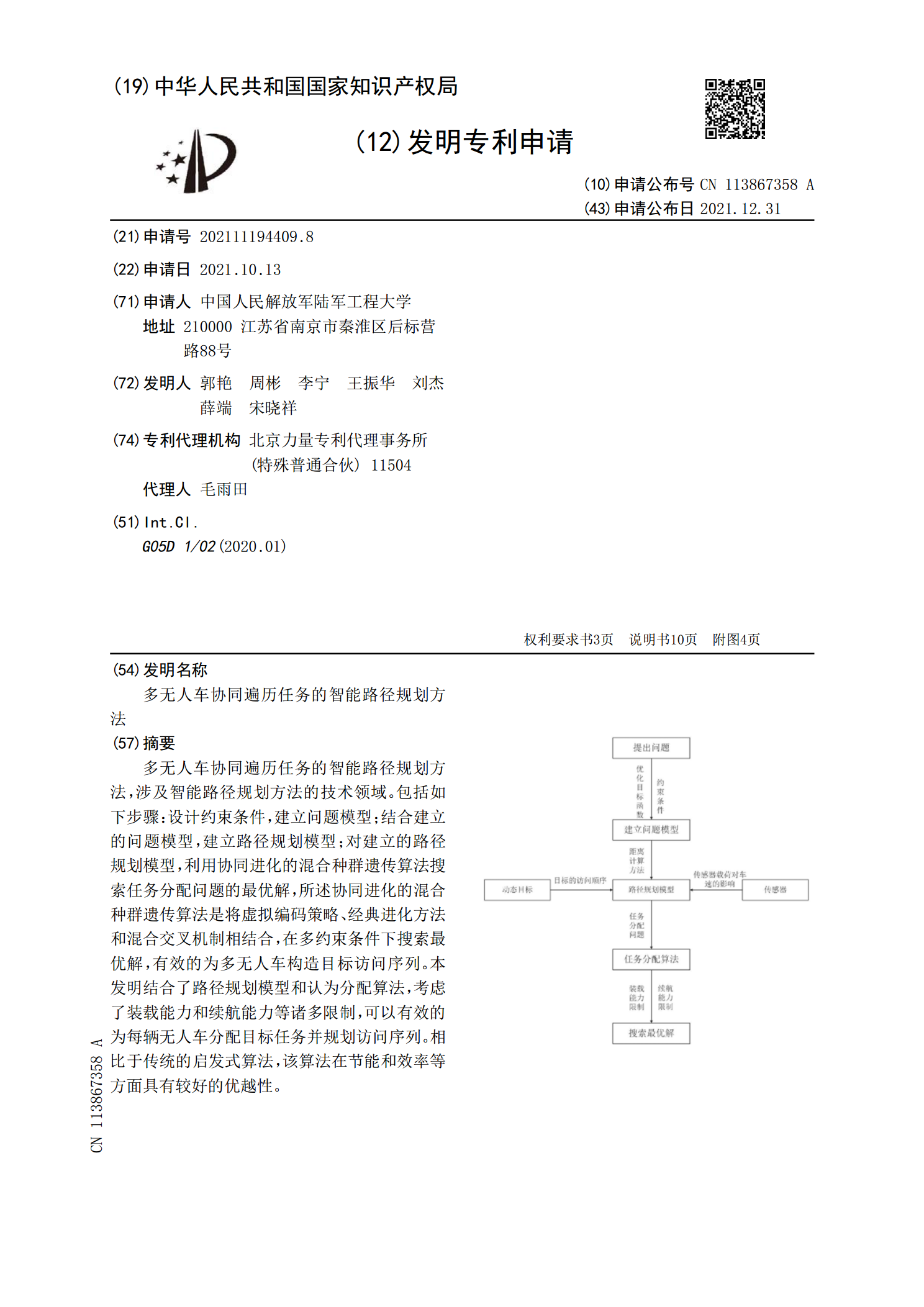
多无人车协同遍历任务的智能路径规划方法,涉及智能路径规划方法的技术领域。包括如下步骤:设计约束条件,建立问题模型;结合建立的问题模型,建立路径规划模型;对建立的路径规划模型,利用协同进化的混合种群遗传算法搜索任务分配问题的最优解,所述协同进化的混合种群遗传算法是将虚拟编码策略、经典进化方法和混合交叉机制相结合,在多约束条件下搜索最优解,有效的为多无人车构造目标访问序列。本发明结合了路径规划模型和认为分配算法,考虑了装载能力和续航能力等诸多限制,可以有效的为每辆无人车分配目标任务并规划访问序列。相比于传统的

多智能车协同编队与运动规划方法的研究的任务书.docx
多智能车协同编队与运动规划方法的研究的任务书任务书一、背景自动驾驶技术的兴起,使得无人驾驶的应用得以快速发展。多智能车协同编队技术是自动驾驶技术中的重要组成部分,可以实现车辆之间的信息共享和协同控制,提高安全性和行车效率。但是目前多智能车协同编队技术存在运动规划不够精确和实时性差的问题,建立高效的运动规划方法是解决这一问题的关键。二、任务概述本次研究的任务是,基于多智能车协同编队技术,研究其中的运动规划方法,解决目前存在的精度不足和实时性差的问题,使得车队的运行更加高效和安全。具体研究任务如下:1.研究多
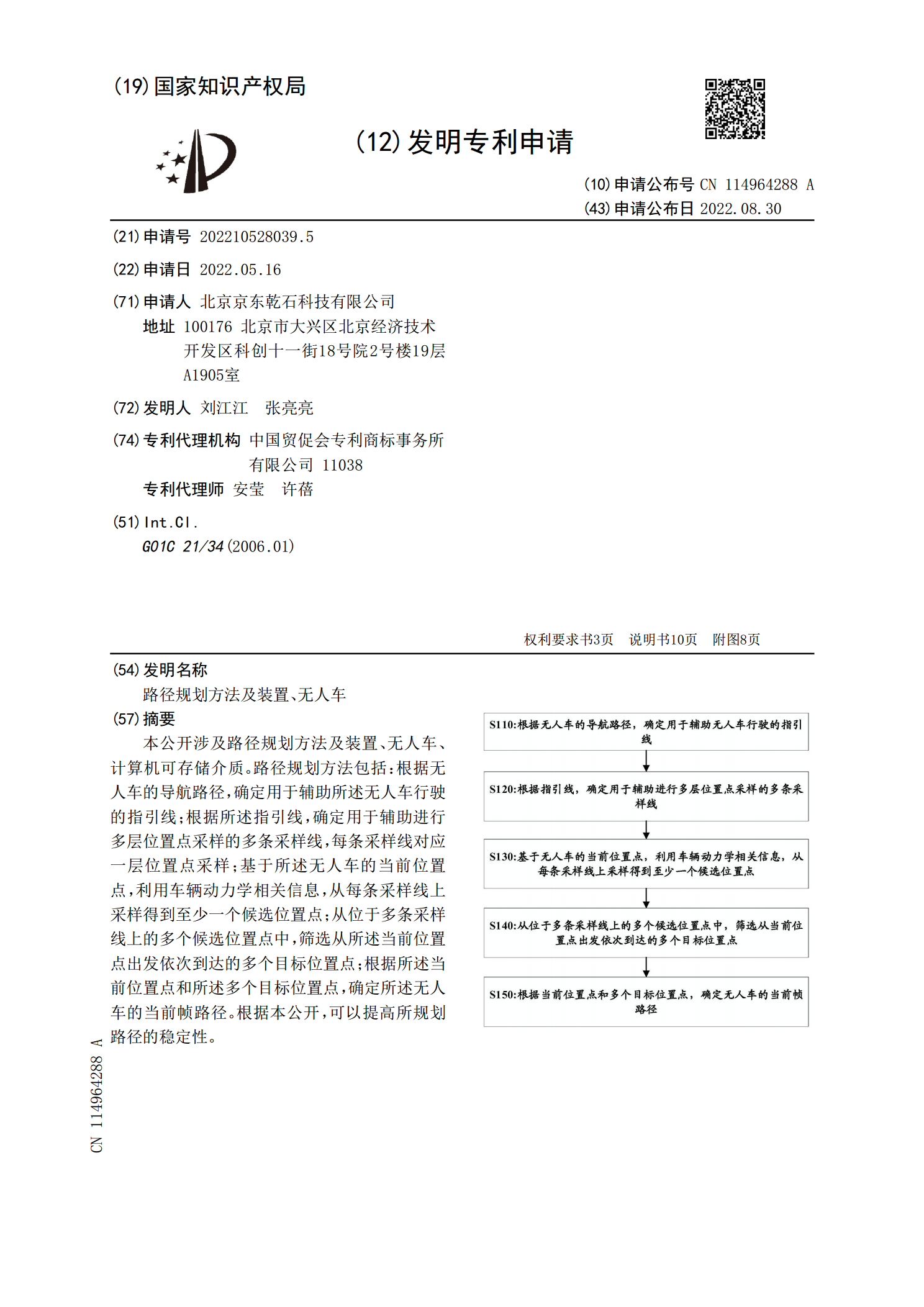
路径规划方法及装置、无人车.pdf
本公开涉及路径规划方法及装置、无人车、计算机可存储介质。路径规划方法包括:根据无人车的导航路径,确定用于辅助所述无人车行驶的指引线;根据所述指引线,确定用于辅助进行多层位置点采样的多条采样线,每条采样线对应一层位置点采样;基于所述无人车的当前位置点,利用车辆动力学相关信息,从每条采样线上采样得到至少一个候选位置点;从位于多条采样线上的多个候选位置点中,筛选从所述当前位置点出发依次到达的多个目标位置点;根据所述当前位置点和所述多个目标位置点,确定所述无人车的当前帧路径。根据本公开,可以提高所规划路径的稳定性

基于深度强化学习的多无人车协同路径规划方法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于深度强化学习的多无人车协同路径规划方法目录一、内容简述................................................21.研究背景与意义........................................22.国内外研究现状........................................33.研究内容与方法........................................4
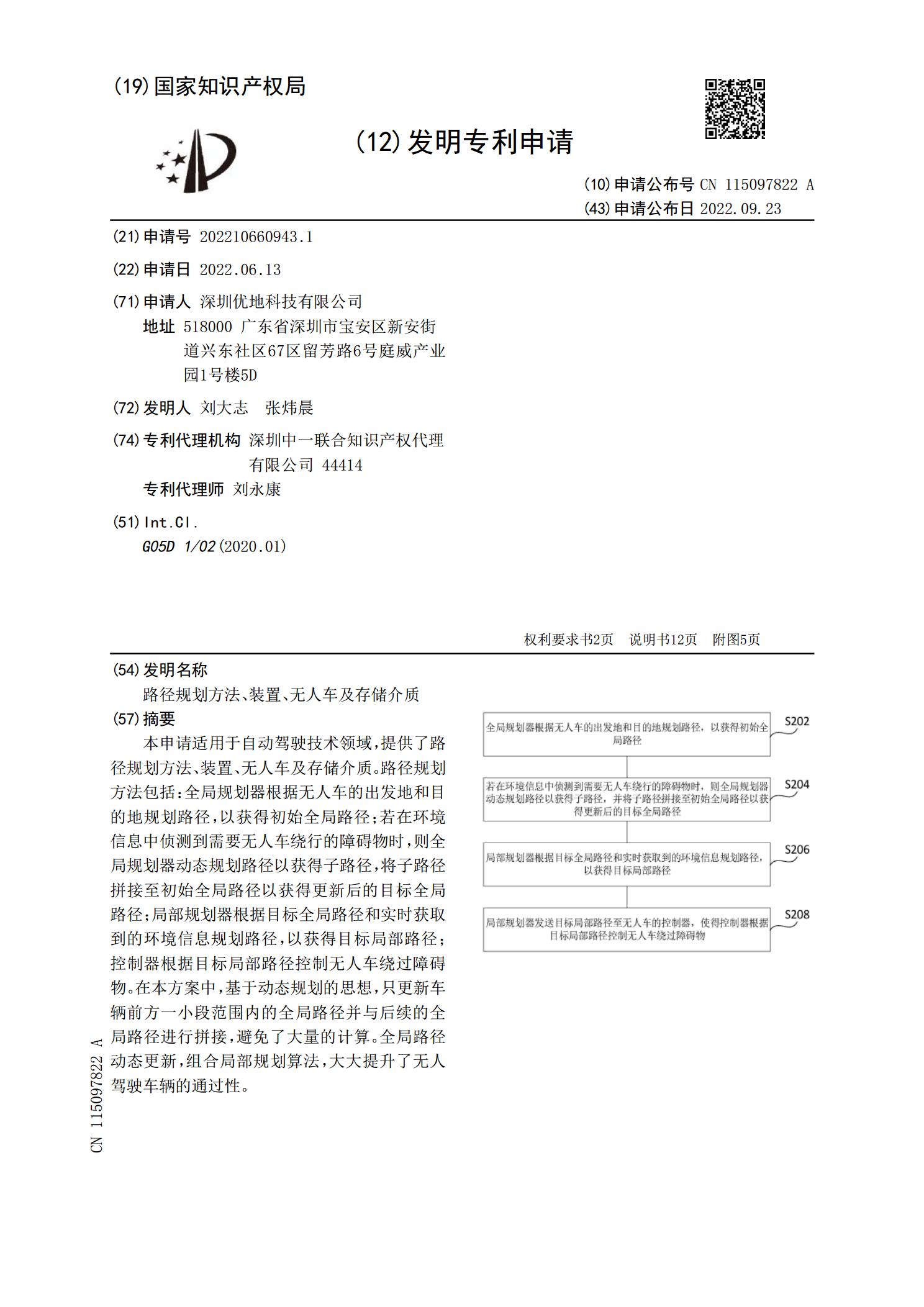
路径规划方法、装置、无人车及存储介质.pdf
本申请适用于自动驾驶技术领域,提供了路径规划方法、装置、无人车及存储介质。路径规划方法包括:全局规划器根据无人车的出发地和目的地规划路径,以获得初始全局路径;若在环境信息中侦测到需要无人车绕行的障碍物时,则全局规划器动态规划路径以获得子路径,将子路径拼接至初始全局路径以获得更新后的目标全局路径;局部规划器根据目标全局路径和实时获取到的环境信息规划路径,以获得目标局部路径;控制器根据目标局部路径控制无人车绕过障碍物。在本方案中,基于动态规划的思想,只更新车辆前方一小段范围内的全局路径并与后续的全局路径进行拼