
一种基于变刚度弹簧的柔性下肢外骨骼.pdf

文阁****23

1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于变刚度弹簧的柔性下肢外骨骼.pdf
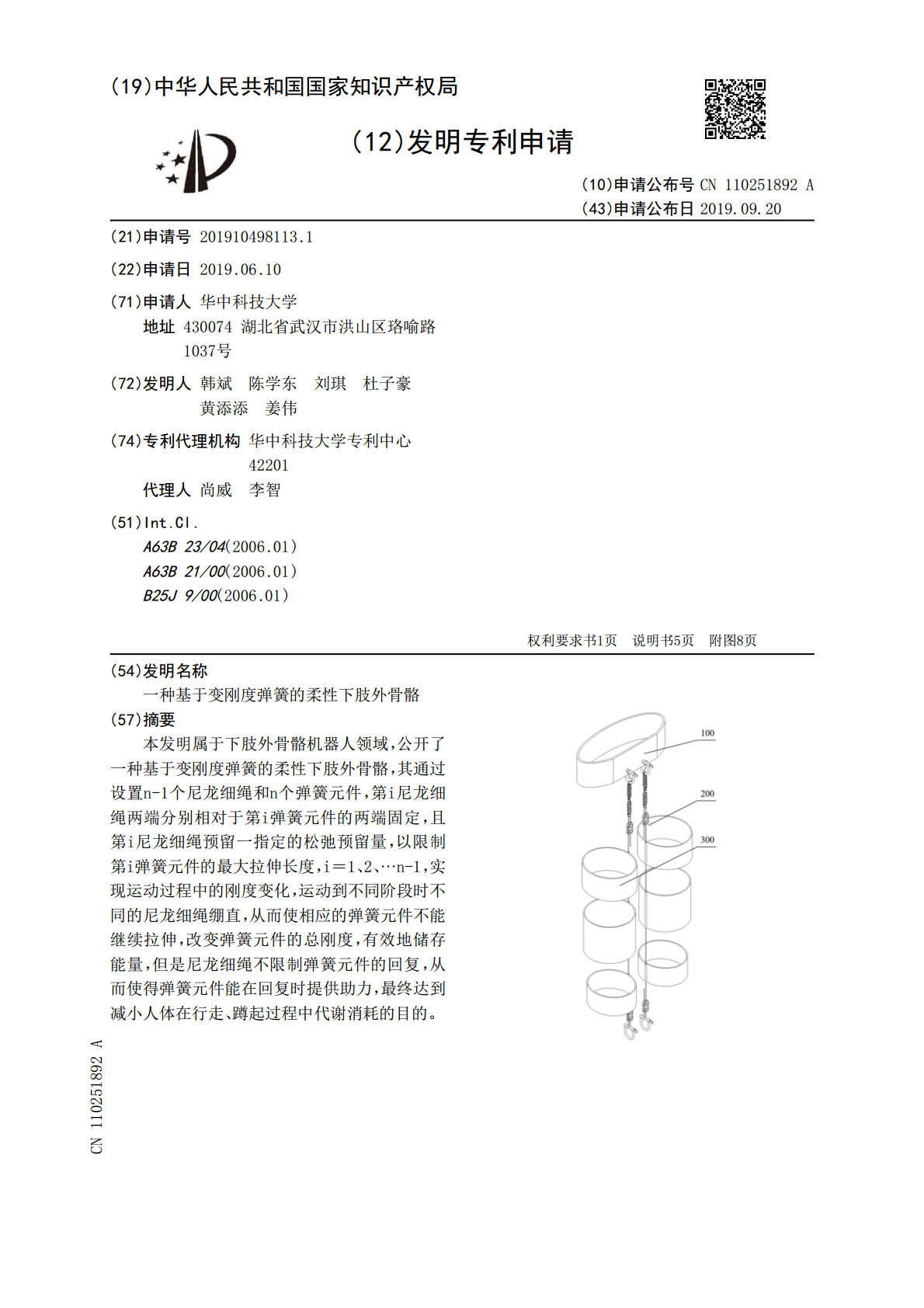
本发明属于下肢外骨骼机器人领域,公开了一种基于变刚度弹簧的柔性下肢外骨骼,其通过设置n‑1个尼龙细绳和n个弹簧元件,第i尼龙细绳两端分别相对于第i弹簧元件的两端固定,且第i尼龙细绳预留一指定的松弛预留量,以限制第i弹簧元件的最大拉伸长度,i=1、2、…n‑1,实现运动过程中的刚度变化,运动到不同阶段时不同的尼龙细绳绷直,从而使相应的弹簧元件不能继续拉伸,改变弹簧元件的总刚度,有效地储存能量,但是尼龙细绳不限制弹簧元件的回复,从而使得弹簧元件能在回复时提供助力,最终达到减小人体在行走、蹲起过程中代谢消耗的目

基于变刚度驱动的下肢外骨骼.docx
基于变刚度驱动的下肢外骨骼基于变刚度驱动的下肢外骨骼技术概述:下肢外骨骼技术是一种应用于康复和助行领域的创新技术。它可以提供力量支持和运动协助,帮助行动受限的人恢复步态功能和进行日常活动。然而,传统的下肢外骨骼系统通常是刚性设计,无法适应不同用户的个体差异和运动需求。为了解决这一问题,变刚度驱动技术应运而生。变刚度驱动的原理:变刚度驱动的下肢外骨骼技术通过可调节的刚度设计,实现根据用户需求提供不同程度的力量支持或运动协助。这种技术通常由电机、传感器和控制算法组成。电机提供动力驱动,传感器收集用户需要的运动
基于弹簧的变刚度变曲率变弯曲长度的多段柔性器械.pdf
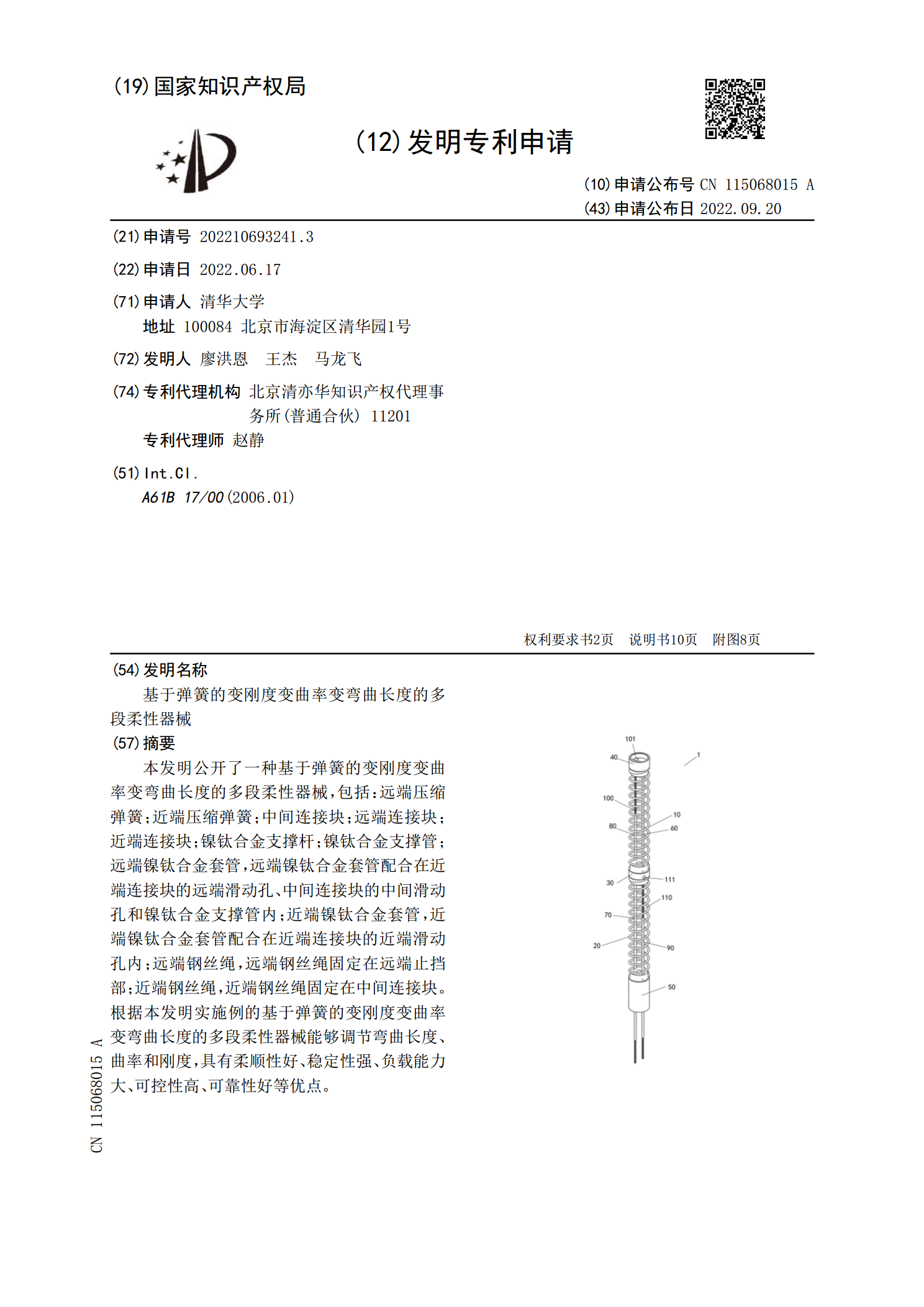
本发明公开了一种基于弹簧的变刚度变曲率变弯曲长度的多段柔性器械,包括:远端压缩弹簧;近端压缩弹簧;中间连接块;远端连接块;近端连接块;镍钛合金支撑杆;镍钛合金支撑管;远端镍钛合金套管,远端镍钛合金套管配合在近端连接块的远端滑动孔、中间连接块的中间滑动孔和镍钛合金支撑管内;近端镍钛合金套管,近端镍钛合金套管配合在近端连接块的近端滑动孔内;远端钢丝绳,远端钢丝绳固定在远端止挡部;近端钢丝绳,近端钢丝绳固定在中间连接块。根据本发明实施例的基于弹簧的变刚度变曲率变弯曲长度的多段柔性器械能够调节弯曲长度、曲率和刚度
面向下肢踝关节外骨骼机器人的变刚度柔性驱动器.pdf
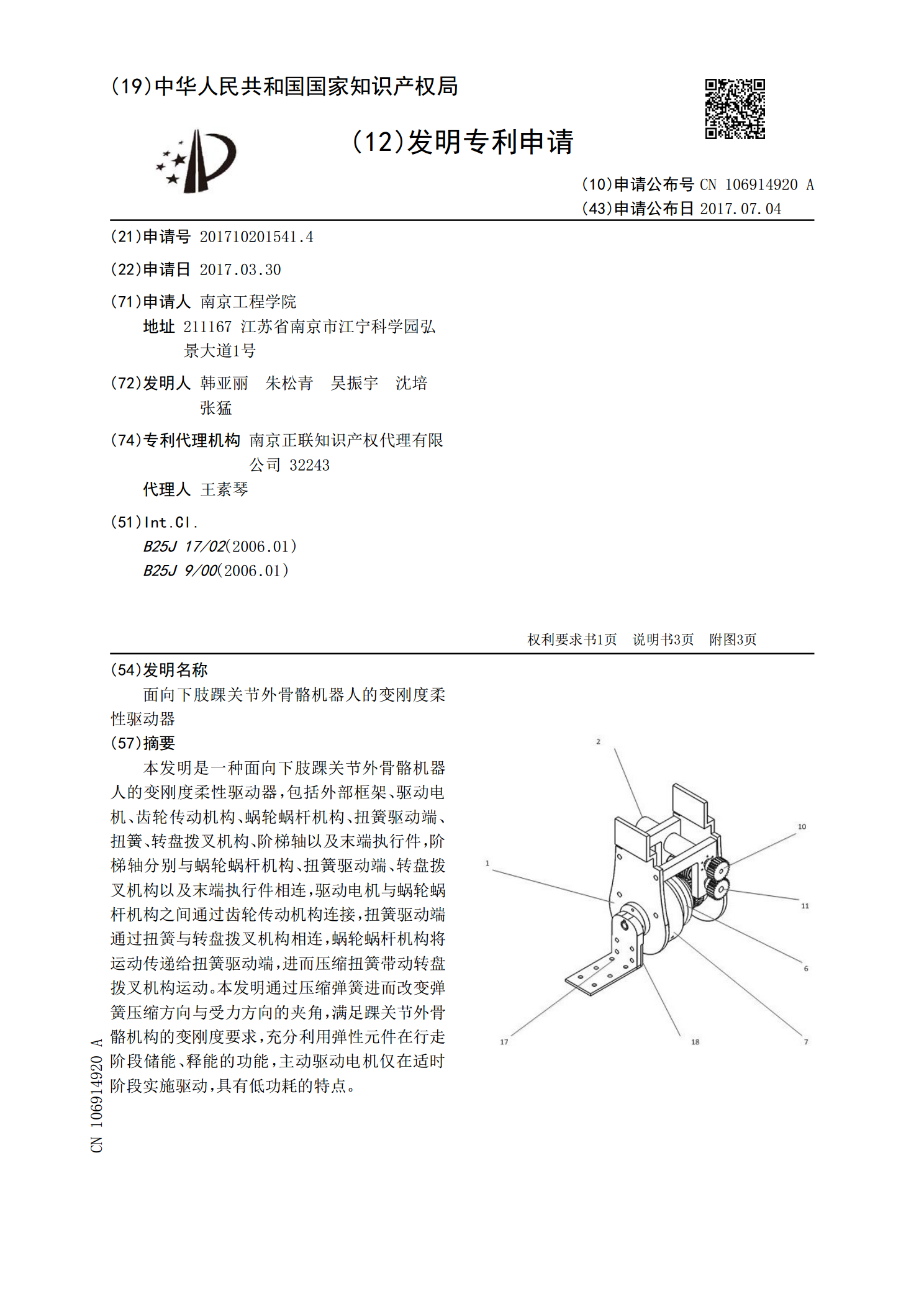
本发明是一种面向下肢踝关节外骨骼机器人的变刚度柔性驱动器,包括外部框架、驱动电机、齿轮传动机构、蜗轮蜗杆机构、扭簧驱动端、扭簧、转盘拨叉机构、阶梯轴以及末端执行件,阶梯轴分别与蜗轮蜗杆机构、扭簧驱动端、转盘拨叉机构以及末端执行件相连,驱动电机与蜗轮蜗杆机构之间通过齿轮传动机构连接,扭簧驱动端通过扭簧与转盘拨叉机构相连,蜗轮蜗杆机构将运动传递给扭簧驱动端,进而压缩扭簧带动转盘拨叉机构运动。本发明通过压缩弹簧进而改变弹簧压缩方向与受力方向的夹角,满足踝关节外骨骼机构的变刚度要求,充分利用弹性元件在行走阶段储能
一种柔性下肢外骨骼.pdf
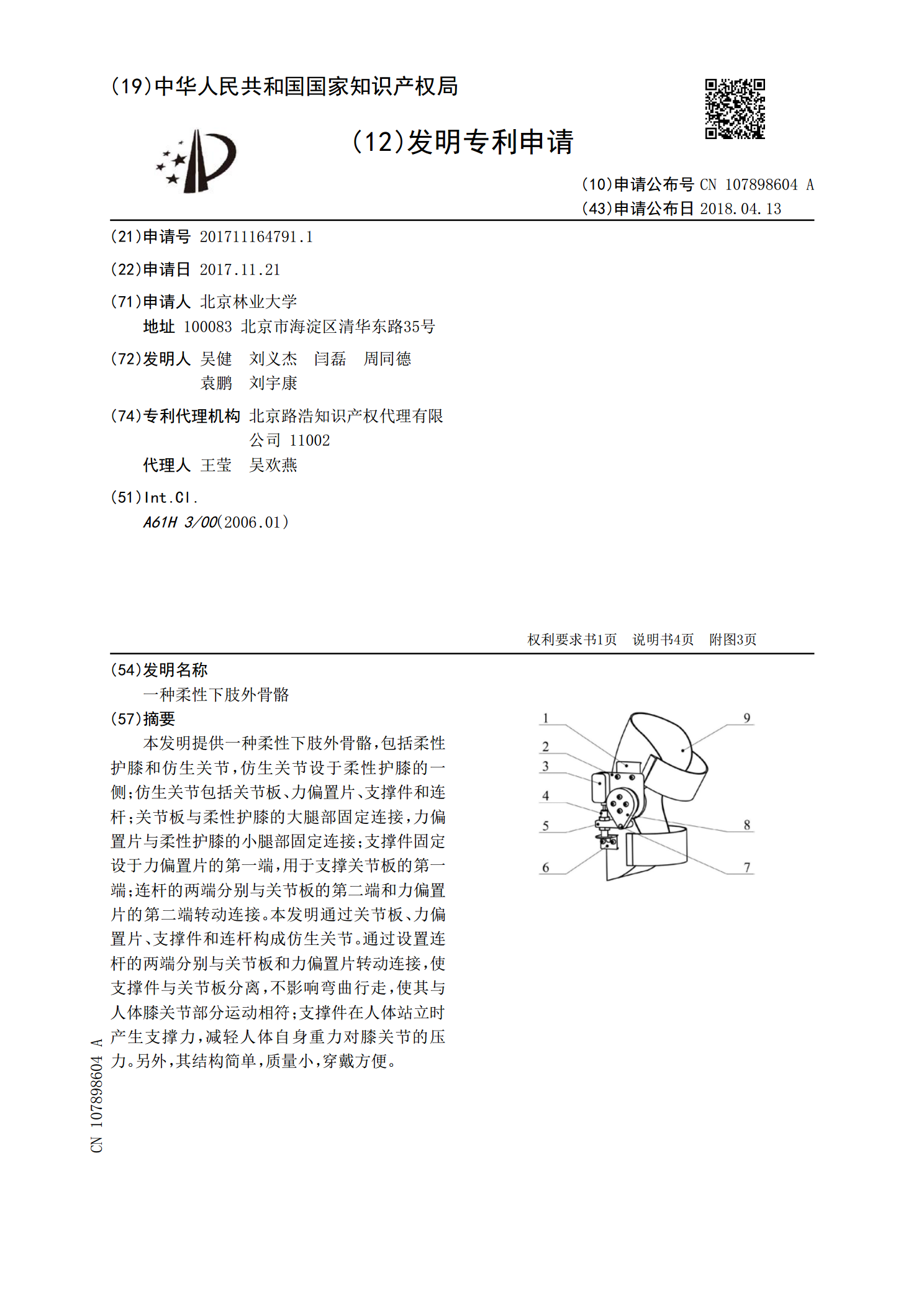
本发明提供一种柔性下肢外骨骼,包括柔性护膝和仿生关节,仿生关节设于柔性护膝的一侧;仿生关节包括关节板、力偏置片、支撑件和连杆;关节板与柔性护膝的大腿部固定连接,力偏置片与柔性护膝的小腿部固定连接;支撑件固定设于力偏置片的第一端,用于支撑关节板的第一端;连杆的两端分别与关节板的第二端和力偏置片的第二端转动连接。本发明通过关节板、力偏置片、支撑件和连杆构成仿生关节。通过设置连杆的两端分别与关节板和力偏置片转动连接,使支撑件与关节板分离,不影响弯曲行走,使其与人体膝关节部分运动相符;支撑件在人体站立时产生支撑力