
一种飞机起降装置及方式.pdf

玉怡****文档

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种飞机起降装置及方式.pdf
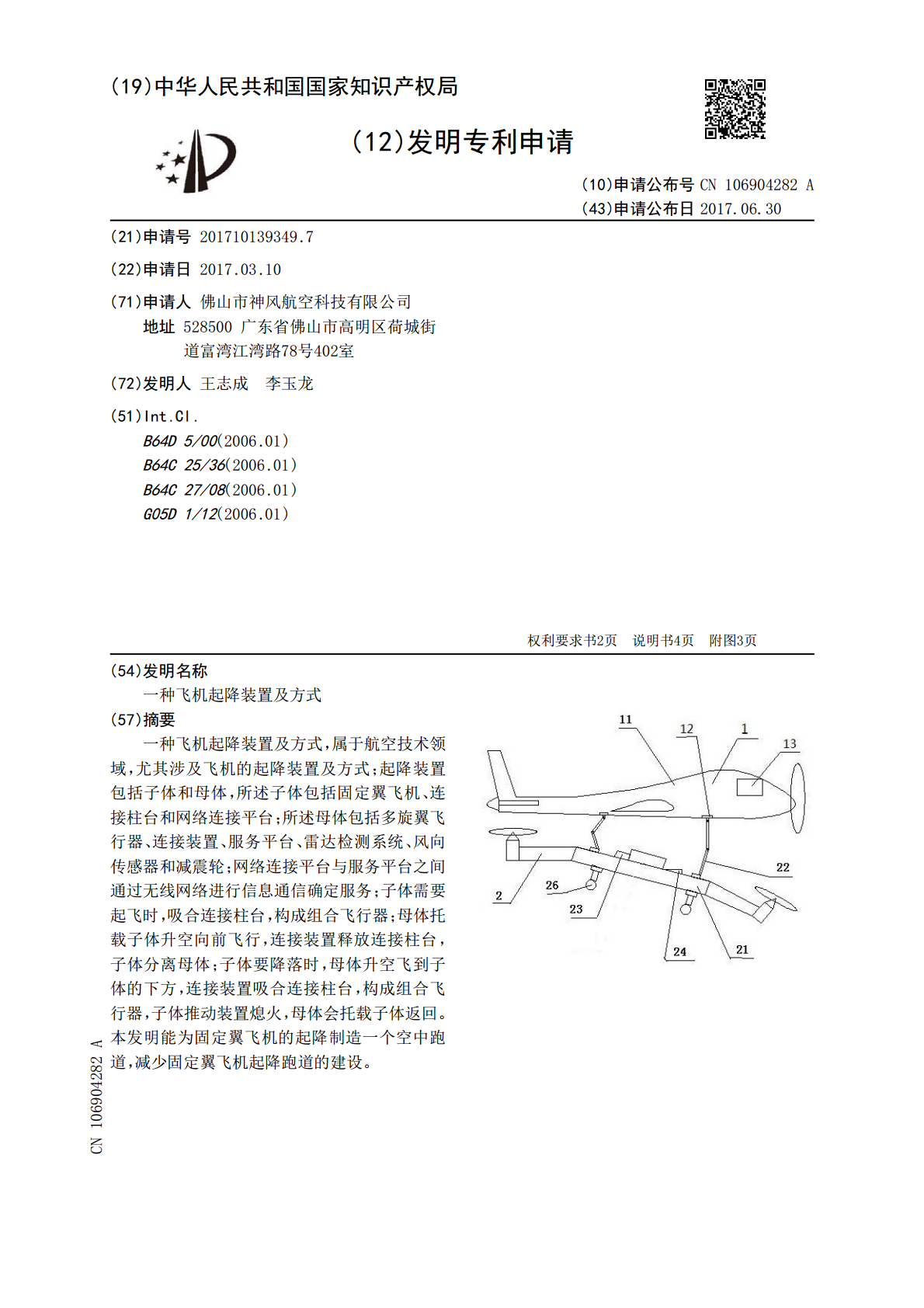
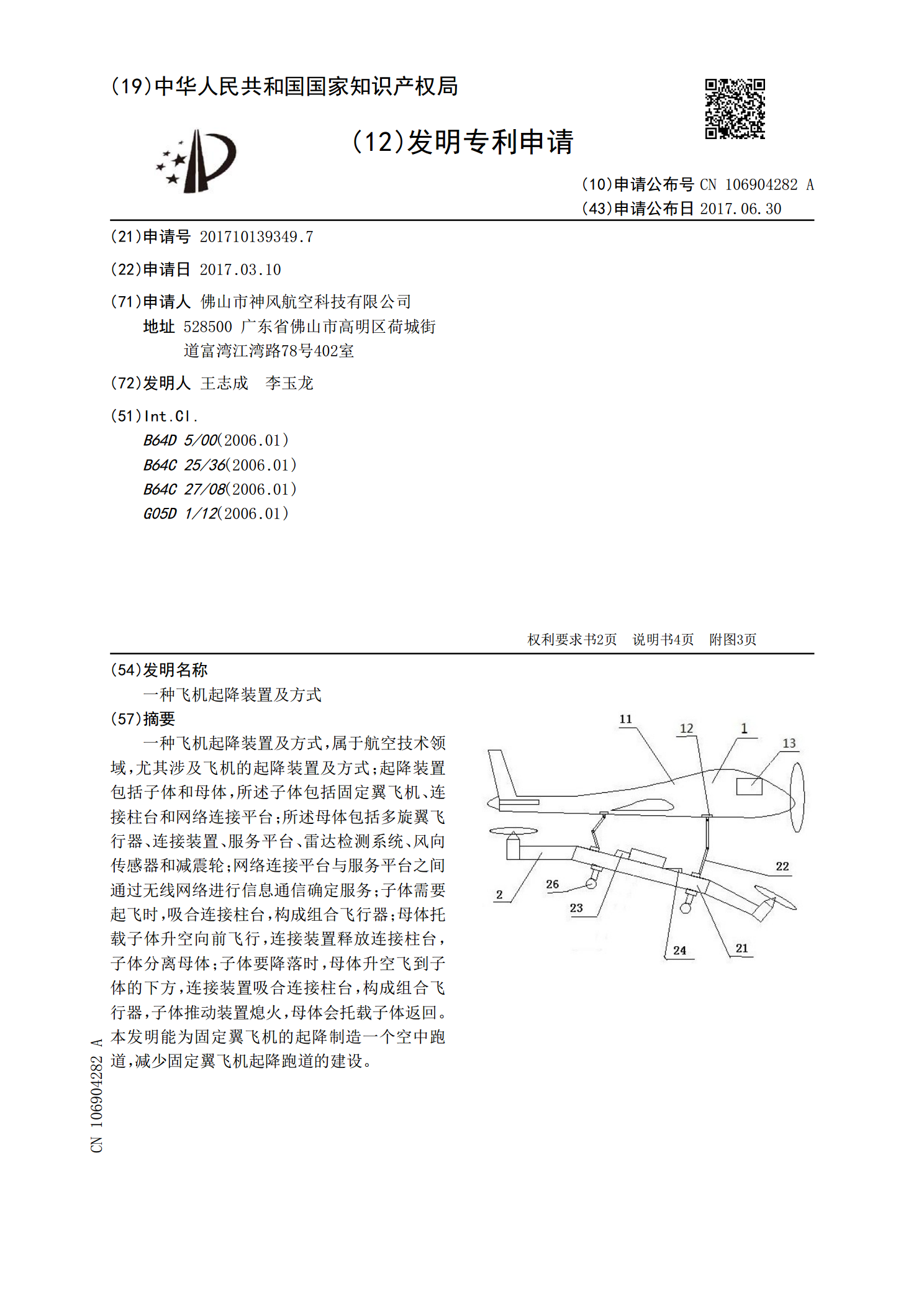
一种飞机起降装置及方式,属于航空技术领域,尤其涉及飞机的起降装置及方式;起降装置包括子体和母体,所述子体包括固定翼飞机、连接柱台和网络连接平台;所述母体包括多旋翼飞行器、连接装置、服务平台、雷达检测系统、风向传感器和减震轮;网络连接平台与服务平台之间通过无线网络进行信息通信确定服务;子体需要起飞时,吸合连接柱台,构成组合飞行器;母体托载子体升空向前飞行,连接装置释放连接柱台,子体分离母体;子体要降落时,母体升空飞到子体的下方,连接装置吸合连接柱台,构成组合飞行器,子体推动装置熄火,母体会托载子体返回。本发
一种飞机的水面起降装置.pdf
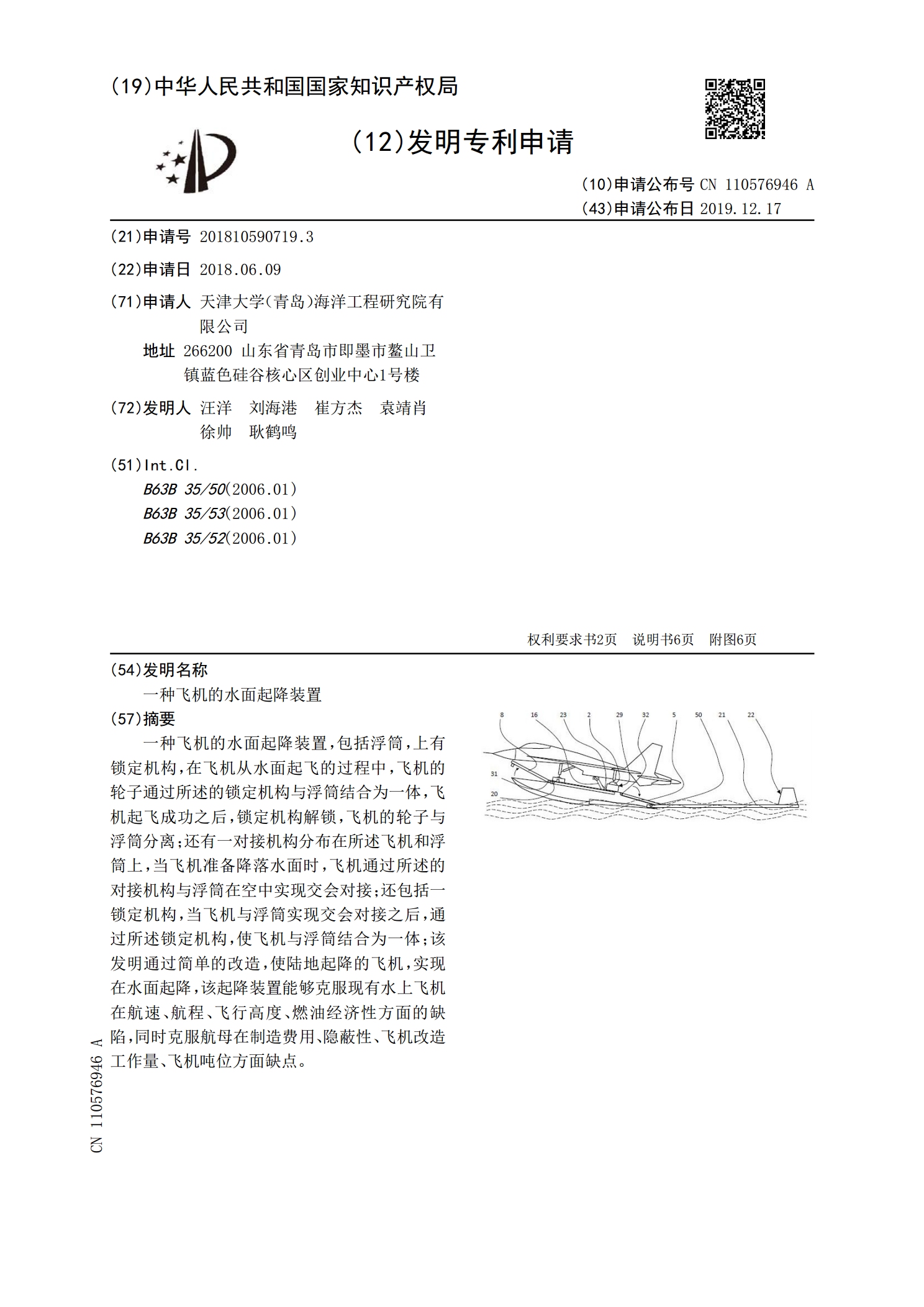
一种飞机的水面起降装置,包括浮筒,上有锁定机构,在飞机从水面起飞的过程中,飞机的轮子通过所述的锁定机构与浮筒结合为一体,飞机起飞成功之后,锁定机构解锁,飞机的轮子与浮筒分离;还有一对接机构分布在所述飞机和浮筒上,当飞机准备降落水面时,飞机通过所述的对接机构与浮筒在空中实现交会对接;还包括一锁定机构,当飞机与浮筒实现交会对接之后,通过所述锁定机构,使飞机与浮筒结合为一体;该发明通过简单的改造,使陆地起降的飞机,实现在水面起降,该起降装置能够克服现有水上飞机在航速、航程、飞行高度、燃油经济性方面的缺陷,同时克
一种飞机的水上起降装置.pdf
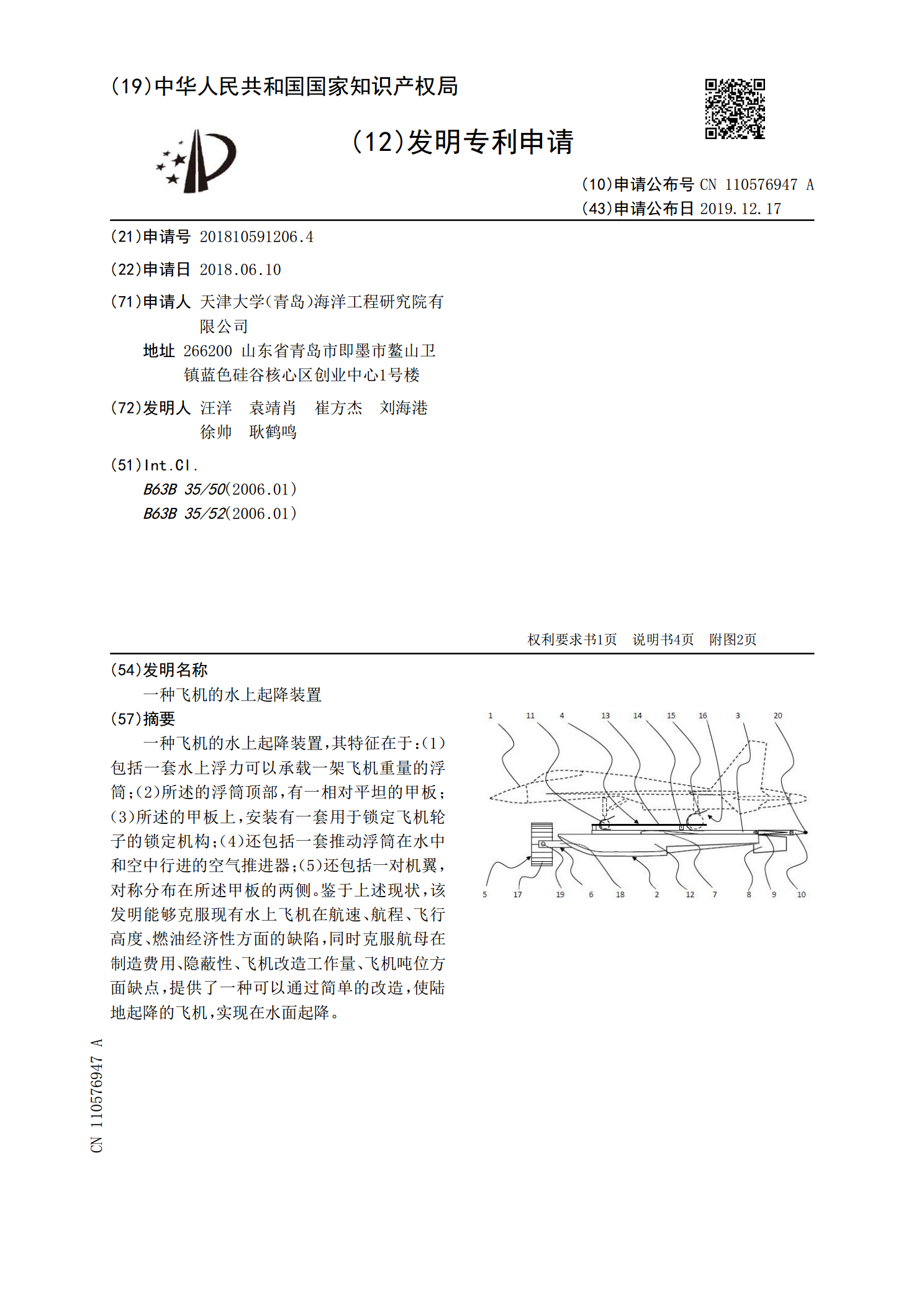
一种飞机的水上起降装置,其特征在于:(1)包括一套水上浮力可以承载一架飞机重量的浮筒;(2)所述的浮筒顶部,有一相对平坦的甲板;(3)所述的甲板上,安装有一套用于锁定飞机轮子的锁定机构;(4)还包括一套推动浮筒在水中和空中行进的空气推进器;(5)还包括一对机翼,对称分布在所述甲板的两侧。鉴于上述现状,该发明能够克服现有水上飞机在航速、航程、飞行高度、燃油经济性方面的缺陷,同时克服航母在制造费用、隐蔽性、飞机改造工作量、飞机吨位方面缺点,提供了一种可以通过简单的改造,使陆地起降的飞机,实现在水面起降。
一种服务于飞机新的起降方式的航母.pdf
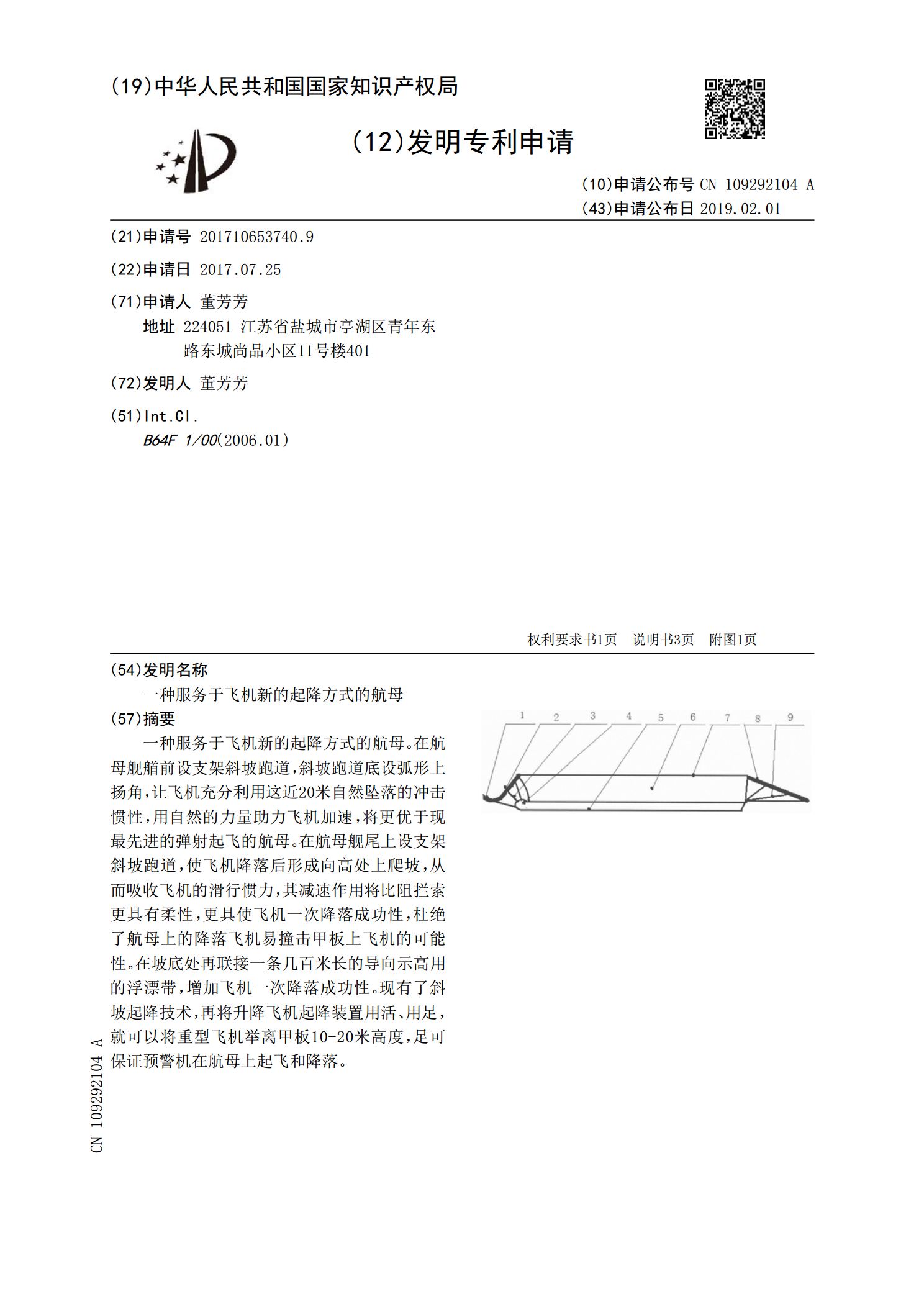
一种服务于飞机新的起降方式的航母。在航母舰艏前设支架斜坡跑道,斜坡跑道底设弧形上扬角,让飞机充分利用这近20米自然坠落的冲击惯性,用自然的力量助力飞机加速,将更优于现最先进的弹射起飞的航母。在航母舰尾上设支架斜坡跑道,使飞机降落后形成向高处上爬坡,从而吸收飞机的滑行惯力,其减速作用将比阻拦索更具有柔性,更具使飞机一次降落成功性,杜绝了航母上的降落飞机易撞击甲板上飞机的可能性。在坡底处再联接一条几百米长的导向示高用的浮漂带,增加飞机一次降落成功性。现有了斜坡起降技术,再将升降飞机起降装置用活、用足,就可以将
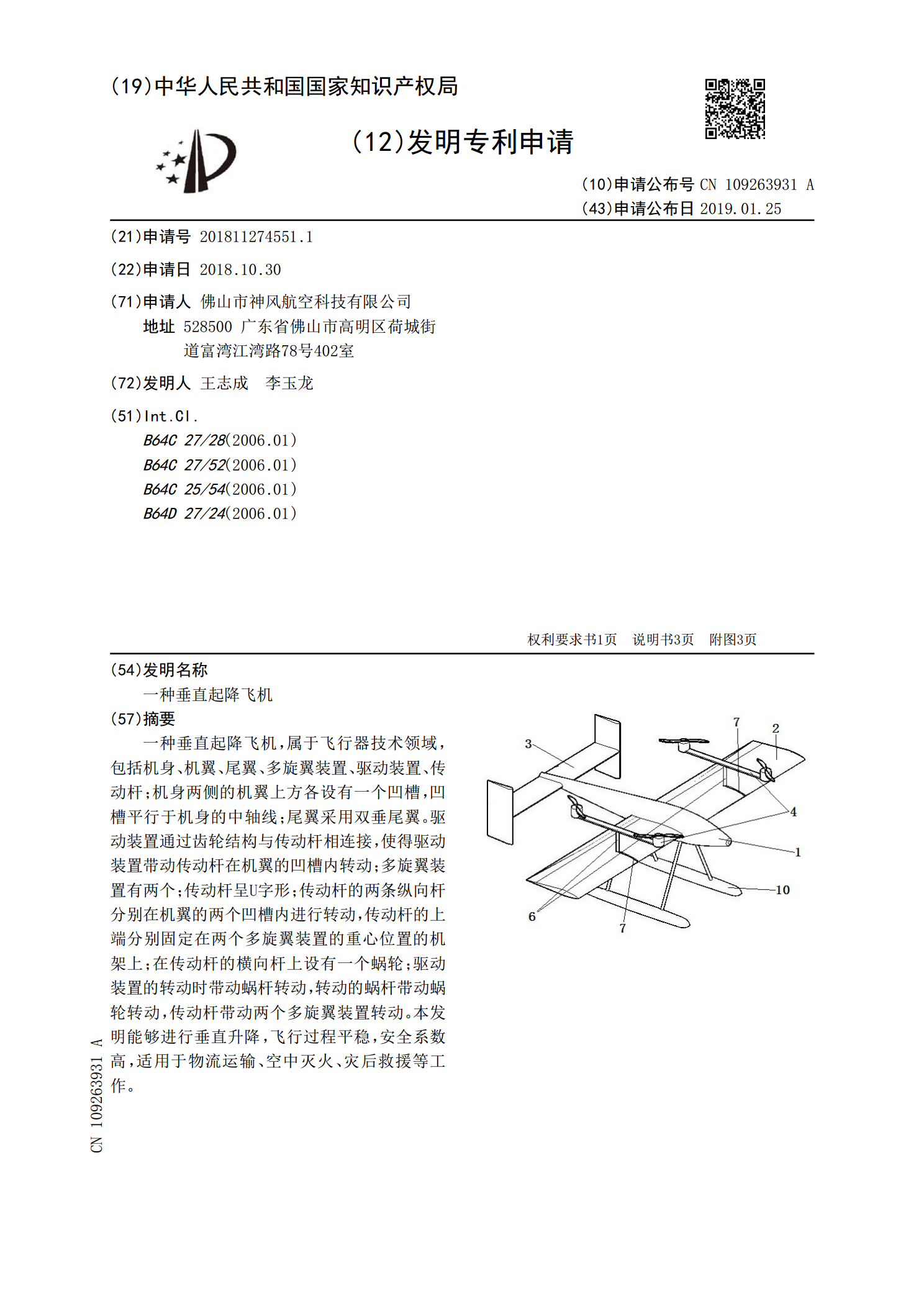
一种垂直起降飞机.pdf
一种垂直起降飞机,属于飞行器技术领域,包括机身、机翼、尾翼、多旋翼装置、驱动装置、传动杆;机身两侧的机翼上方各设有一个凹槽,凹槽平行于机身的中轴线;尾翼采用双垂尾翼。驱动装置通过齿轮结构与传动杆相连接,使得驱动装置带动传动杆在机翼的凹槽内转动;多旋翼装置有两个;传动杆呈U字形;传动杆的两条纵向杆分别在机翼的两个凹槽内进行转动,传动杆的上端分别固定在两个多旋翼装置的重心位置的机架上;在传动杆的横向杆上设有一个蜗轮;驱动装置的转动时带动蜗杆转动,转动的蜗杆带动蜗轮转动,传动杆带动两个多旋翼装置转动。本发明能够