
一种用于移动机器人的变位越障轮腿.pdf

是你****韵呀


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于移动机器人的变位越障轮腿.pdf
本发明公开了一种用于移动机器人的变位越障轮腿,轮腿包括驱动装置、驱动装置壳体、支撑腿、移动轮。驱动装置包括驱动电动机、减速器、外螺纹丝杠、内螺纹丝杠从动件,支撑腿包括长支撑腿、短支撑腿,驱动电动机与减速器安装在驱动装置壳体的一端,长支撑腿一端铰接在内螺纹丝杠从动件上,底端安装有移动轮,内螺纹丝杠从动件啮合外螺纹丝杠,驱动电机旋转带动内螺纹丝杠从动件在外螺纹丝杠上沿着驱动装置壳体长度方向向外或向内移动,内螺纹丝杠从动件带动支撑腿移动来调整移动轮的垂直位置,本发明的创新点在于轮腿通过自身的变位变形即可调节移动
一种新型轮腿复合式变位越障移动机器人.pdf
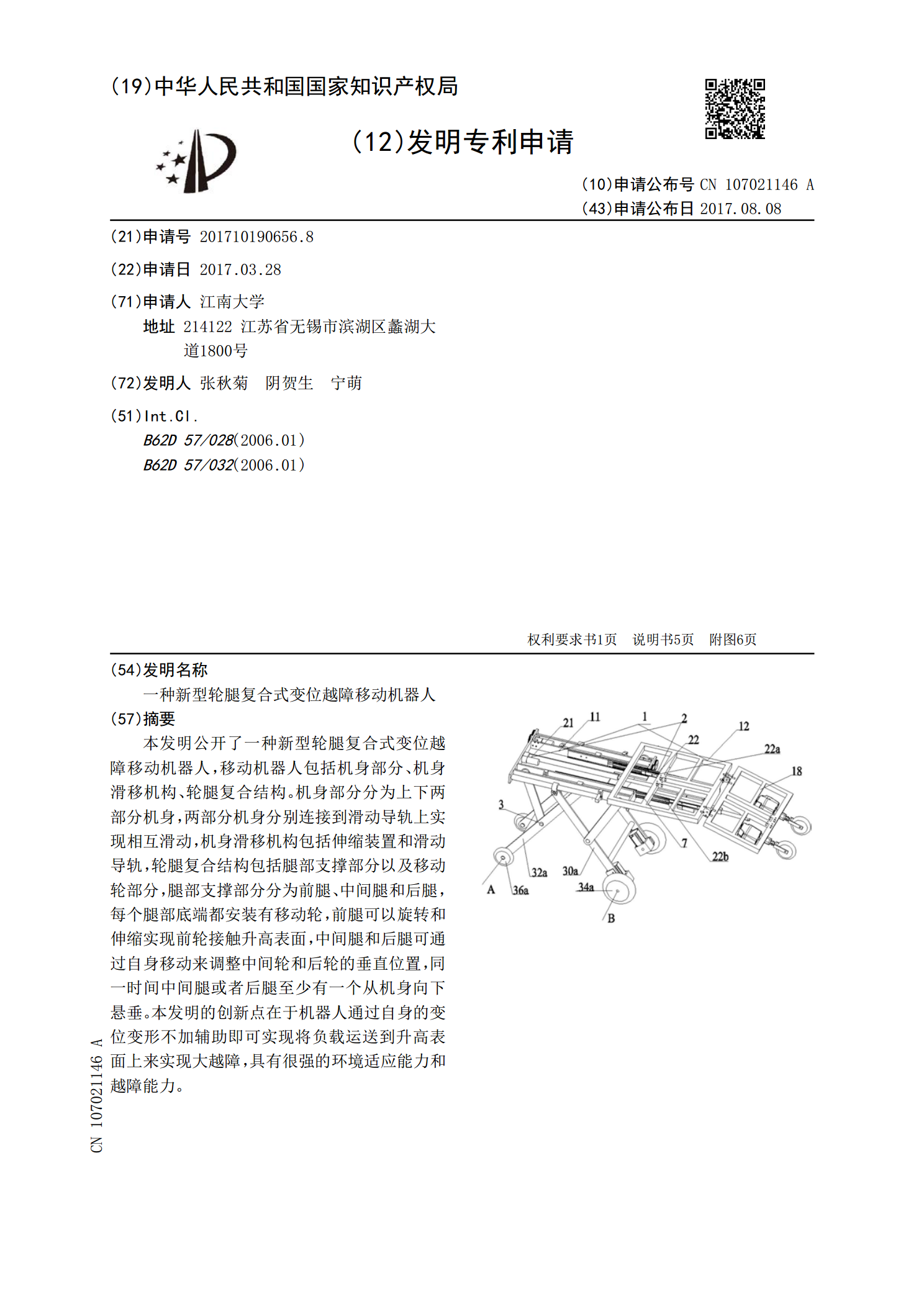
本发明公开了一种新型轮腿复合式变位越障移动机器人,移动机器人包括机身部分、机身滑移机构、轮腿复合结构。机身部分分为上下两部分机身,两部分机身分别连接到滑动导轨上实现相互滑动,机身滑移机构包括伸缩装置和滑动导轨,轮腿复合结构包括腿部支撑部分以及移动轮部分,腿部支撑部分分为前腿、中间腿和后腿,每个腿部底端都安装有移动轮,前腿可以旋转和伸缩实现前轮接触升高表面,中间腿和后腿可通过自身移动来调整中间轮和后轮的垂直位置,同一时间中间腿或者后腿至少有一个从机身向下悬垂。本发明的创新点在于机器人通过自身的变位变形不加辅

一种轮腿式越障车.pdf
本发明公开了一种轮腿式越障车,包括车体平台及与所述车体平台可转动连接的轮腿,所述车体平台的同一端的两侧设置有一对轮腿,所述轮腿的基部均固定连接有侧连杆,两个所述侧连杆的尾端通过下连杆活动连接,用于在其中一侧所述轮腿产生垂直运动时,另一侧所述轮腿相应联动。所述下连杆的中部与所述车体平台铰接连接;所述车体平台通过弹性缓震组件弹性连接有顶部连接结构、用于安置上部负载,所述顶平台与车底之间通过上齿轮和下齿轮啮合连接,用于补偿轮腿运动带来的位移。相邻的轮腿之间通过连杆实现联动,当某一轮腿出现越障动作时,相邻轮腿能够
一种轮腿式越障行走装置.pdf
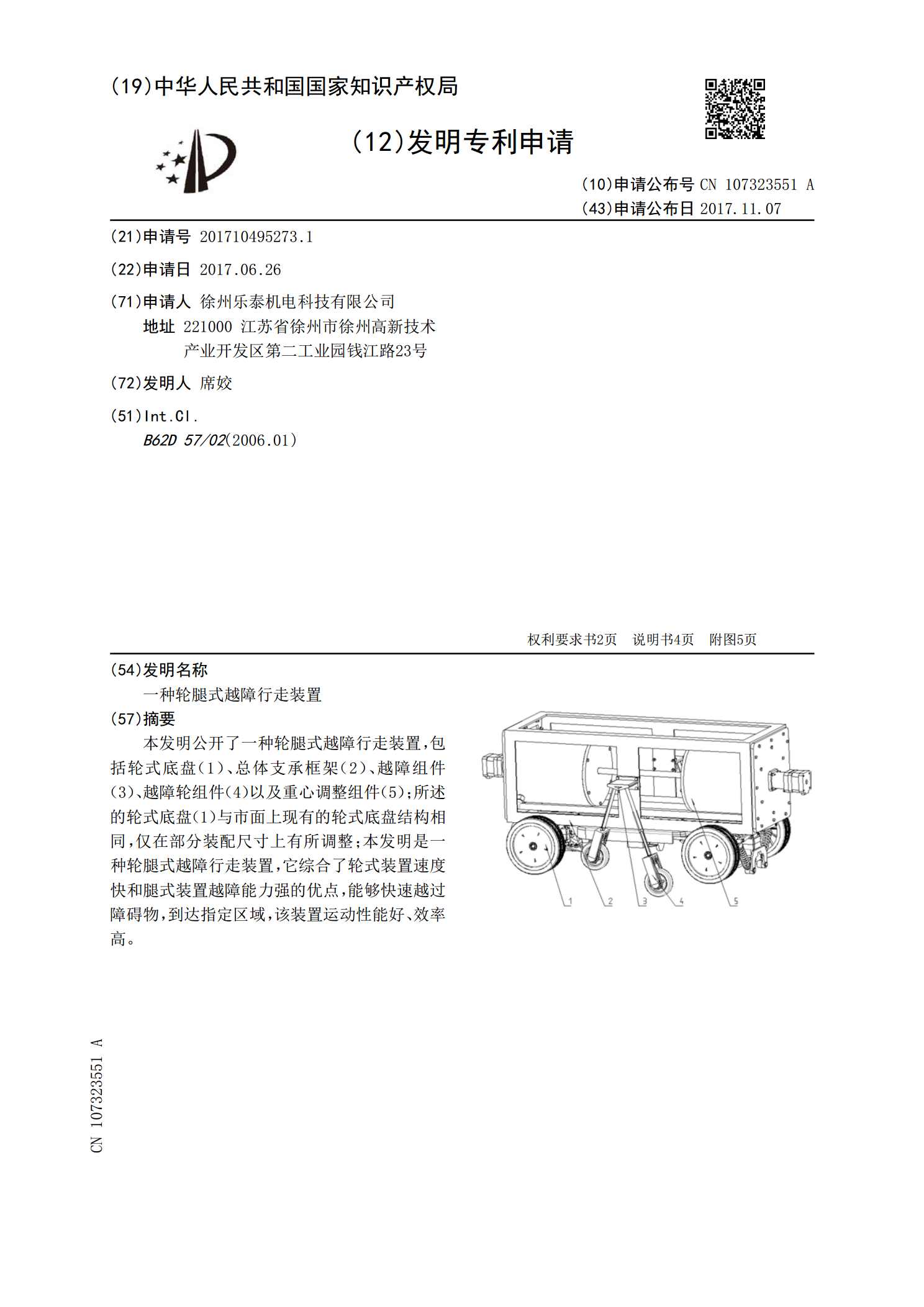
本发明公开了一种轮腿式越障行走装置,包括轮式底盘(1)、总体支承框架(2)、越障组件(3)、越障轮组件(4)以及重心调整组件(5);所述的轮式底盘(1)与市面上现有的轮式底盘结构相同,仅在部分装配尺寸上有所调整;本发明是一种轮腿式越障行走装置,它综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速越过障碍物,到达指定区域,该装置运动性能好、效率高。
一种新型的轮腿式越障平台.pdf
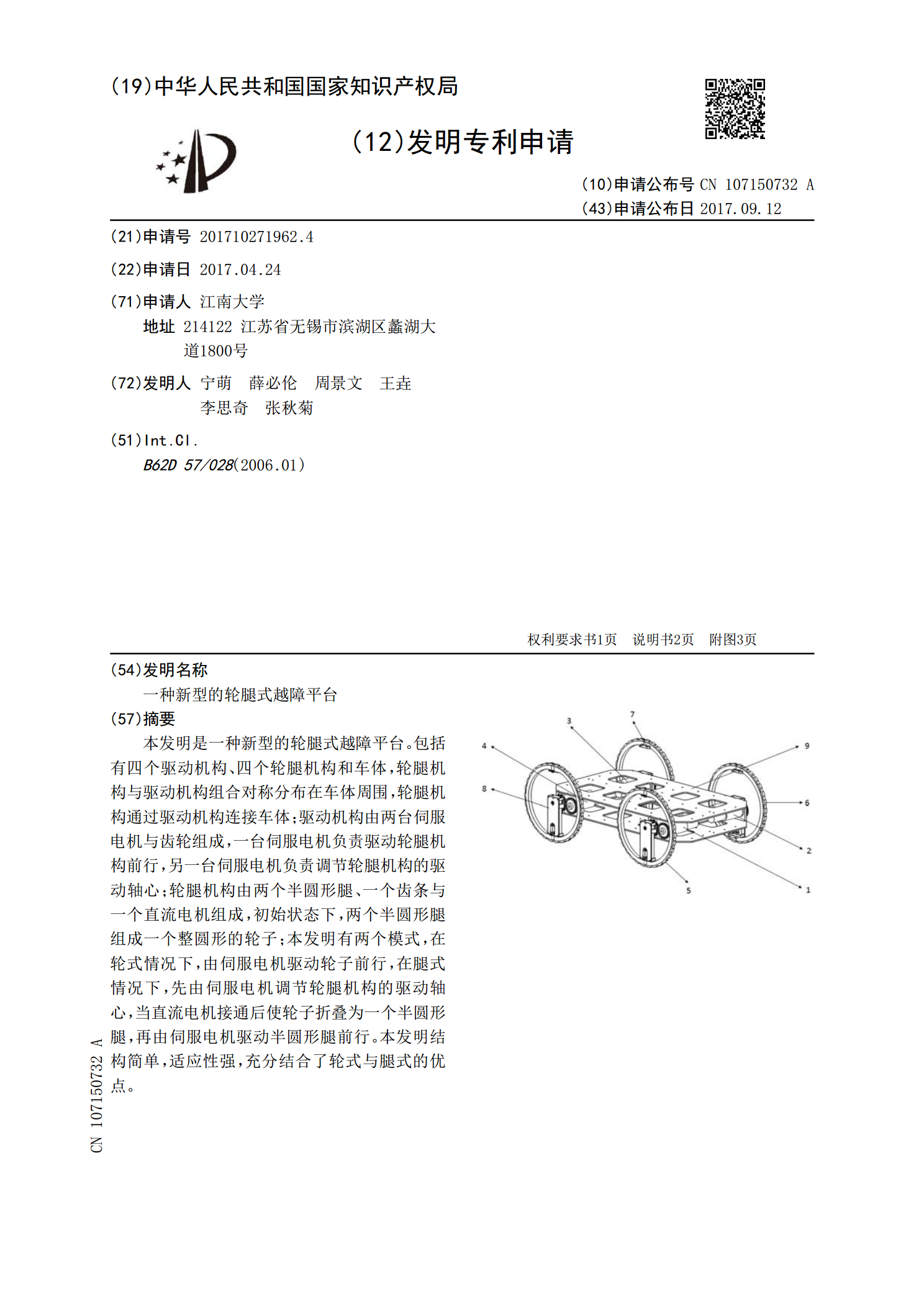
本发明是一种新型的轮腿式越障平台。包括有四个驱动机构、四个轮腿机构和车体,轮腿机构与驱动机构组合对称分布在车体周围,轮腿机构通过驱动机构连接车体;驱动机构由两台伺服电机与齿轮组成,一台伺服电机负责驱动轮腿机构前行,另一台伺服电机负责调节轮腿机构的驱动轴心;轮腿机构由两个半圆形腿、一个齿条与一个直流电机组成,初始状态下,两个半圆形腿组成一个整圆形的轮子;本发明有两个模式,在轮式情况下,由伺服电机驱动轮子前行,在腿式情况下,先由伺服电机调节轮腿机构的驱动轴心,当直流电机接通后使轮子折叠为一个半圆形腿,再由伺服