
基于机器视觉的稻株识别与定位方法.pdf

志玉****爱啊


1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器视觉的稻株识别与定位方法.pdf
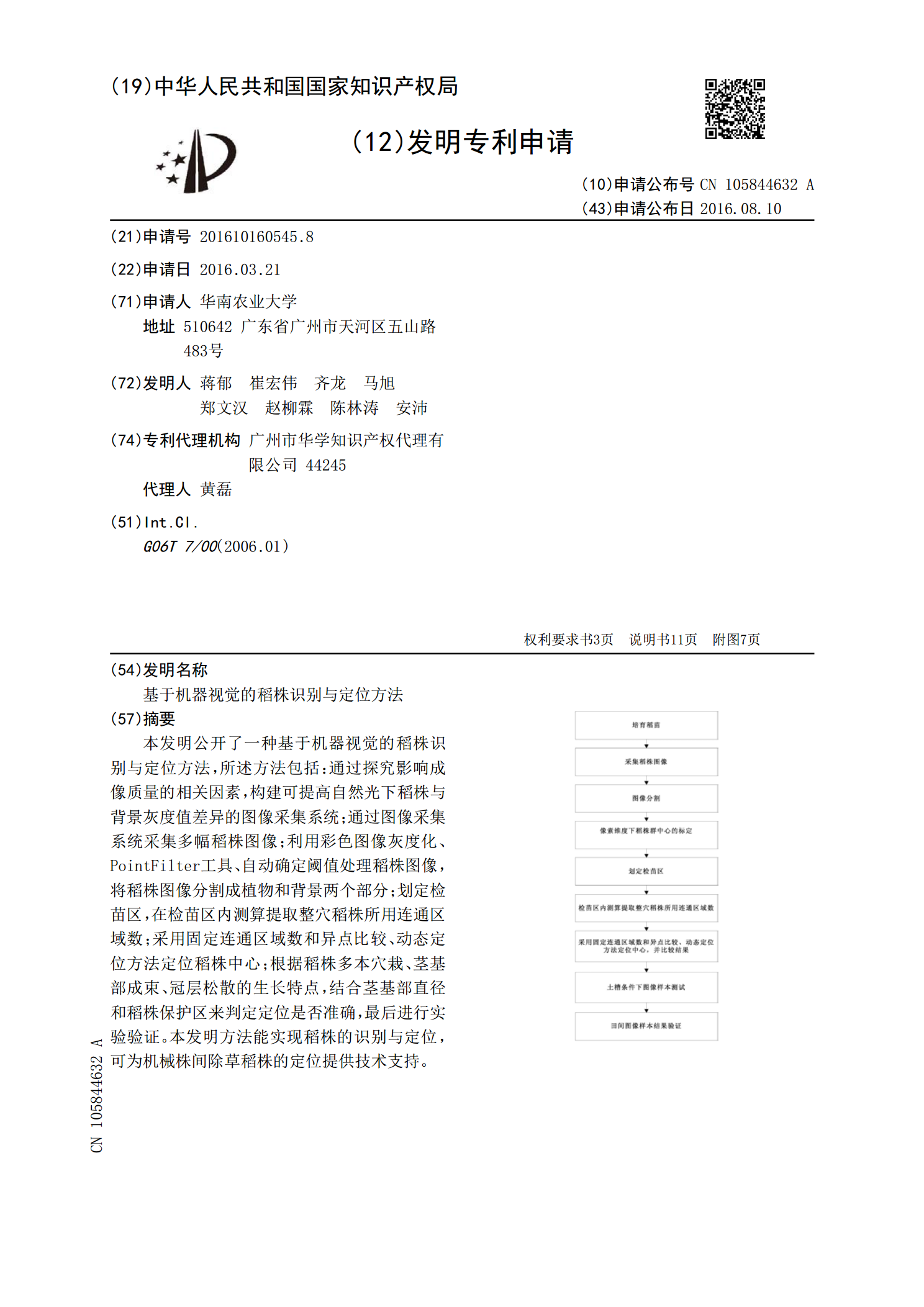
本发明公开了一种基于机器视觉的稻株识别与定位方法,所述方法包括:通过探究影响成像质量的相关因素,构建可提高自然光下稻株与背景灰度值差异的图像采集系统;通过图像采集系统采集多幅稻株图像;利用彩色图像灰度化、PointFilter工具、自动确定阈值处理稻株图像,将稻株图像分割成植物和背景两个部分;划定检苗区,在检苗区内测算提取整穴稻株所用连通区域数;采用固定连通区域数和异点比较、动态定位方法定位稻株中心;根据稻株多本穴栽、茎基部成束、冠层松散的生长特点,结合茎基部直径和稻株保护区来判定定位是否准确,最后进行实

基于机器视觉的甘蓝识别及定位研究.pptx
添加副标题目录PART01PART02研究背景研究意义研究目的和问题PART03机器视觉技术概述甘蓝识别技术研究现状甘蓝定位技术研究现状现有研究的不足之处PART04研究方法技术路线数据采集和处理实验设计和实施PART05甘蓝识别结果和分析甘蓝定位结果和分析结果比较和讨论误差分析和改进措施PART06研究结论研究成果和创新点研究局限和不足之处未来研究展望和方向感谢您的观看

基于机器视觉的工件识别与定位算法.docx
基于机器视觉的工件识别与定位算法标题:基于机器视觉的工件识别与定位算法摘要:随着工业自动化的发展,工件识别与定位在工业生产中扮演了重要角色。本文基于机器视觉技术,对工件识别与定位算法进行探讨。首先,介绍了机器视觉的基本原理和常用技术。然后,从图像预处理、特征提取和分类识别三个方面,详细分析了工件识别的方法和算法。接着,介绍了工件定位的基本原理和方法,并结合实际案例,分析了不同算法的优缺点。最后,讨论了目前存在的问题和未来的发展方向。关键词:机器视觉、工件识别、工件定位、图像预处理、特征提取、分类识别1.引

基于机器视觉的工件的识别和定位.docx
基于机器视觉的工件的识别和定位摘要本文首先介绍了机器视觉技术的基础概念和几个重要的应用之一:工件识别和定位。我们针对这一应用,探讨了常见的方法和技术,如颜色分割、边缘检测、特征提取等等,并比较了它们的优劣。我们认为,基于深度学习的方法是当前最先进的方法。接着,我们介绍了基于深度学习的工件识别和定位方法,主要包括卷积神经网络、区域提议网络、密集预测等等。我们详细探讨了这些方法的原理和流程,并举例说明了它们的效果。最后,我们总结了目前存在的问题和挑战,并对未来的发展方向进行了展望。关键词:机器视觉;工件识别;

基于机器视觉的菠萝果实识别与定位.docx
基于机器视觉的菠萝果实识别与定位AbstractTherecognitionandlocalizationofpineapplefruitbasedonmachinevisionisofgreatsignificancetothedevelopmentofthefruitindustry.Inthispaper,apipelineforrecognizingandlocatingpineapplefruitusingtheYOLOv4objectdetectionalgorithmisproposed.T