
一种基于机器视觉的在线PE瓶识别定位方法.pdf

猫巷****奕声

1/7

2/7

3/7
4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于机器视觉的在线PE瓶识别定位方法.pdf
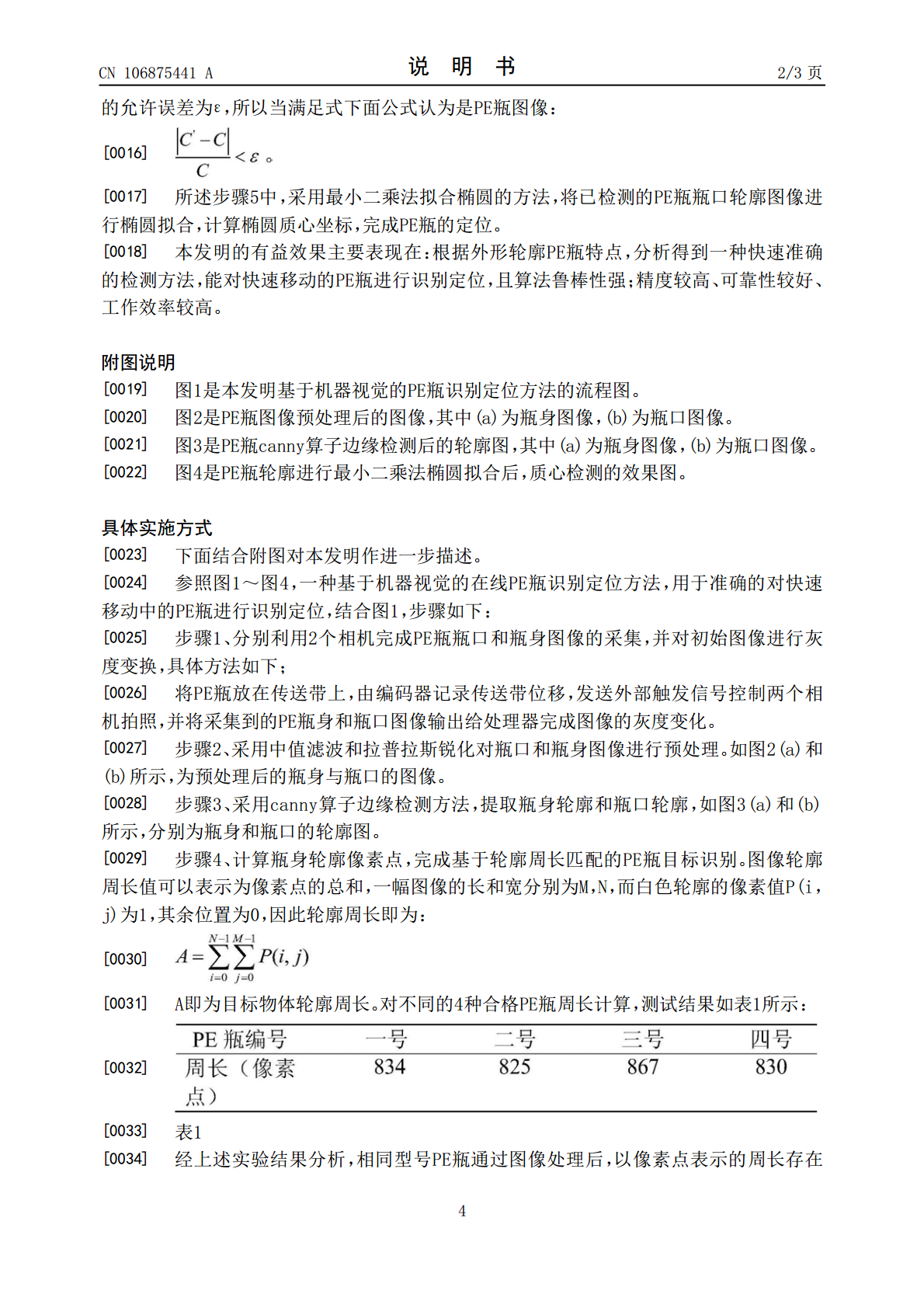
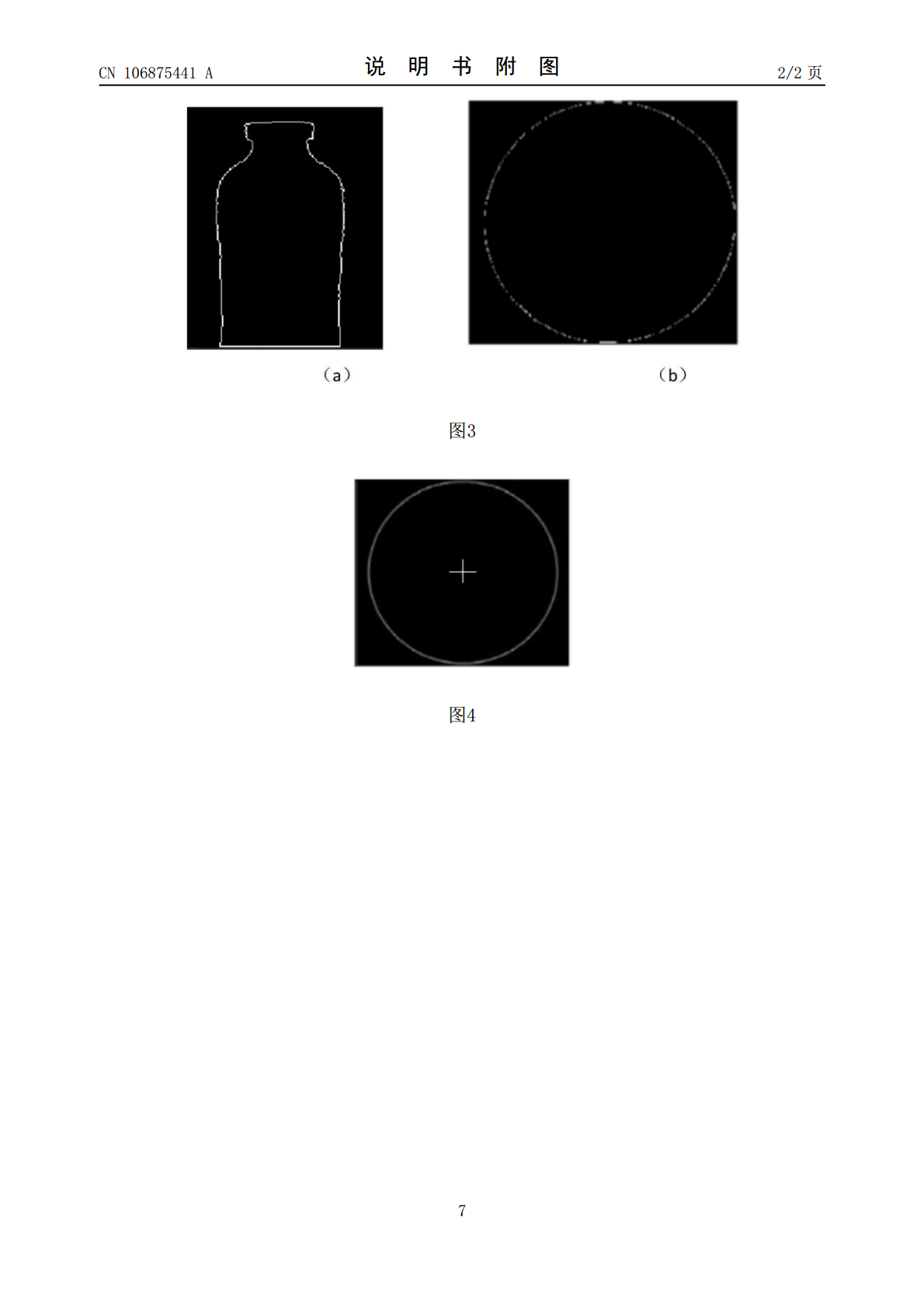
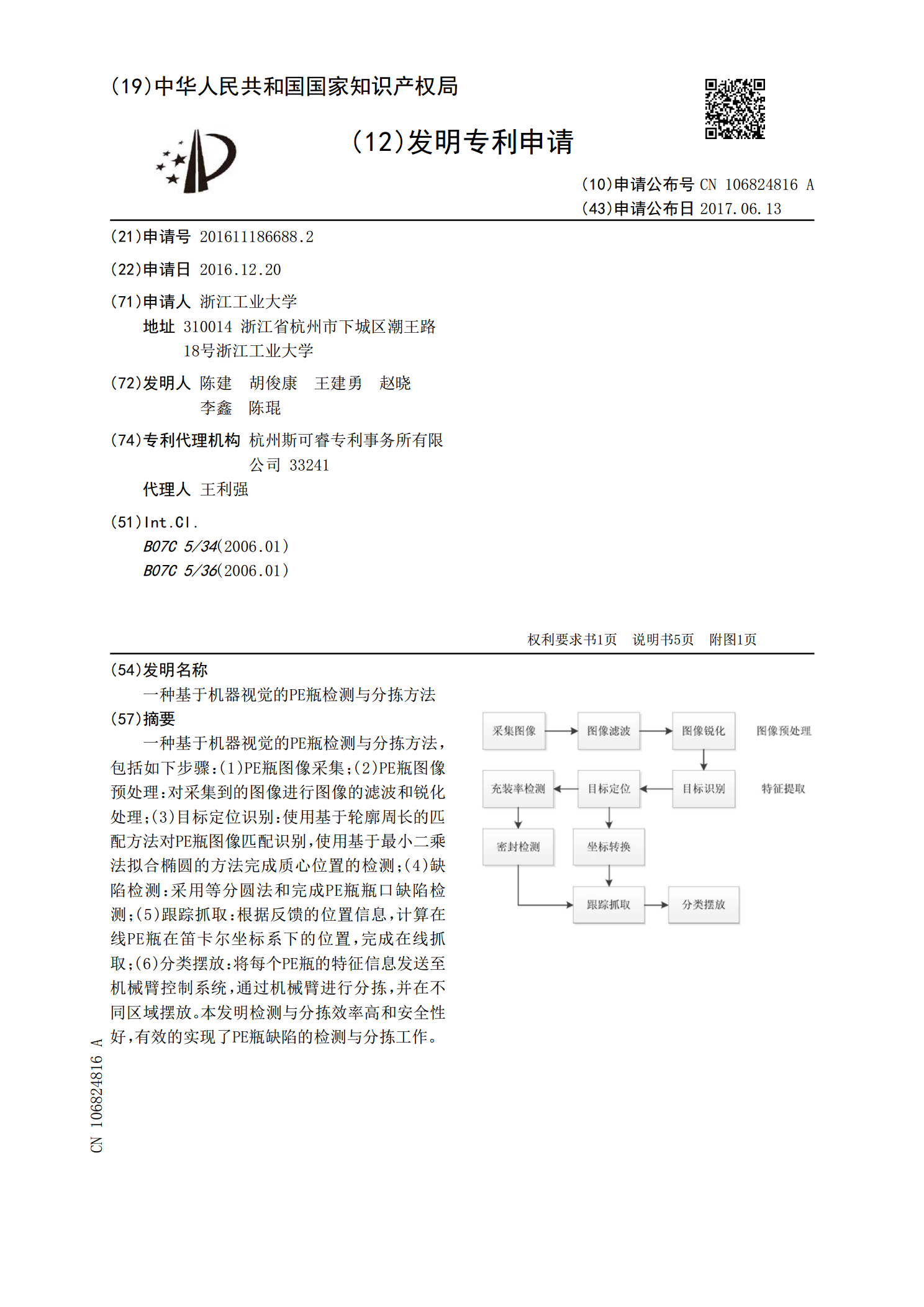
一种基于机器视觉的在线PE瓶识别定位方法,包括如下步骤:步骤1、分别利用2个相机完成PE瓶瓶口和瓶身图像的采集,并对初始图像进行灰度变换;步骤2、采用中值滤波和拉普拉斯锐化对瓶口和瓶身图像进行预处理;步骤3、采用canny算子提取瓶身轮廓和瓶口轮廓;步骤4、计算瓶身轮廓像素点,完成基于轮廓周长匹配的PE瓶目标识别;步骤5、采用最小二乘法对图像轮廓离散点进行椭圆拟合,根据拟合完成的椭圆方程,计算椭圆质心坐标,即为PE瓶瓶口像素坐标值。该方法可以在高速运动的传送带上,准确快速的识别定位PE瓶,适用于自动化流水

一种基于机器视觉的在线PE瓶瓶口密封缺陷的检测方法.pdf
一种基于机器视觉的在线PE瓶瓶口密封缺陷的检测方法,在机器视觉检测平台上对PE瓶密封缺陷进行检测,包括步骤:(1)集PE瓶口图像,转换为灰度图;(2)对灰度图进行预处理得到阈值分割图;(3)通过边缘检测检测得到瓶口密封锡纸的内外轮廓;(4)填充内外轮廓形成圆环,将圆环等分为均匀等分,计算每等分圆像素值与给定阈值范围比较,判断缺陷是否存在。该方法可以在高速运动的传送带上,准确快判断瓶口密封缺陷,适用于自动化流水线上PE瓶的检测分拣。本发明精度较高、可靠性良好、工作效率较高。
一种基于机器视觉的PE瓶检测与分拣方法.pdf
一种基于机器视觉的PE瓶检测与分拣方法,包括如下步骤:(1)PE瓶图像采集;(2)PE瓶图像预处理:对采集到的图像进行图像的滤波和锐化处理;(3)目标定位识别:使用基于轮廓周长的匹配方法对PE瓶图像匹配识别,使用基于最小二乘法拟合椭圆的方法完成质心位置的检测;(4)缺陷检测:采用等分圆法和完成PE瓶瓶口缺陷检测;(5)跟踪抓取:根据反馈的位置信息,计算在线PE瓶在笛卡尔坐标系下的位置,完成在线抓取;(6)分类摆放:将每个PE瓶的特征信息发送至机械臂控制系统,通过机械臂进行分拣,并在不同区域摆放。本发明检测
基于机器视觉的稻株识别与定位方法.pdf
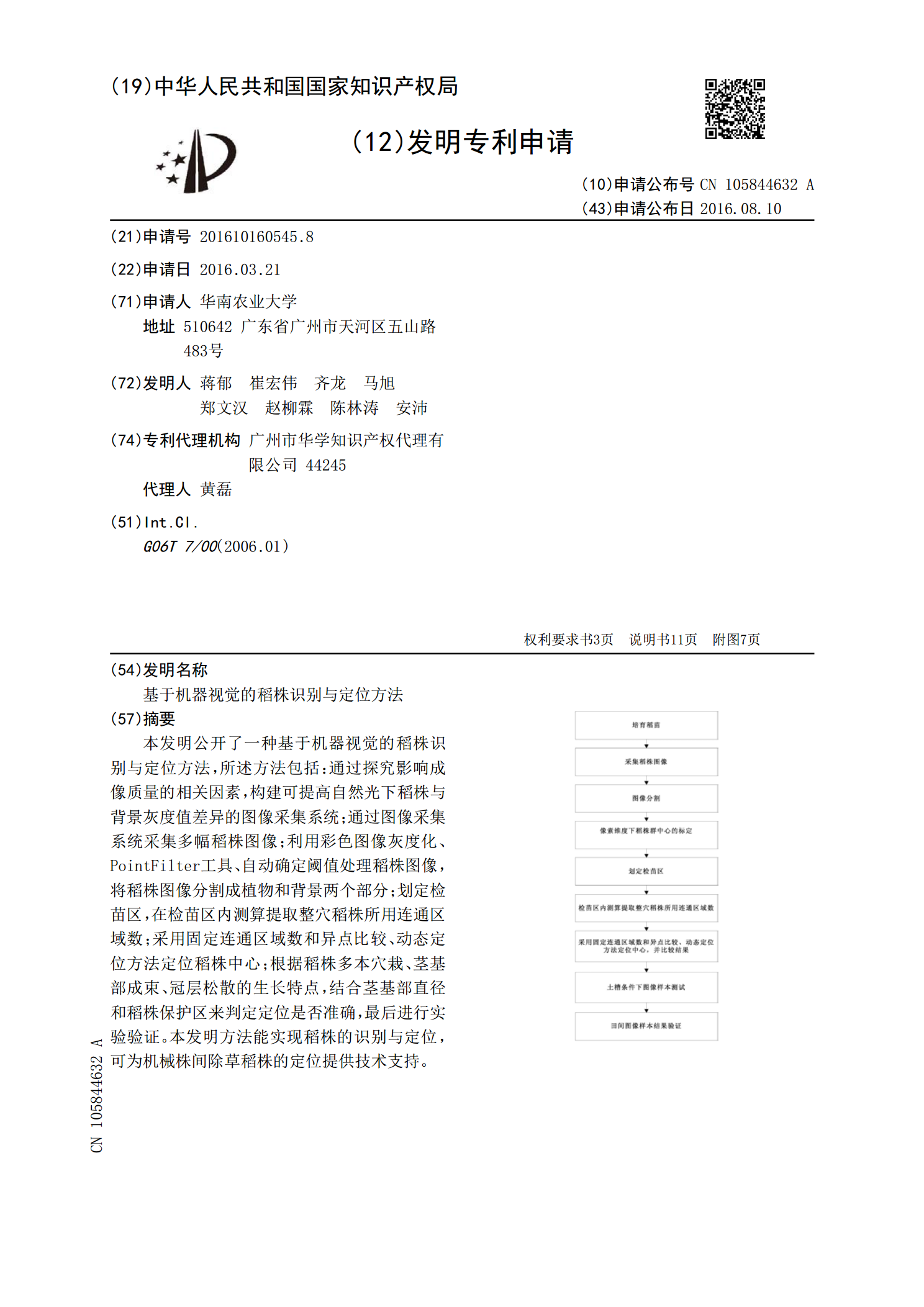
本发明公开了一种基于机器视觉的稻株识别与定位方法,所述方法包括:通过探究影响成像质量的相关因素,构建可提高自然光下稻株与背景灰度值差异的图像采集系统;通过图像采集系统采集多幅稻株图像;利用彩色图像灰度化、PointFilter工具、自动确定阈值处理稻株图像,将稻株图像分割成植物和背景两个部分;划定检苗区,在检苗区内测算提取整穴稻株所用连通区域数;采用固定连通区域数和异点比较、动态定位方法定位稻株中心;根据稻株多本穴栽、茎基部成束、冠层松散的生长特点,结合茎基部直径和稻株保护区来判定定位是否准确,最后进行实

一种基于机器视觉的PE瓶充装率的检测方法.pdf
一种基于机器视觉的PE瓶充装率的检测方法,包括如下步骤:步骤1、采集PE瓶图像,完成PE瓶图像预处理;步骤2、对预处理后的图像进行阈值分割,提取液面轮廓特征;步骤3、计算PE瓶二值图的竖直积分投影图;步骤4、寻找PE瓶二值图的液面最低点及其纵坐标;步骤5、根据瓶口到该点的距离与瓶身高度的比值,计算PE瓶充装率。该方法可检测非直线液面线状态下的PE瓶充装率。本发明提供一种精度较高、工作效率较高的基于机器视觉的PE瓶充装率检测方法。