
越障轮及移动机器人.pdf

鹏飞****可爱


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
越障轮及移动机器人.pdf
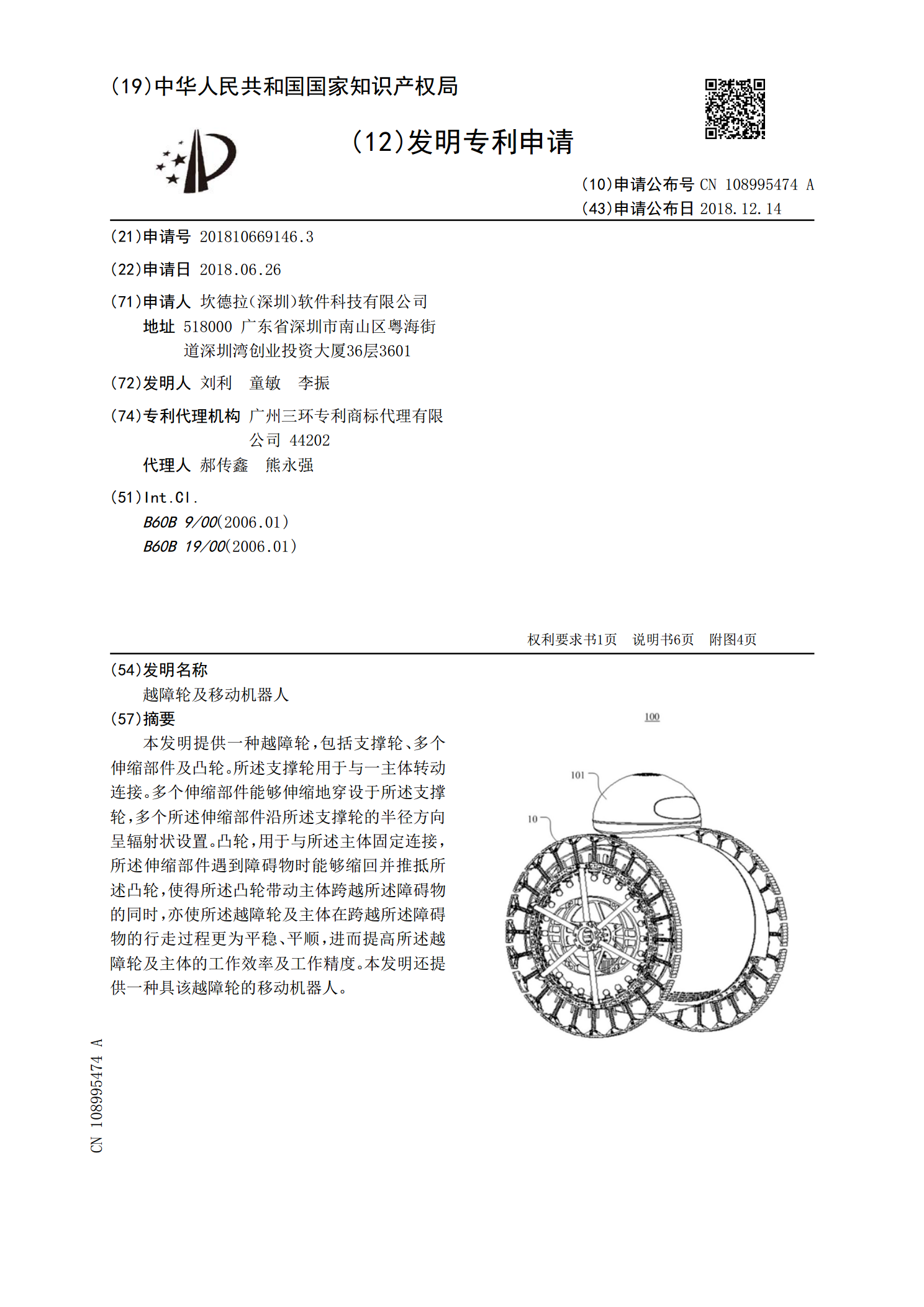
本发明提供一种越障轮,包括支撑轮、多个伸缩部件及凸轮。所述支撑轮用于与一主体转动连接。多个伸缩部件能够伸缩地穿设于所述支撑轮,多个所述伸缩部件沿所述支撑轮的半径方向呈辐射状设置。凸轮,用于与所述主体固定连接,所述伸缩部件遇到障碍物时能够缩回并推抵所述凸轮,使得所述凸轮带动主体跨越所述障碍物的同时,亦使所述越障轮及主体在跨越所述障碍物的行走过程更为平稳、平顺,进而提高所述越障轮及主体的工作效率及工作精度。本发明还提供一种具该越障轮的移动机器人。

悬臂式六轮移动机器人越障性能研究.pptx
,目录PartOnePartTwo悬臂式六轮移动机器人的应用领域越障性能的重要性研究目的与意义PartThree机器人结构组成工作原理介绍关键技术分析PartFour越障性能评价指标越障性能评价方法实验设计与实施PartFive实验数据整理与统计实验结果分析结果讨论与解释PartSix越障性能优化方案技术创新点与优势分析未来研究方向与展望PartSeven研究结论总结研究成果与贡献分析研究不足与改进方向THANKS

小型轮履变结构移动机器人设计及越障分析.docx
小型轮履变结构移动机器人设计及越障分析小型轮履变结构移动机器人设计及越障分析摘要:本文设计了一种小型轮履变结构移动机器人,并且进行了越障分析。该机器人采用轮履变结构,可以实现更灵活的机动性,适应更复杂的环境。文中首先介绍了机器人的总体结构,包括底盘、轮履、传动系统、控制系统等模块。然后详细介绍了机器人的越障分析方法,包括传感器检测、障碍判断、路径规划等步骤。最后,对机器人进行了实验,验证了设计的有效性和越障分析算法的可行性。关键词:小型轮履变结构移动机器人,越障分析,路径规划,传感器检测一、引言移动机器人

一种用于移动机器人的变位越障轮腿.pdf
本发明公开了一种用于移动机器人的变位越障轮腿,轮腿包括驱动装置、驱动装置壳体、支撑腿、移动轮。驱动装置包括驱动电动机、减速器、外螺纹丝杠、内螺纹丝杠从动件,支撑腿包括长支撑腿、短支撑腿,驱动电动机与减速器安装在驱动装置壳体的一端,长支撑腿一端铰接在内螺纹丝杠从动件上,底端安装有移动轮,内螺纹丝杠从动件啮合外螺纹丝杠,驱动电机旋转带动内螺纹丝杠从动件在外螺纹丝杠上沿着驱动装置壳体长度方向向外或向内移动,内螺纹丝杠从动件带动支撑腿移动来调整移动轮的垂直位置,本发明的创新点在于轮腿通过自身的变位变形即可调节移动

悬臂式六轮移动机器人越障性能研究的综述报告.docx
悬臂式六轮移动机器人越障性能研究的综述报告随着机器人技术的不断发展,在实际生产和生活中越来越多地使用机器人,特别是移动机器人,因为它们可以在不受限制的环境中进行非常有用的工作。悬臂式六轮移动机器人是其中一种类型,它拥有独特的设计和性能,使其能够克服各种障碍物并进行多种任务。在这篇综述报告中,我们将对悬臂式六轮移动机器人的越障性能进行详细介绍。悬臂式六轮移动机器人的设计和结构使其具有在不同地形和障碍物上移动和操作的能力。该机器人的底盘由六个带有驱动轮和悬挂机构的轮组成,底部的悬臂则提供稳定性和平衡能力。这种