
一种越障移动机器人.pdf

一条****彩妍


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种越障移动机器人.pdf
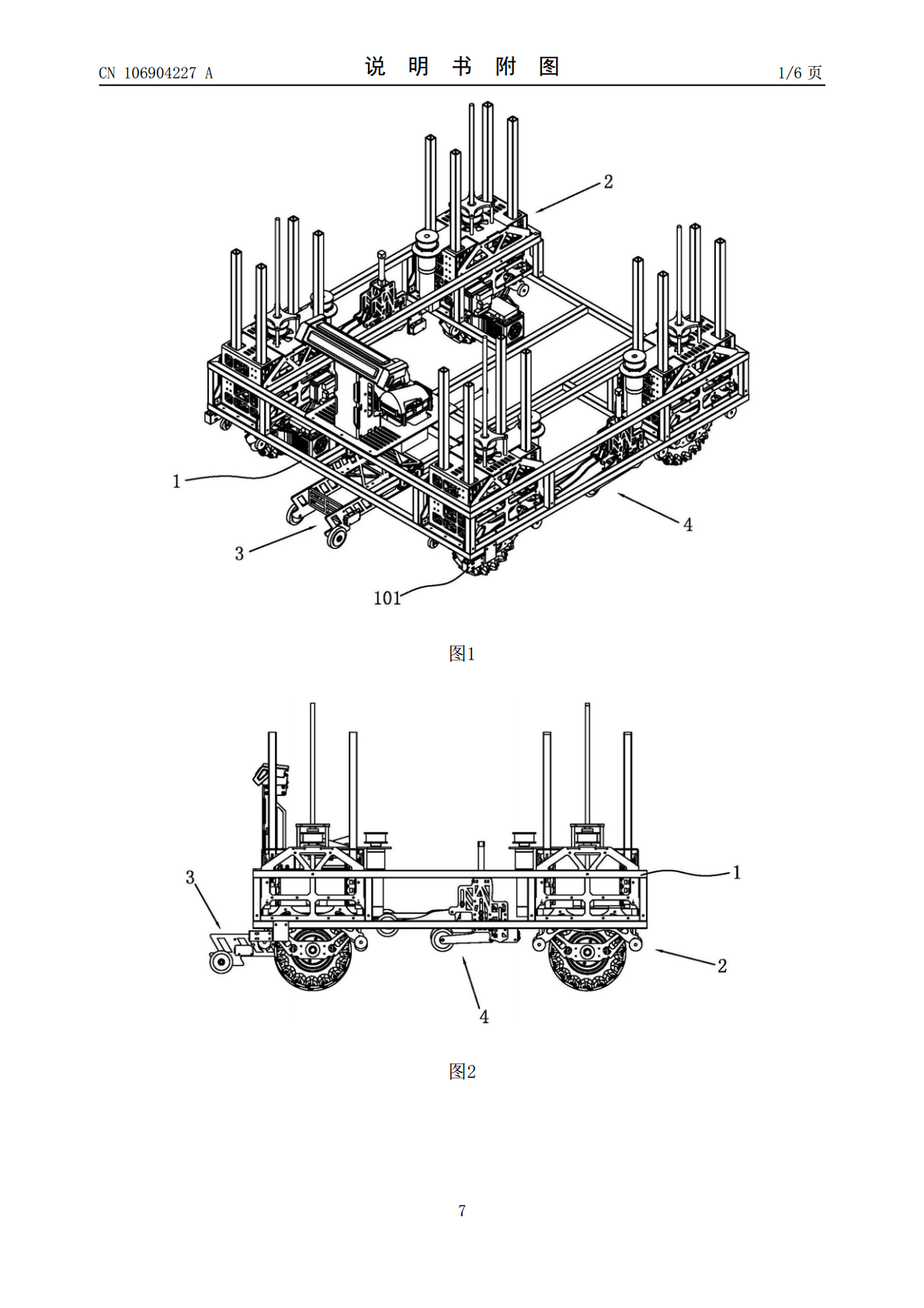
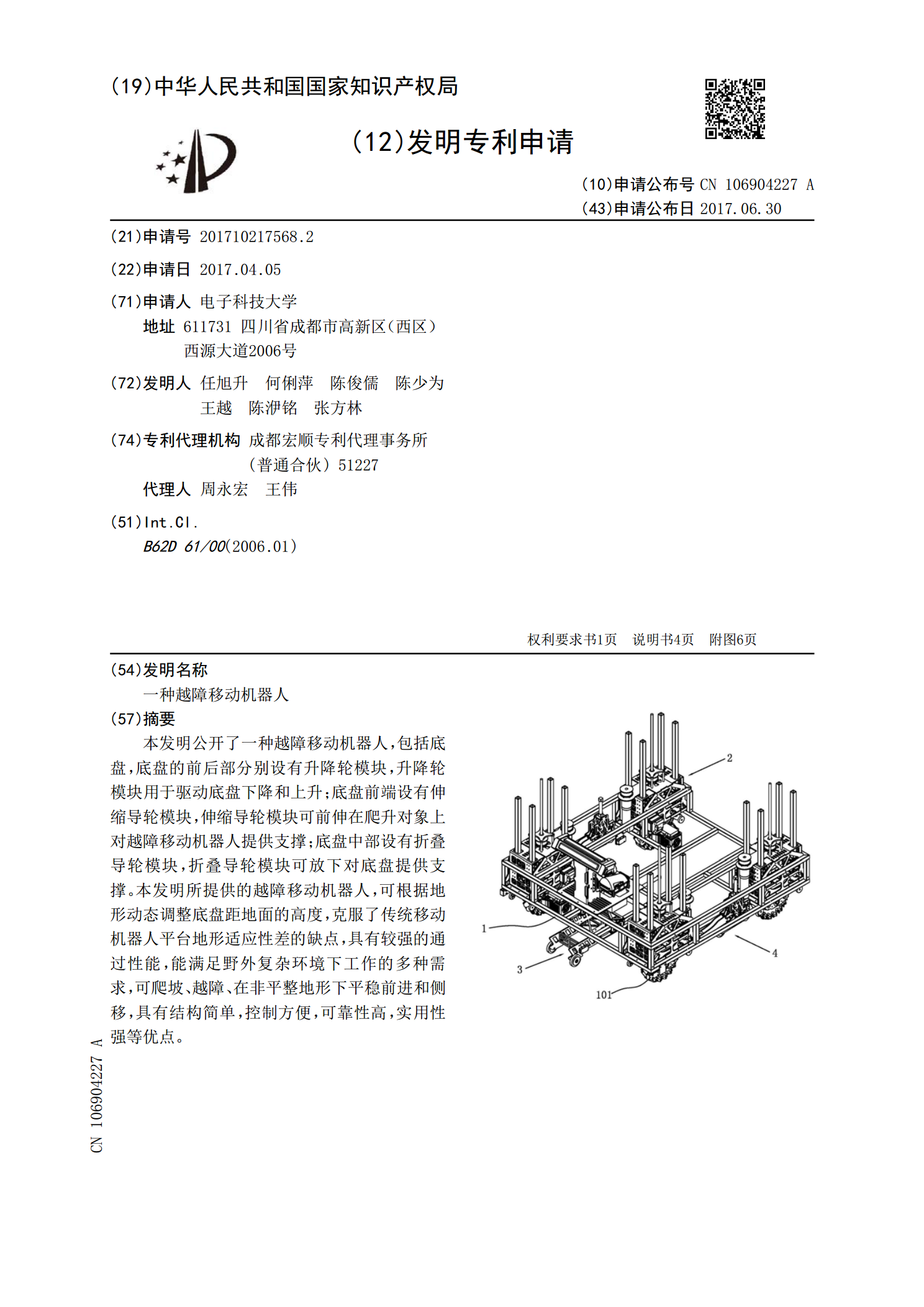
本发明公开了一种越障移动机器人,包括底盘,底盘的前后部分别设有升降轮模块,升降轮模块用于驱动底盘下降和上升;底盘前端设有伸缩导轮模块,伸缩导轮模块可前伸在爬升对象上对越障移动机器人提供支撑;底盘中部设有折叠导轮模块,折叠导轮模块可放下对底盘提供支撑。本发明所提供的越障移动机器人,可根据地形动态调整底盘距地面的高度,克服了传统移动机器人平台地形适应性差的缺点,具有较强的通过性能,能满足野外复杂环境下工作的多种需求,可爬坡、越障、在非平整地形下平稳前进和侧移,具有结构简单,控制方便,可靠性高,实用性强等优点。

一种井下越障移动机器人.pdf
本发明公开了一种井下越障移动机器人,包括机架、底盘、绕柱抱紧模块、摩擦轮模块和距离传感器;底盘安装在机架的下端,摩擦轮模块设在底盘上端的机架上,绕柱抱紧模块设在机架的后端,距离传感器安装在机架的前后两端;绕柱抱紧模块用于驱动底盘下降和上升,并利用套环抱紧立柱再通过驱动摩擦轮正反转来实现机器人的旋转。本发明可根据地形动态调整底盘距地面的高度,克服了传统移动机器人平台地形适应性差的缺点,具有较强的通过性能,能满足井下复杂环境工作的多种需求,可爬坡、越障、在非平整地形下平稳前进和侧移,具有结构简单,控制方便,可
越障轮及移动机器人.pdf
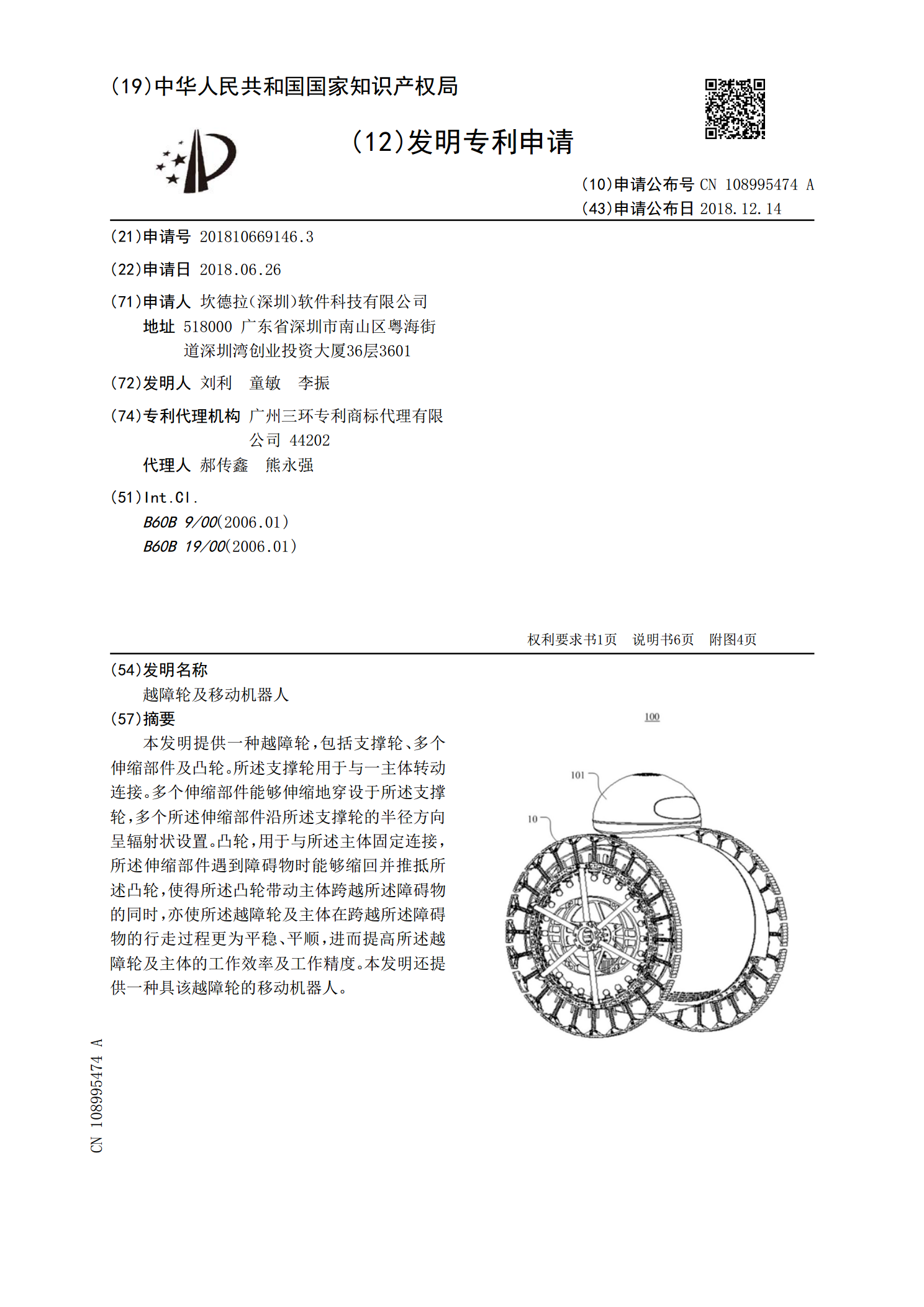
本发明提供一种越障轮,包括支撑轮、多个伸缩部件及凸轮。所述支撑轮用于与一主体转动连接。多个伸缩部件能够伸缩地穿设于所述支撑轮,多个所述伸缩部件沿所述支撑轮的半径方向呈辐射状设置。凸轮,用于与所述主体固定连接,所述伸缩部件遇到障碍物时能够缩回并推抵所述凸轮,使得所述凸轮带动主体跨越所述障碍物的同时,亦使所述越障轮及主体在跨越所述障碍物的行走过程更为平稳、平顺,进而提高所述越障轮及主体的工作效率及工作精度。本发明还提供一种具该越障轮的移动机器人。

一种用于移动机器人的变位越障轮腿.pdf
本发明公开了一种用于移动机器人的变位越障轮腿,轮腿包括驱动装置、驱动装置壳体、支撑腿、移动轮。驱动装置包括驱动电动机、减速器、外螺纹丝杠、内螺纹丝杠从动件,支撑腿包括长支撑腿、短支撑腿,驱动电动机与减速器安装在驱动装置壳体的一端,长支撑腿一端铰接在内螺纹丝杠从动件上,底端安装有移动轮,内螺纹丝杠从动件啮合外螺纹丝杠,驱动电机旋转带动内螺纹丝杠从动件在外螺纹丝杠上沿着驱动装置壳体长度方向向外或向内移动,内螺纹丝杠从动件带动支撑腿移动来调整移动轮的垂直位置,本发明的创新点在于轮腿通过自身的变位变形即可调节移动
一种新型轮腿复合式变位越障移动机器人.pdf
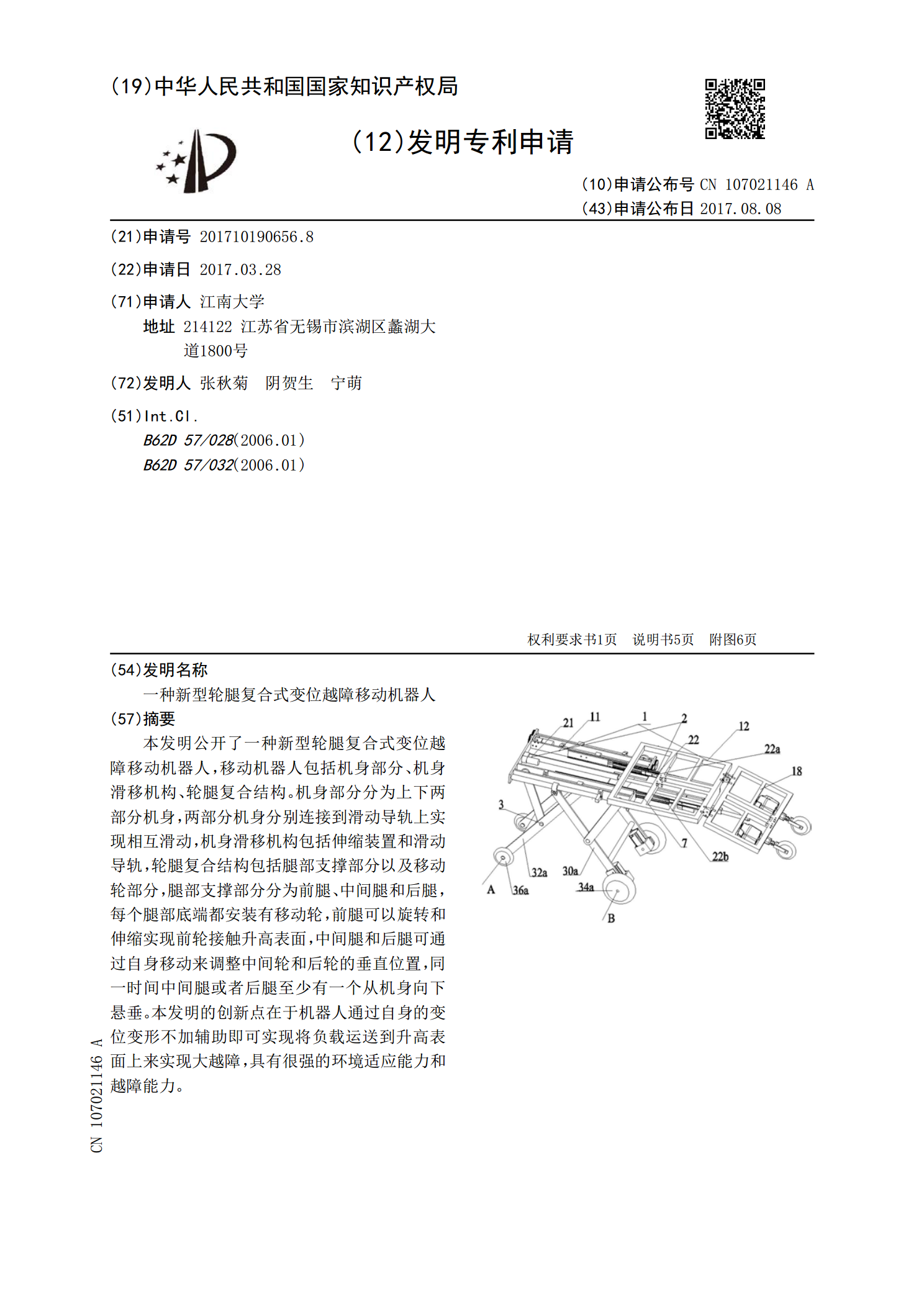
本发明公开了一种新型轮腿复合式变位越障移动机器人,移动机器人包括机身部分、机身滑移机构、轮腿复合结构。机身部分分为上下两部分机身,两部分机身分别连接到滑动导轨上实现相互滑动,机身滑移机构包括伸缩装置和滑动导轨,轮腿复合结构包括腿部支撑部分以及移动轮部分,腿部支撑部分分为前腿、中间腿和后腿,每个腿部底端都安装有移动轮,前腿可以旋转和伸缩实现前轮接触升高表面,中间腿和后腿可通过自身移动来调整中间轮和后轮的垂直位置,同一时间中间腿或者后腿至少有一个从机身向下悬垂。本发明的创新点在于机器人通过自身的变位变形不加辅