
一种新型轮腿复合式变位越障移动机器人.pdf

春兰****89


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型轮腿复合式变位越障移动机器人.pdf
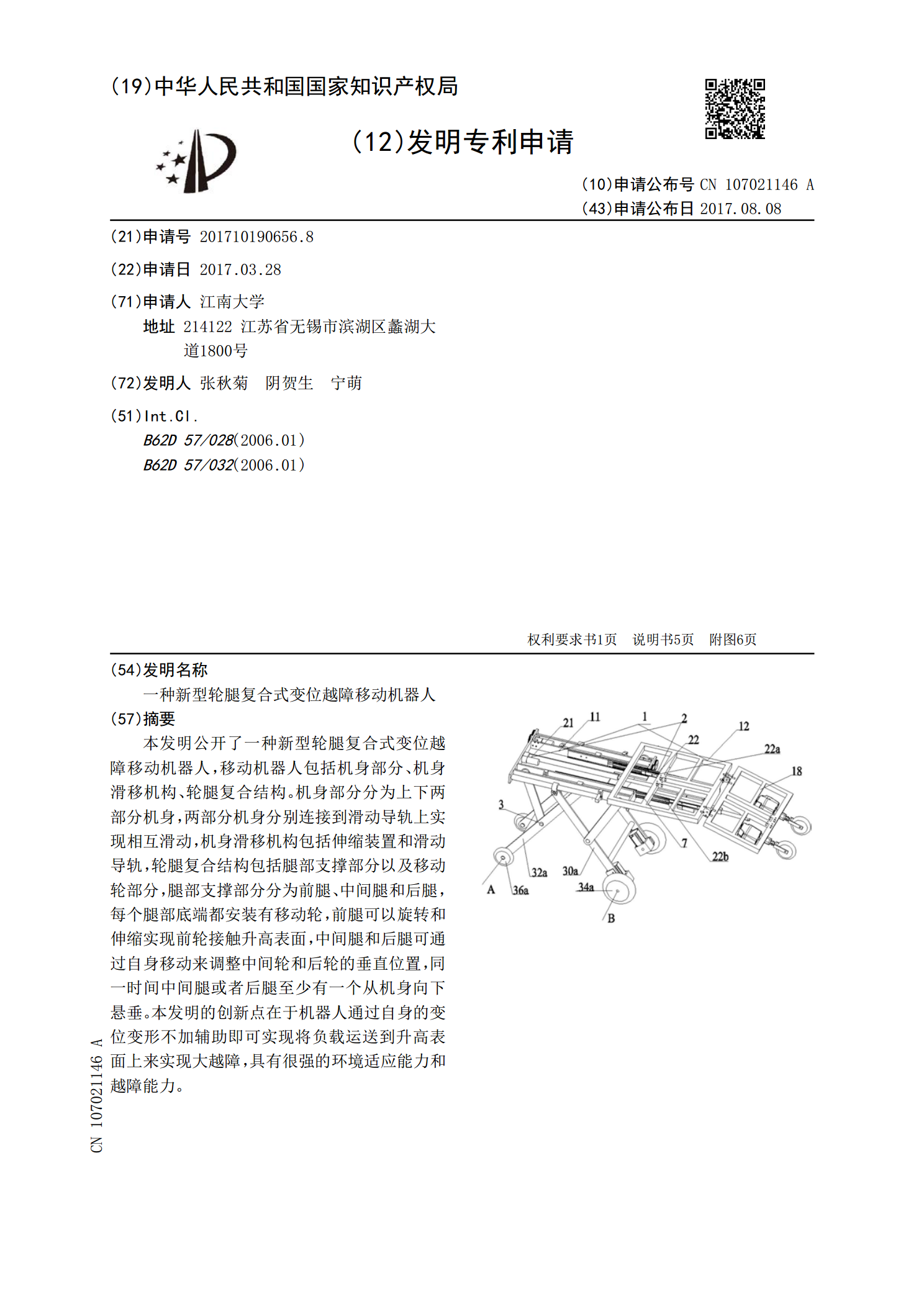
本发明公开了一种新型轮腿复合式变位越障移动机器人,移动机器人包括机身部分、机身滑移机构、轮腿复合结构。机身部分分为上下两部分机身,两部分机身分别连接到滑动导轨上实现相互滑动,机身滑移机构包括伸缩装置和滑动导轨,轮腿复合结构包括腿部支撑部分以及移动轮部分,腿部支撑部分分为前腿、中间腿和后腿,每个腿部底端都安装有移动轮,前腿可以旋转和伸缩实现前轮接触升高表面,中间腿和后腿可通过自身移动来调整中间轮和后轮的垂直位置,同一时间中间腿或者后腿至少有一个从机身向下悬垂。本发明的创新点在于机器人通过自身的变位变形不加辅

一种用于移动机器人的变位越障轮腿.pdf
本发明公开了一种用于移动机器人的变位越障轮腿,轮腿包括驱动装置、驱动装置壳体、支撑腿、移动轮。驱动装置包括驱动电动机、减速器、外螺纹丝杠、内螺纹丝杠从动件,支撑腿包括长支撑腿、短支撑腿,驱动电动机与减速器安装在驱动装置壳体的一端,长支撑腿一端铰接在内螺纹丝杠从动件上,底端安装有移动轮,内螺纹丝杠从动件啮合外螺纹丝杠,驱动电机旋转带动内螺纹丝杠从动件在外螺纹丝杠上沿着驱动装置壳体长度方向向外或向内移动,内螺纹丝杠从动件带动支撑腿移动来调整移动轮的垂直位置,本发明的创新点在于轮腿通过自身的变位变形即可调节移动
一种新型的轮腿式越障平台.pdf
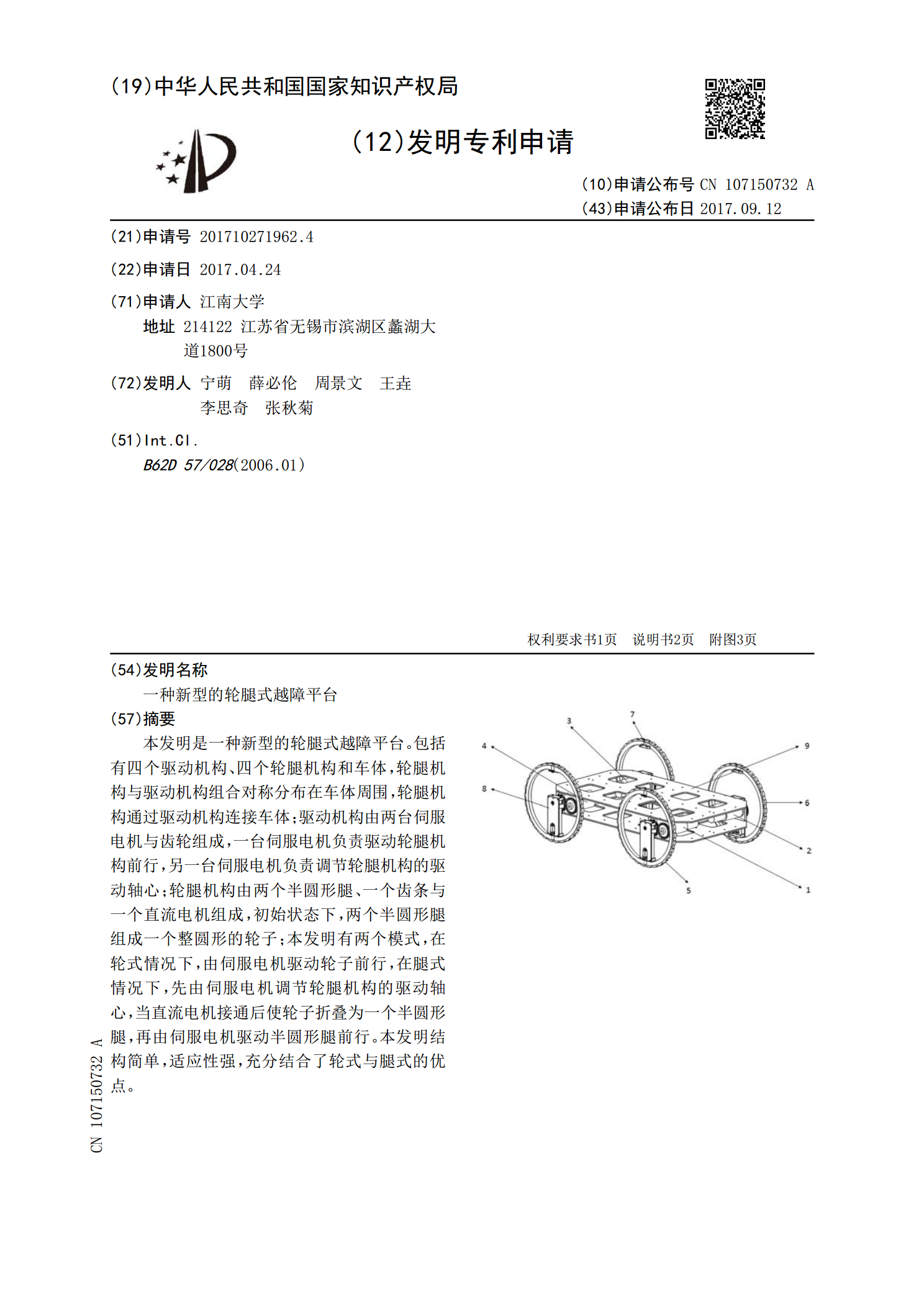
本发明是一种新型的轮腿式越障平台。包括有四个驱动机构、四个轮腿机构和车体,轮腿机构与驱动机构组合对称分布在车体周围,轮腿机构通过驱动机构连接车体;驱动机构由两台伺服电机与齿轮组成,一台伺服电机负责驱动轮腿机构前行,另一台伺服电机负责调节轮腿机构的驱动轴心;轮腿机构由两个半圆形腿、一个齿条与一个直流电机组成,初始状态下,两个半圆形腿组成一个整圆形的轮子;本发明有两个模式,在轮式情况下,由伺服电机驱动轮子前行,在腿式情况下,先由伺服电机调节轮腿机构的驱动轴心,当直流电机接通后使轮子折叠为一个半圆形腿,再由伺服

一种轮腿复合式越障行走机构.pdf
本发明提供一种轮腿复合式越障行走机构,属于车辆行走技术领域。本发明的越障行走机构包括驱动齿轮、车轮支架、车轮、左驱动轴、右驱动轴、第一单向端齿环、双向端齿环、第二单向端齿环、压缩弹簧、盘形力矩传感器、第一环形电磁吸盘、第二环形电磁吸盘、第一圆柱齿轮、第二圆柱齿轮、转臂轴、转臂箱体、第一转臂齿轮、第二转臂齿轮、越障轴、越障杆、第一回位弹簧以及第二回位弹簧。该行走机构中的双向端齿环在盘形力矩传感器、第一环形电磁吸盘、第二环形电磁吸盘和压缩弹簧的作用下利用花键副实现轴向移动,可以分别与第一单向端齿环或第二单向端
林区小型轮腿复合式移动越障机构.pdf
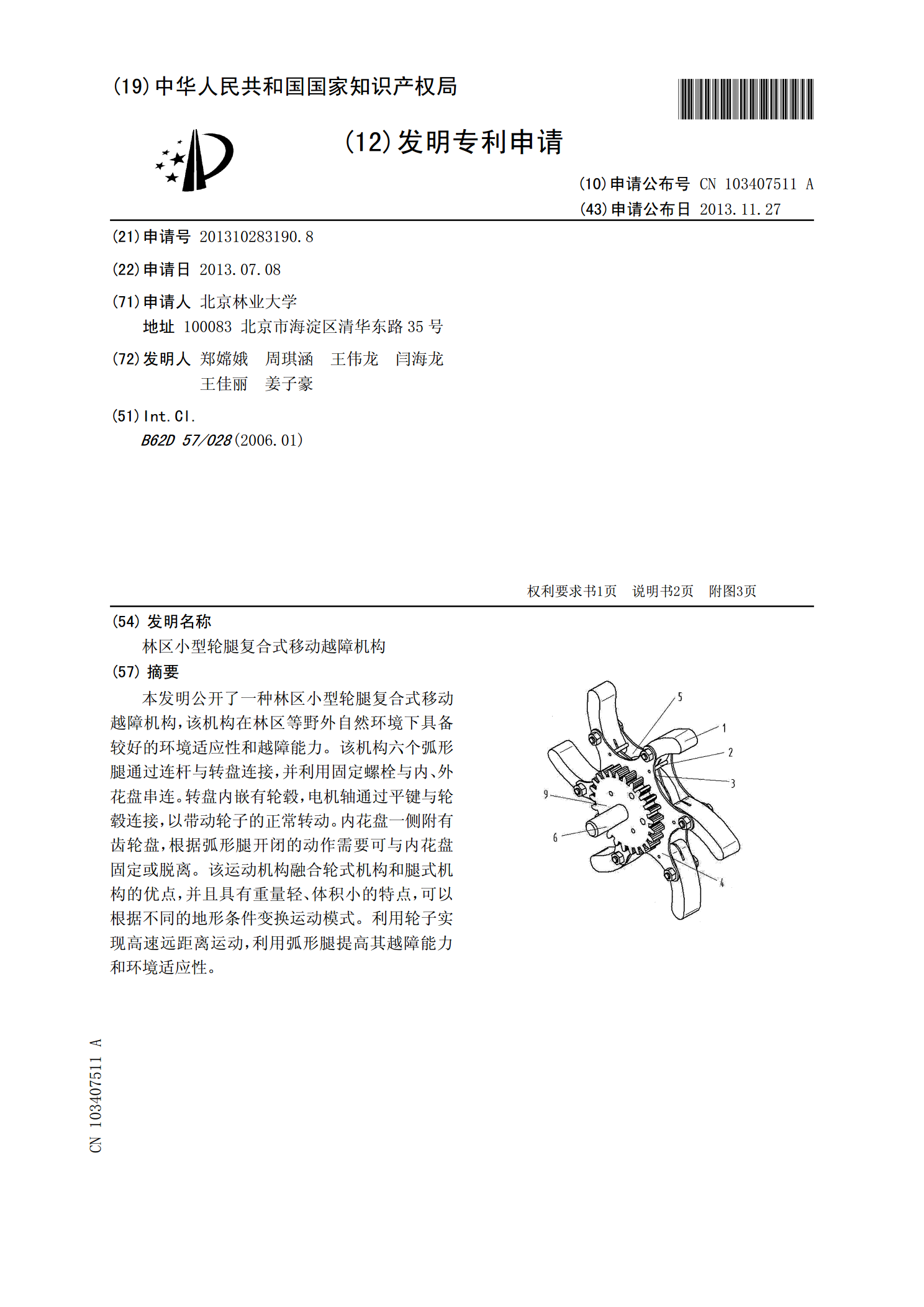
本发明公开了一种林区小型轮腿复合式移动越障机构,该机构在林区等野外自然环境下具备较好的环境适应性和越障能力。该机构六个弧形腿通过连杆与转盘连接,并利用固定螺栓与内、外花盘串连。转盘内嵌有轮毂,电机轴通过平键与轮毂连接,以带动轮子的正常转动。内花盘一侧附有齿轮盘,根据弧形腿开闭的动作需要可与内花盘固定或脱离。该运动机构融合轮式机构和腿式机构的优点,并且具有重量轻、体积小的特点,可以根据不同的地形条件变换运动模式。利用轮子实现高速远距离运动,利用弧形腿提高其越障能力和环境适应性。