
一种调距桨桨叶表面打磨装置和打磨方法.pdf

猫巷****傲柏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种调距桨桨叶表面打磨装置和打磨方法.pdf
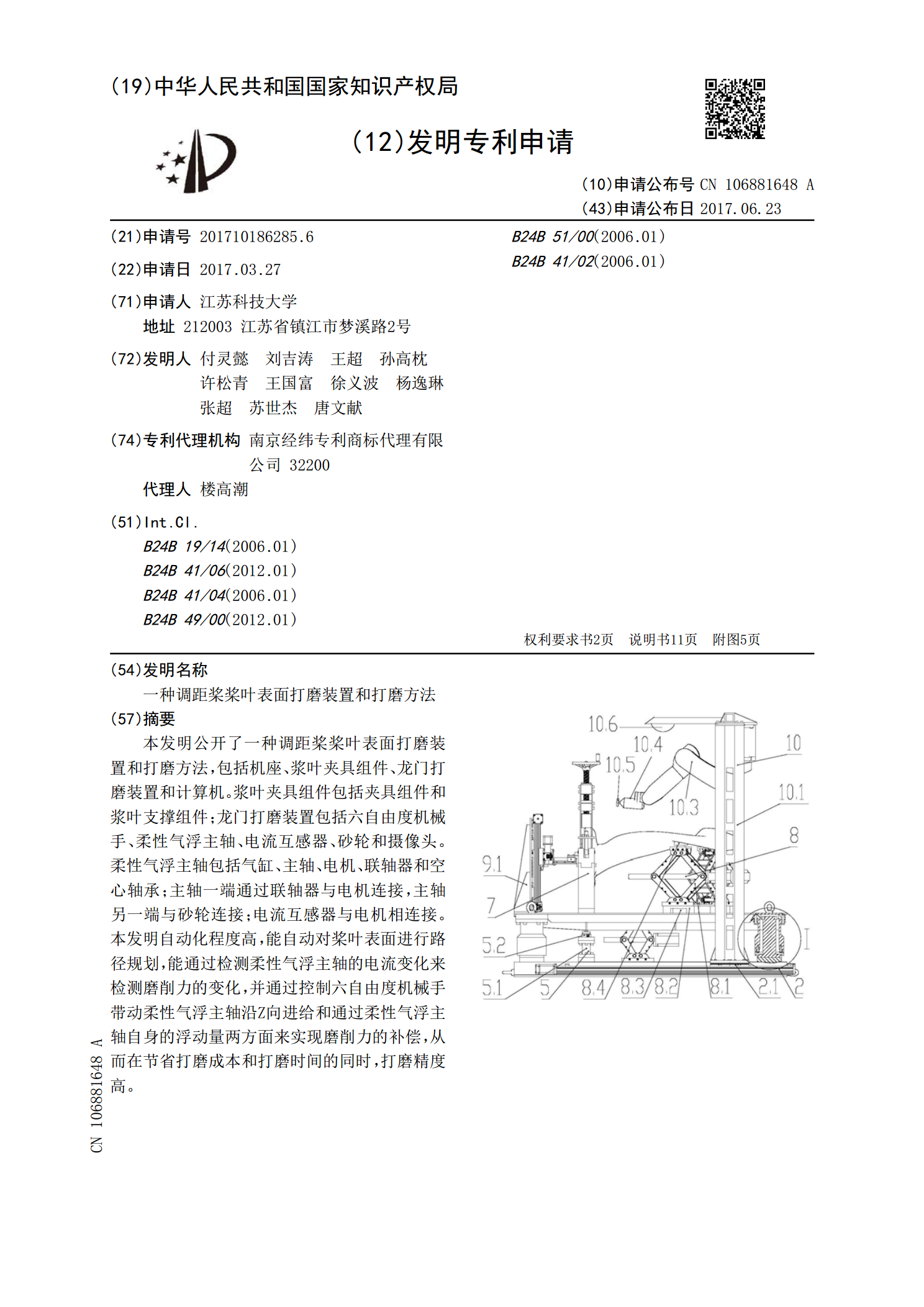
本发明公开了一种调距桨桨叶表面打磨装置和打磨方法,包括机座、浆叶夹具组件、龙门打磨装置和计算机。浆叶夹具组件包括夹具组件和浆叶支撑组件;龙门打磨装置包括六自由度机械手、柔性气浮主轴、电流互感器、砂轮和摄像头。柔性气浮主轴包括气缸、主轴、电机、联轴器和空心轴承;主轴一端通过联轴器与电机连接,主轴另一端与砂轮连接;电流互感器与电机相连接。本发明自动化程度高,能自动对桨叶表面进行路径规划,能通过检测柔性气浮主轴的电流变化来检测磨削力的变化,并通过控制六自由度机械手带动柔性气浮主轴沿Z向进给和通过柔性气浮主轴自身
桨叶表面打磨方法.pdf
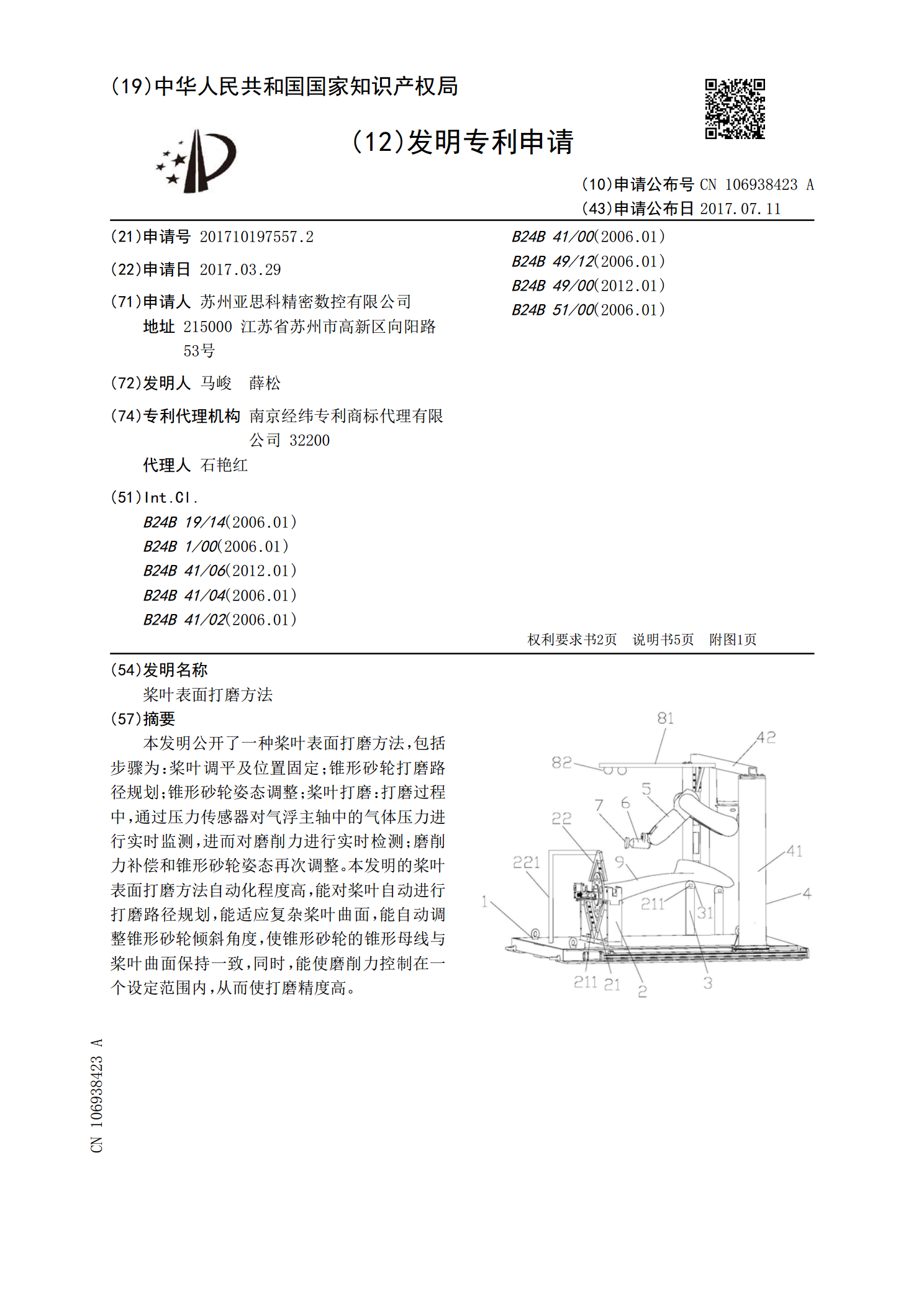
本发明公开了一种桨叶表面打磨方法,包括步骤为:桨叶调平及位置固定;锥形砂轮打磨路径规划;锥形砂轮姿态调整;桨叶打磨:打磨过程中,通过压力传感器对气浮主轴中的气体压力进行实时监测,进而对磨削力进行实时检测;磨削力补偿和锥形砂轮姿态再次调整。本发明的桨叶表面打磨方法自动化程度高,能对桨叶自动进行打磨路径规划,能适应复杂桨叶曲面,能自动调整锥形砂轮倾斜角度,使锥形砂轮的锥形母线与桨叶曲面保持一致,同时,能使磨削力控制在一个设定范围内,从而使打磨精度高。
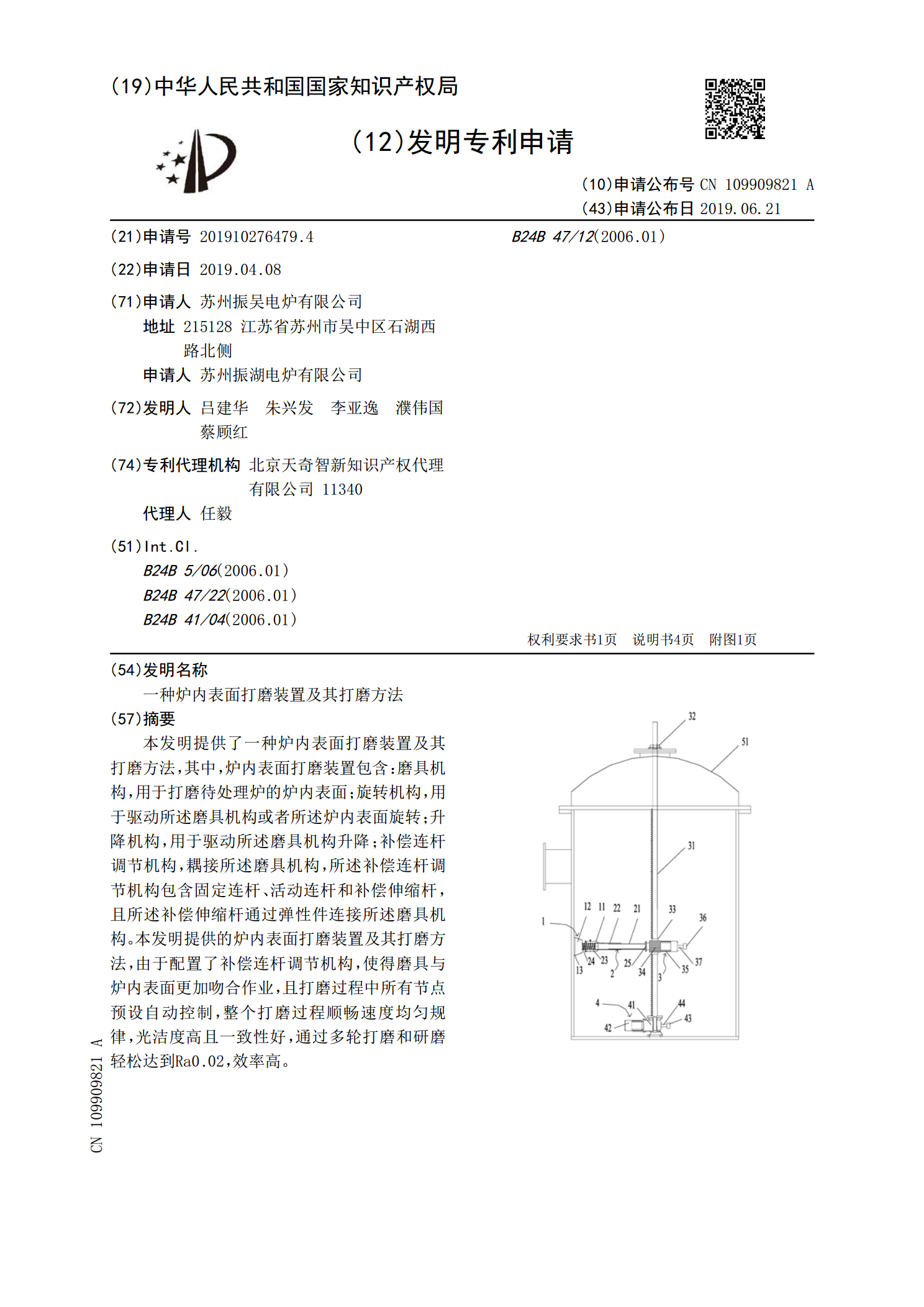
一种炉内表面打磨装置及其打磨方法.pdf
本发明提供了一种炉内表面打磨装置及其打磨方法,其中,炉内表面打磨装置包含:磨具机构,用于打磨待处理炉的炉内表面;旋转机构,用于驱动所述磨具机构或者所述炉内表面旋转;升降机构,用于驱动所述磨具机构升降;补偿连杆调节机构,耦接所述磨具机构,所述补偿连杆调节机构包含固定连杆、活动连杆和补偿伸缩杆,且所述补偿伸缩杆通过弹性件连接所述磨具机构。本发明提供的炉内表面打磨装置及其打磨方法,由于配置了补偿连杆调节机构,使得磨具与炉内表面更加吻合作业,且打磨过程中所有节点预设自动控制,整个打磨过程顺畅速度均匀规律,光洁度高
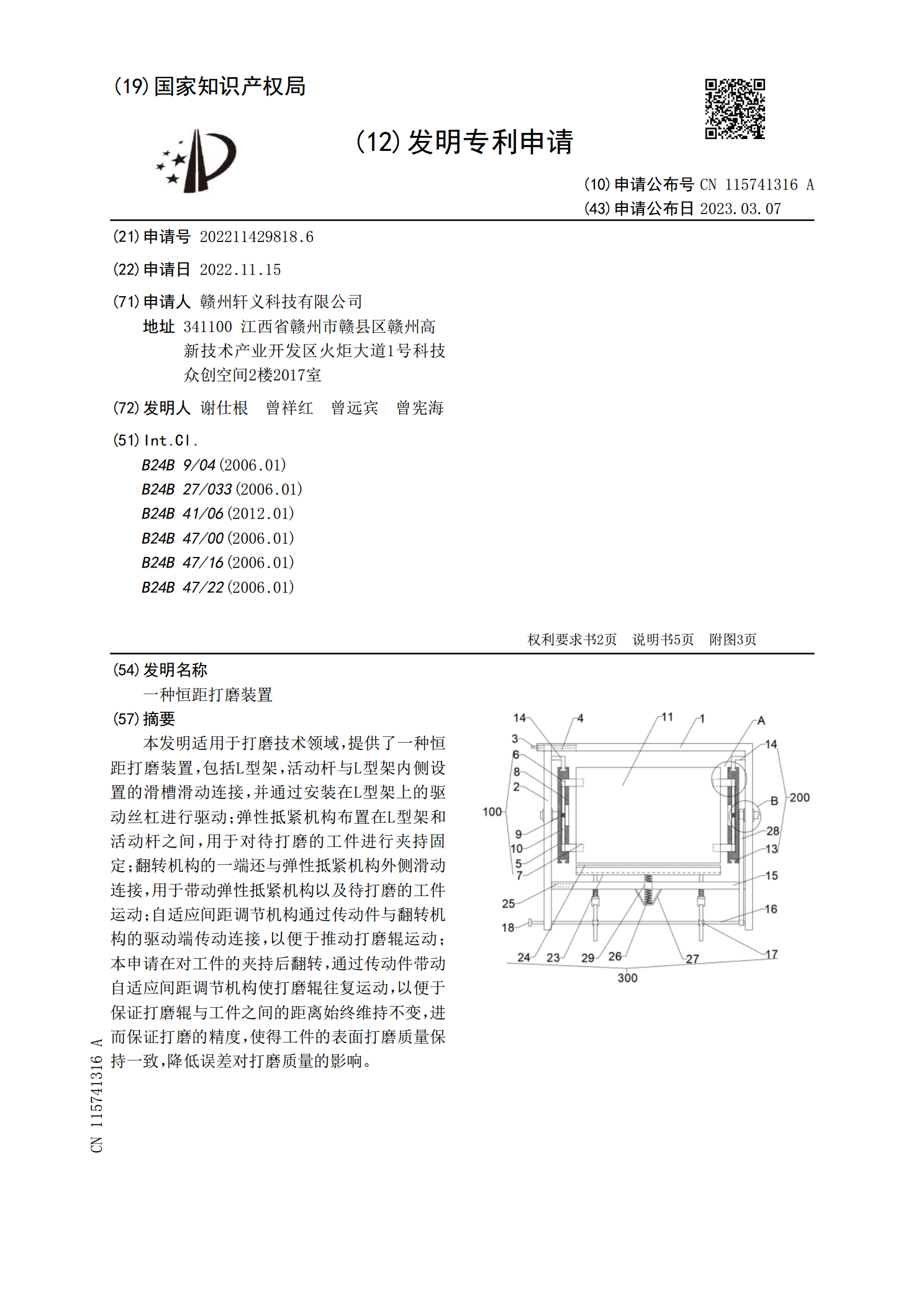
一种恒距打磨装置.pdf
本发明适用于打磨技术领域,提供了一种恒距打磨装置,包括L型架,活动杆与L型架内侧设置的滑槽滑动连接,并通过安装在L型架上的驱动丝杠进行驱动;弹性抵紧机构布置在L型架和活动杆之间,用于对待打磨的工件进行夹持固定;翻转机构的一端还与弹性抵紧机构外侧滑动连接,用于带动弹性抵紧机构以及待打磨的工件运动;自适应间距调节机构通过传动件与翻转机构的驱动端传动连接,以便于推动打磨辊运动;本申请在对工件的夹持后翻转,通过传动件带动自适应间距调节机构使打磨辊往复运动,以便于保证打磨辊与工件之间的距离始终维持不变,进而保证打磨
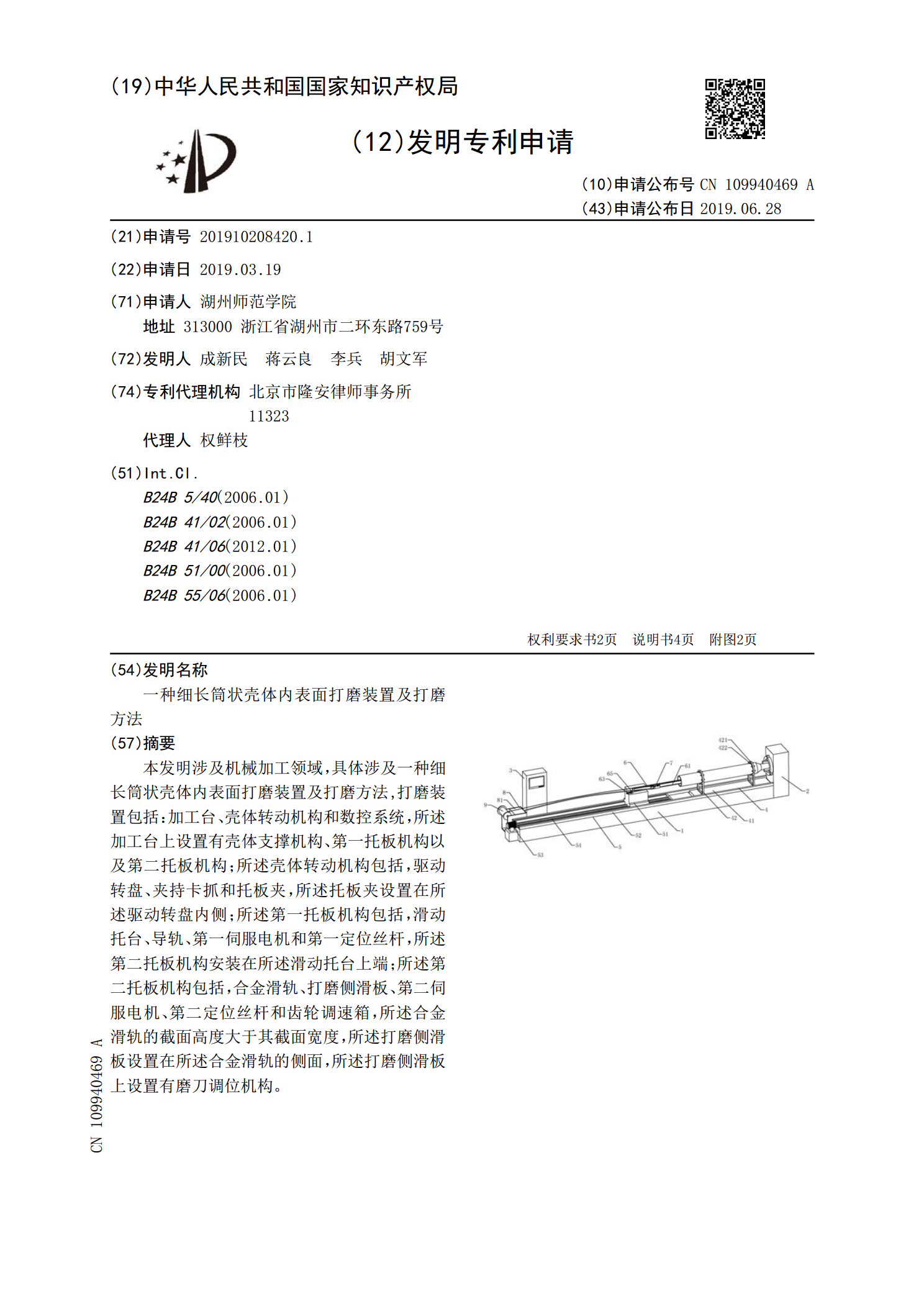
一种细长筒状壳体内表面打磨装置及打磨方法.pdf
本发明涉及机械加工领域,具体涉及一种细长筒状壳体内表面打磨装置及打磨方法,打磨装置包括:加工台、壳体转动机构和数控系统,所述加工台上设置有壳体支撑机构、第一托板机构以及第二托板机构;所述壳体转动机构包括,驱动转盘、夹持卡抓和托板夹,所述托板夹设置在所述驱动转盘内侧;所述第一托板机构包括,滑动托台、导轨、第一伺服电机和第一定位丝杆,所述第二托板机构安装在所述滑动托台上端;所述第二托板机构包括,合金滑轨、打磨侧滑板、第二伺服电机、第二定位丝杆和齿轮调速箱,所述合金滑轨的截面高度大于其截面宽度,所述打磨侧滑板设