
面向下肢踝关节外骨骼机器人的变刚度柔性驱动器.pdf

Ja****23

1/8
2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
面向下肢踝关节外骨骼机器人的变刚度柔性驱动器.pdf
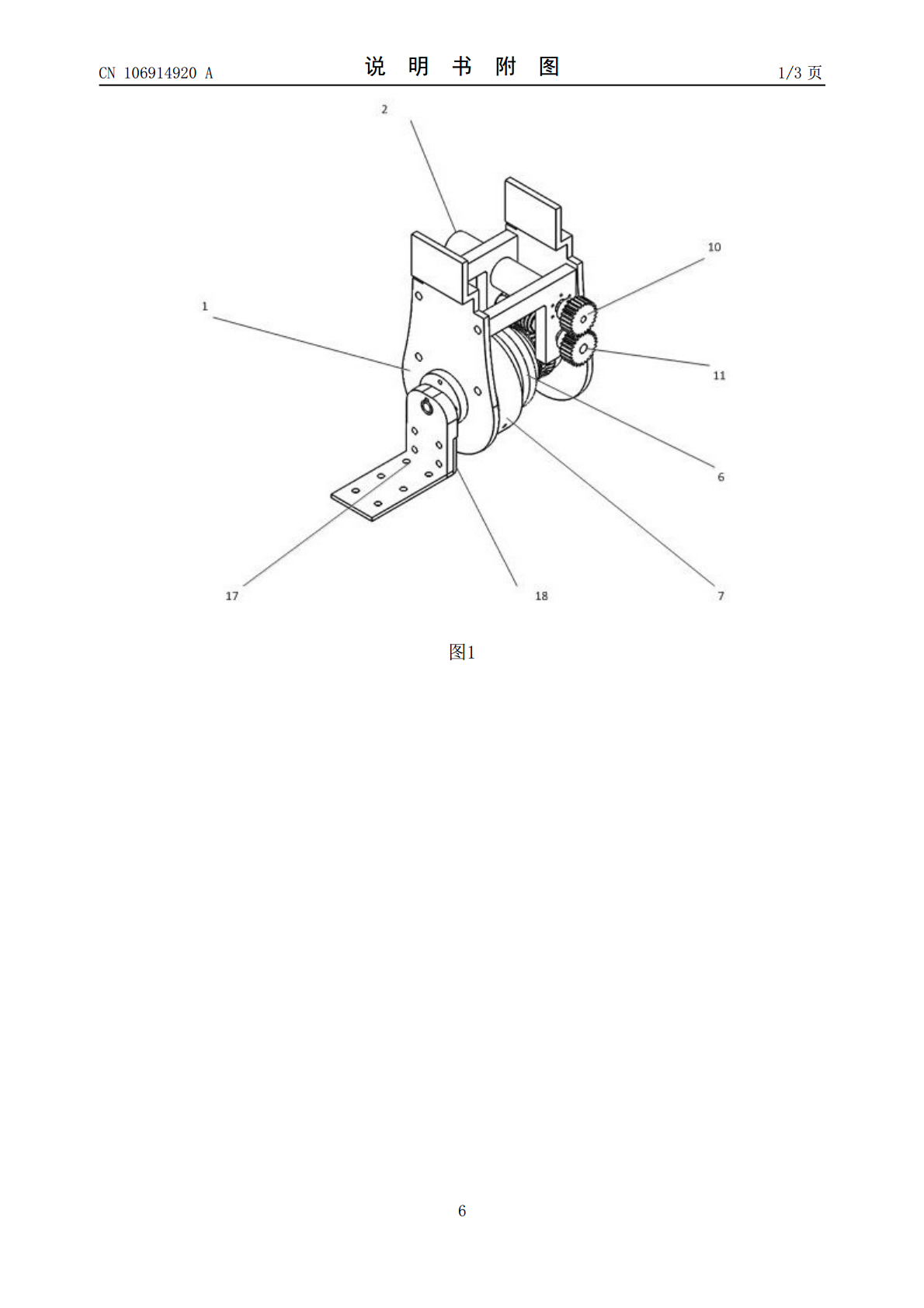
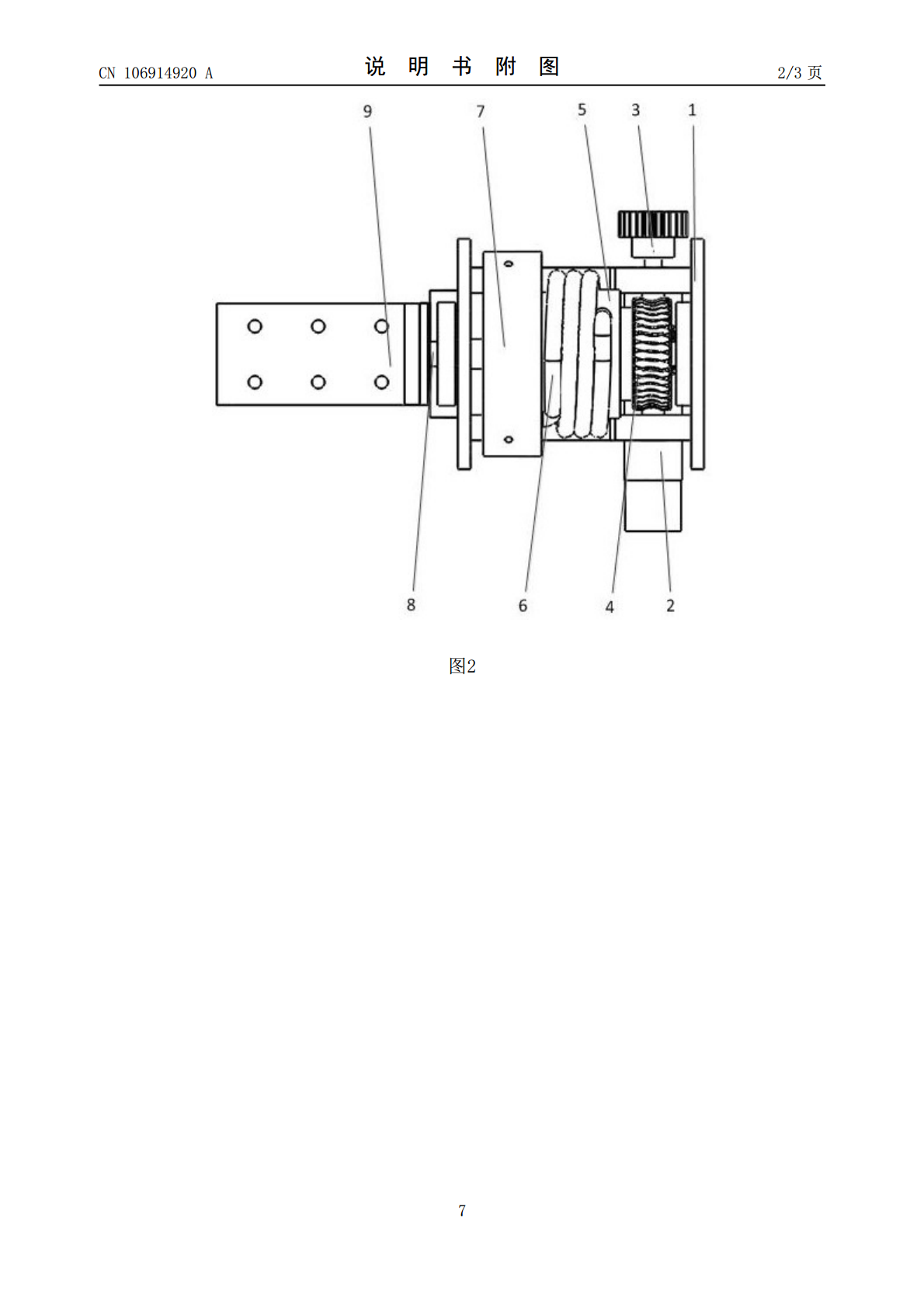
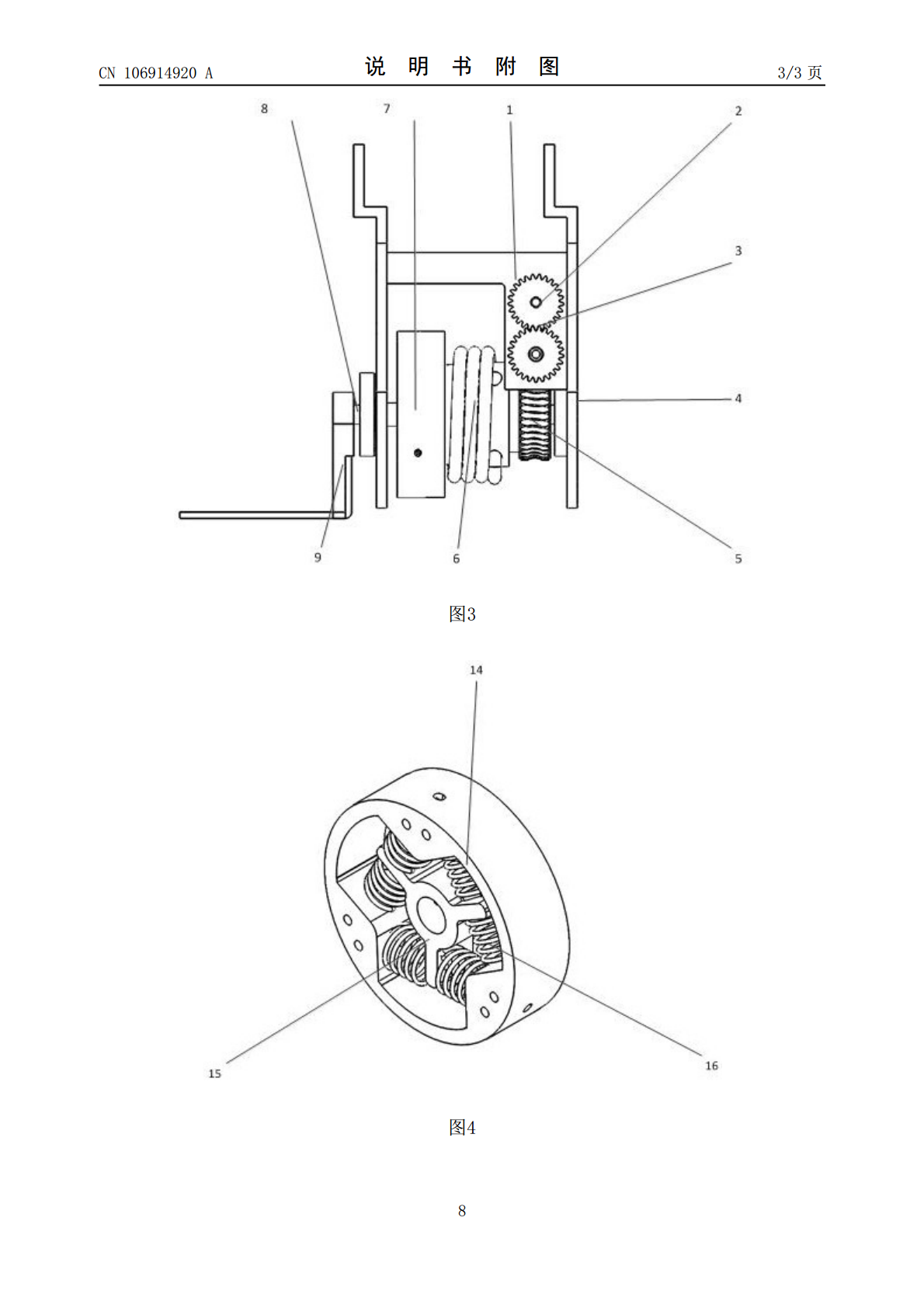
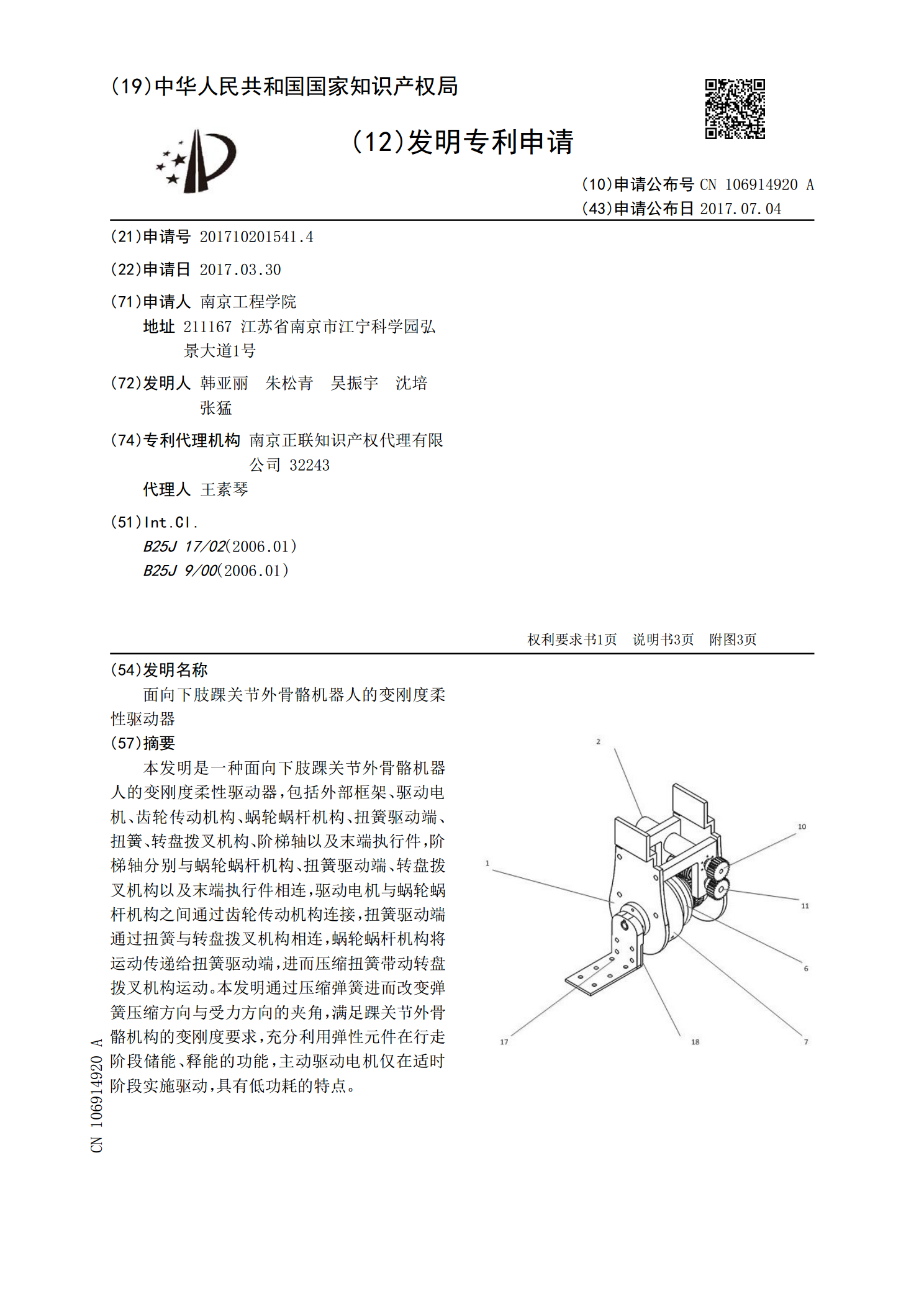
本发明是一种面向下肢踝关节外骨骼机器人的变刚度柔性驱动器,包括外部框架、驱动电机、齿轮传动机构、蜗轮蜗杆机构、扭簧驱动端、扭簧、转盘拨叉机构、阶梯轴以及末端执行件,阶梯轴分别与蜗轮蜗杆机构、扭簧驱动端、转盘拨叉机构以及末端执行件相连,驱动电机与蜗轮蜗杆机构之间通过齿轮传动机构连接,扭簧驱动端通过扭簧与转盘拨叉机构相连,蜗轮蜗杆机构将运动传递给扭簧驱动端,进而压缩扭簧带动转盘拨叉机构运动。本发明通过压缩弹簧进而改变弹簧压缩方向与受力方向的夹角,满足踝关节外骨骼机构的变刚度要求,充分利用弹性元件在行走阶段储能

一种基于变刚度弹簧的柔性下肢外骨骼.pdf
本发明属于下肢外骨骼机器人领域,公开了一种基于变刚度弹簧的柔性下肢外骨骼,其通过设置n‑1个尼龙细绳和n个弹簧元件,第i尼龙细绳两端分别相对于第i弹簧元件的两端固定,且第i尼龙细绳预留一指定的松弛预留量,以限制第i弹簧元件的最大拉伸长度,i=1、2、…n‑1,实现运动过程中的刚度变化,运动到不同阶段时不同的尼龙细绳绷直,从而使相应的弹簧元件不能继续拉伸,改变弹簧元件的总刚度,有效地储存能量,但是尼龙细绳不限制弹簧元件的回复,从而使得弹簧元件能在回复时提供助力,最终达到减小人体在行走、蹲起过程中代谢消耗的目

面向人机交互的机器人变刚度柔性驱动器设计与分析.pptx
汇报人:目录PARTONE驱动器结构设计材料选择与特性驱动器工作原理驱动器性能指标PARTTWO医疗康复领域服务机器人领域家用机器人领域工业机器人领域PARTTHREE动力学模型建立运动学模型建立刚度调节机制分析驱动器性能优化方法PARTFOUR实验设计实验结果结果分析实验结论PARTFIVE研究结论研究不足与展望THANKYOU

基于变刚度驱动的下肢外骨骼.docx
基于变刚度驱动的下肢外骨骼基于变刚度驱动的下肢外骨骼技术概述:下肢外骨骼技术是一种应用于康复和助行领域的创新技术。它可以提供力量支持和运动协助,帮助行动受限的人恢复步态功能和进行日常活动。然而,传统的下肢外骨骼系统通常是刚性设计,无法适应不同用户的个体差异和运动需求。为了解决这一问题,变刚度驱动技术应运而生。变刚度驱动的原理:变刚度驱动的下肢外骨骼技术通过可调节的刚度设计,实现根据用户需求提供不同程度的力量支持或运动协助。这种技术通常由电机、传感器和控制算法组成。电机提供动力驱动,传感器收集用户需要的运动
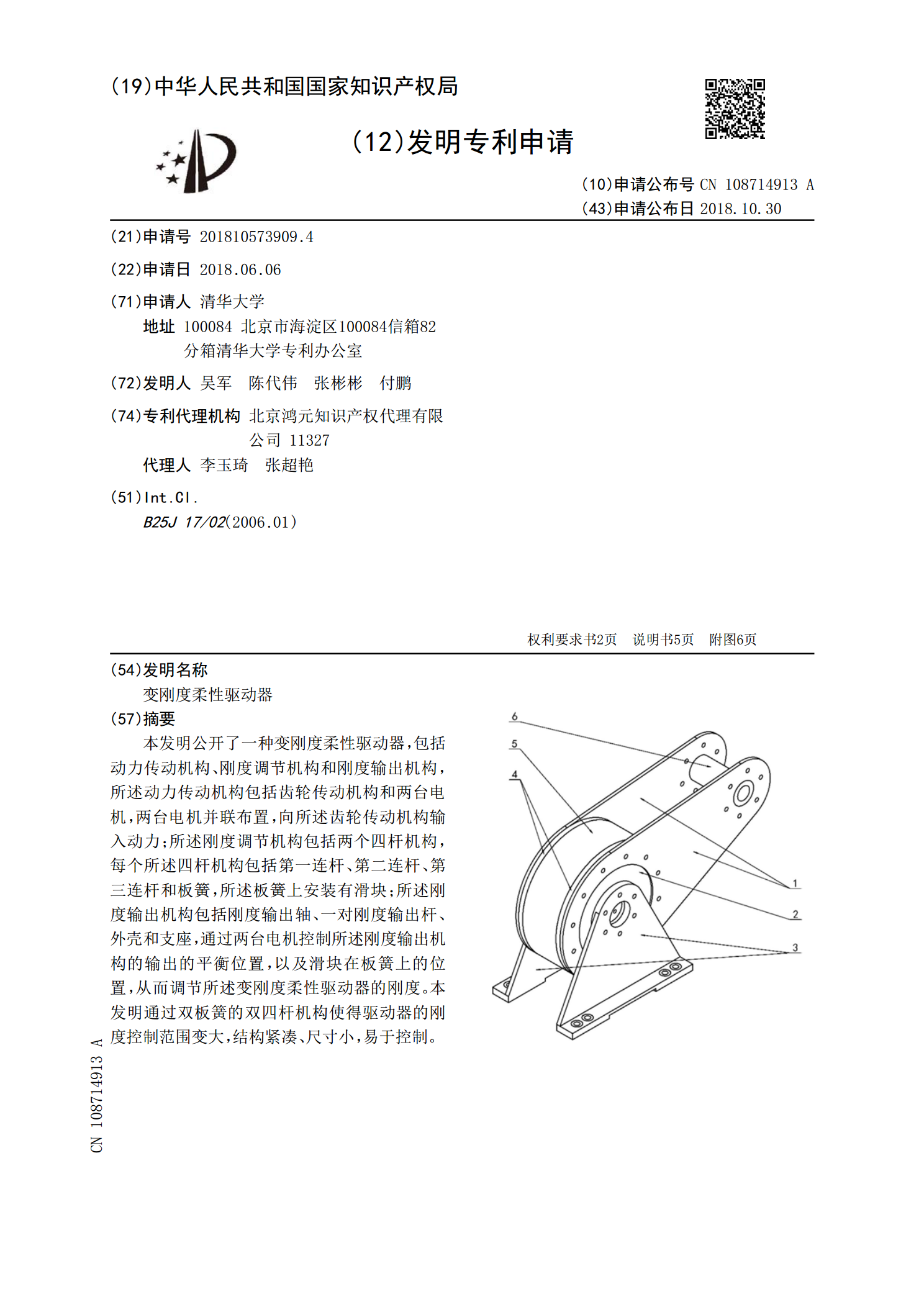
变刚度柔性驱动器.pdf
本发明公开了一种变刚度柔性驱动器,包括动力传动机构、刚度调节机构和刚度输出机构,所述动力传动机构包括齿轮传动机构和两台电机,两台电机并联布置,向所述齿轮传动机构输入动力;所述刚度调节机构包括两个四杆机构,每个所述四杆机构包括第一连杆、第二连杆、第三连杆和板簧,所述板簧上安装有滑块;所述刚度输出机构包括刚度输出轴、一对刚度输出杆、外壳和支座,通过两台电机控制所述刚度输出机构的输出的平衡位置,以及滑块在板簧上的位置,从而调节所述变刚度柔性驱动器的刚度。本发明通过双板簧的双四杆机构使得驱动器的刚度控制范围变大,