
一种用于分布式驱动电动汽车的线控差动转向系统及方法.pdf

一只****呀淑


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于分布式驱动电动汽车的线控差动转向系统及方法.pdf
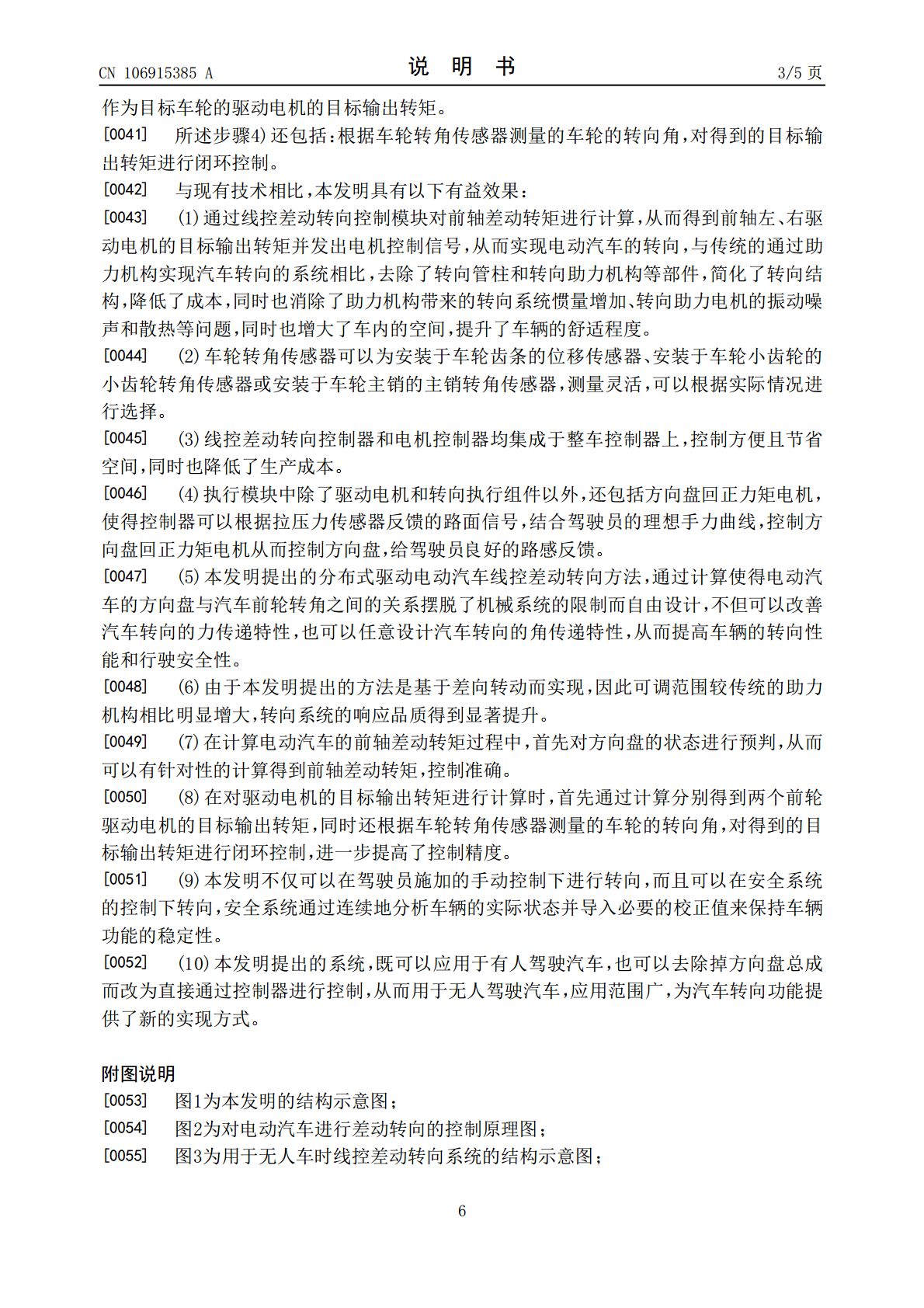
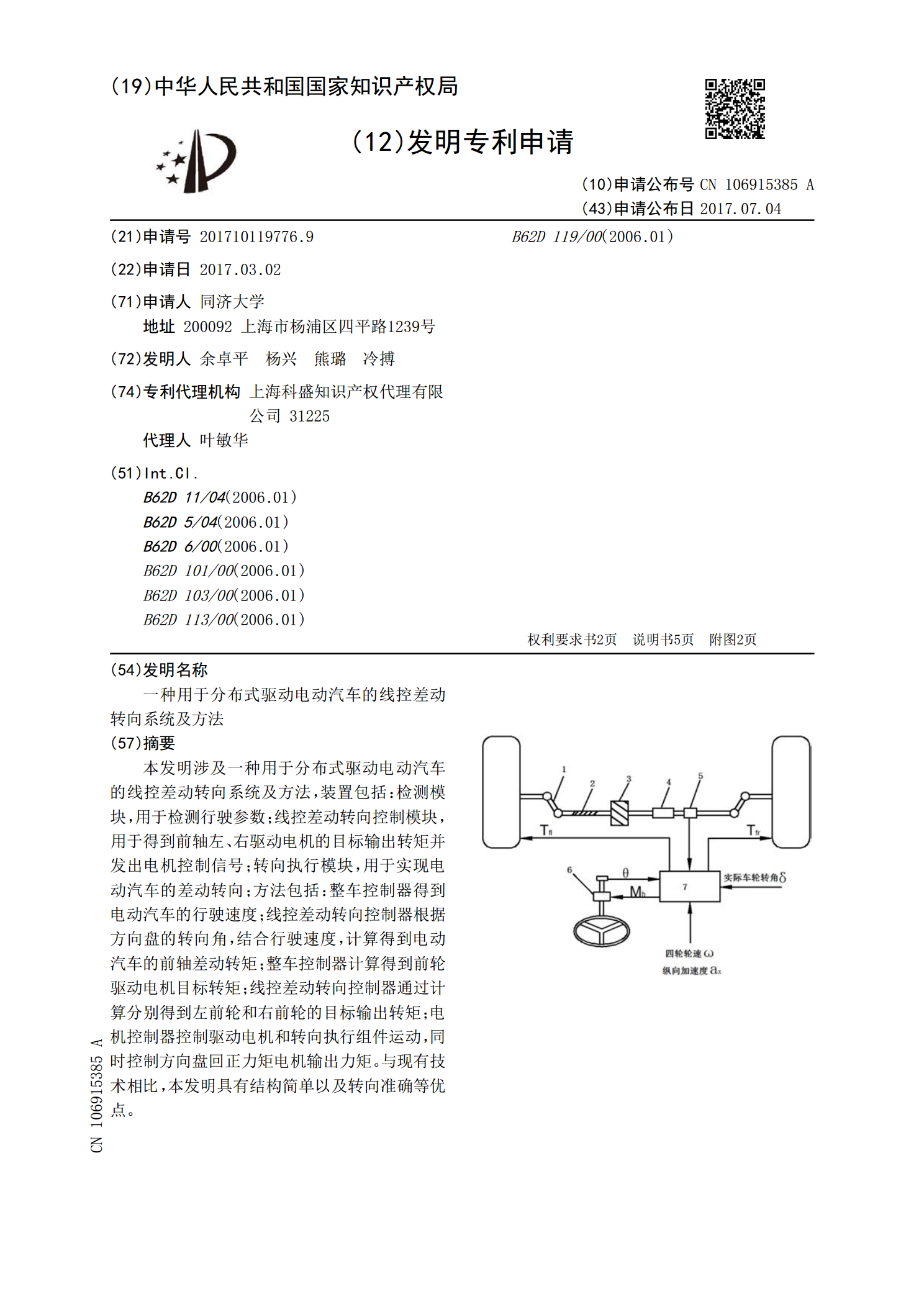
本发明涉及一种用于分布式驱动电动汽车的线控差动转向系统及方法,装置包括:检测模块,用于检测行驶参数;线控差动转向控制模块,用于得到前轴左、右驱动电机的目标输出转矩并发出电机控制信号;转向执行模块,用于实现电动汽车的差动转向;方法包括:整车控制器得到电动汽车的行驶速度;线控差动转向控制器根据方向盘的转向角,结合行驶速度,计算得到电动汽车的前轴差动转矩;整车控制器计算得到前轮驱动电机目标转矩;线控差动转向控制器通过计算分别得到左前轮和右前轮的目标输出转矩;电机控制器控制驱动电机和转向执行组件运动,同时控制方向
用于轮式独立驱动车辆的线控差动转向系统及其控制方法.pdf
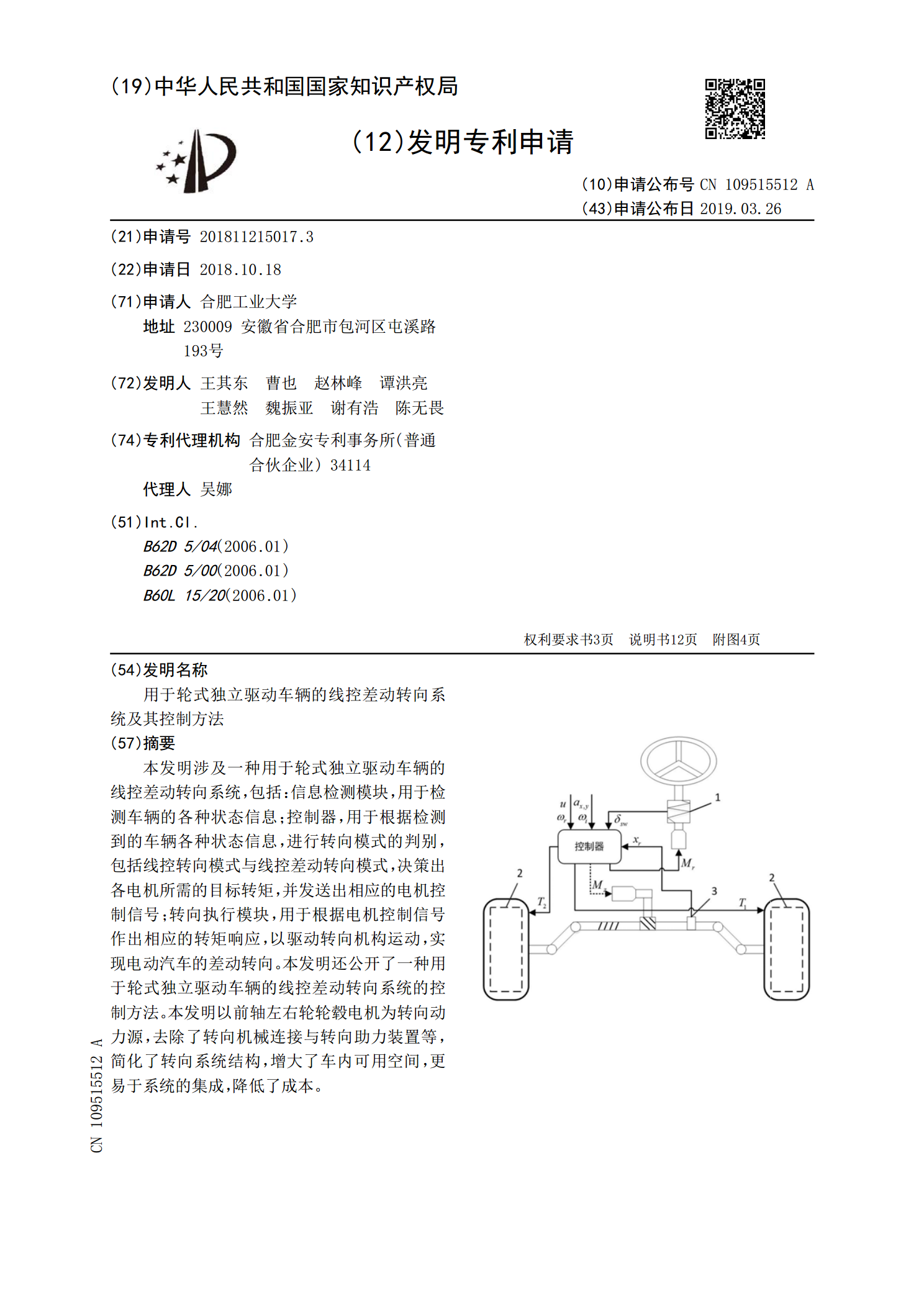
本发明涉及一种用于轮式独立驱动车辆的线控差动转向系统,包括:信息检测模块,用于检测车辆的各种状态信息;控制器,用于根据检测到的车辆各种状态信息,进行转向模式的判别,包括线控转向模式与线控差动转向模式,决策出各电机所需的目标转矩,并发送出相应的电机控制信号;转向执行模块,用于根据电机控制信号作出相应的转矩响应,以驱动转向机构运动,实现电动汽车的差动转向。本发明还公开了一种用于轮式独立驱动车辆的线控差动转向系统的控制方法。本发明以前轴左右轮轮毂电机为转向动力源,去除了转向机械连接与转向助力装置等,简化了转向系
一种分布式驱动电动汽车的差动助力转向控制系统及方法.pdf
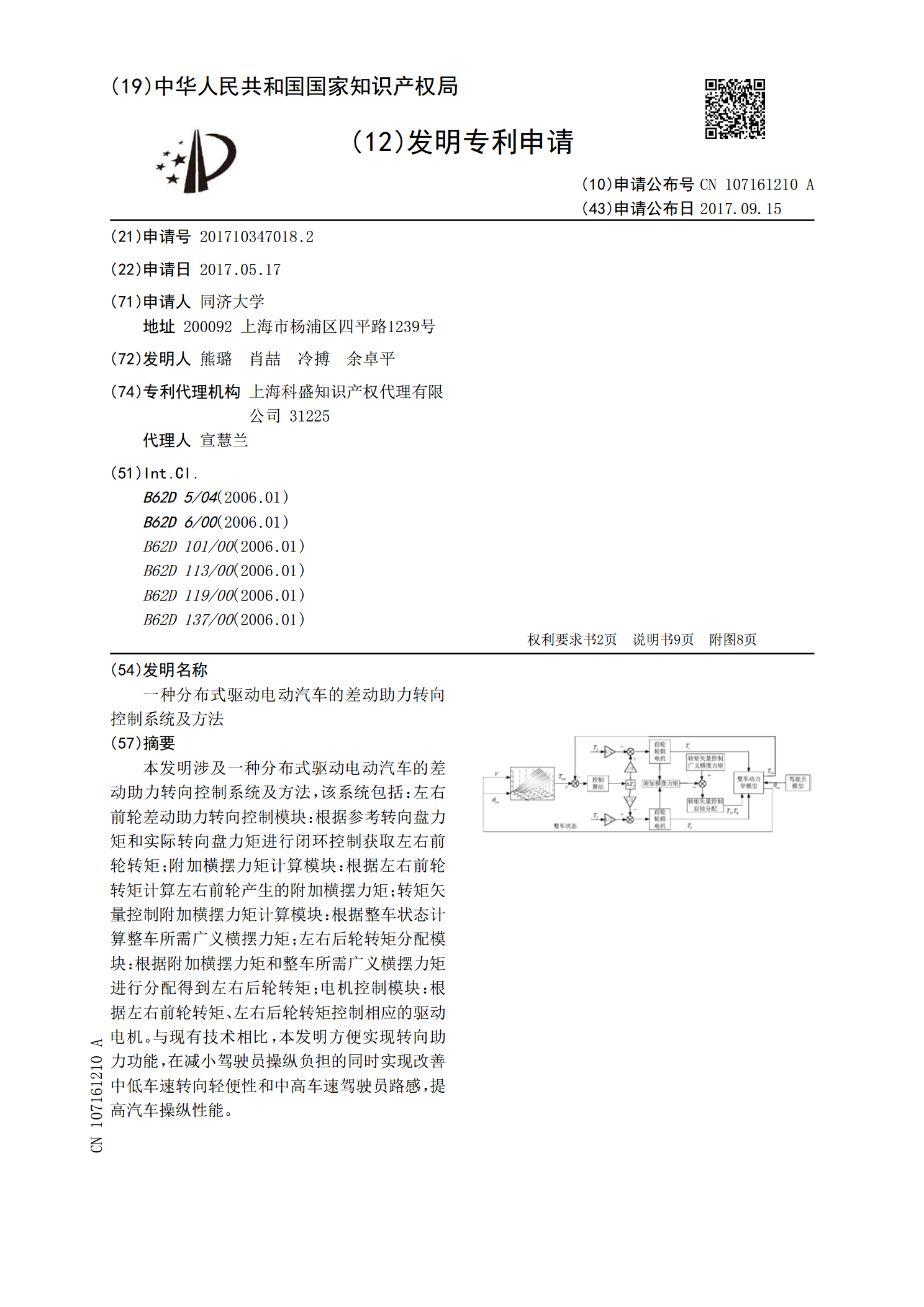
本发明涉及一种分布式驱动电动汽车的差动助力转向控制系统及方法,该系统包括:左右前轮差动助力转向控制模块:根据参考转向盘力矩和实际转向盘力矩进行闭环控制获取左右前轮转矩;附加横摆力矩计算模块:根据左右前轮转矩计算左右前轮产生的附加横摆力矩;转矩矢量控制附加横摆力矩计算模块:根据整车状态计算整车所需广义横摆力矩;左右后轮转矩分配模块:根据附加横摆力矩和整车所需广义横摆力矩进行分配得到左右后轮转矩;电机控制模块:根据左右前轮转矩、左右后轮转矩控制相应的驱动电机。与现有技术相比,本发明方便实现转向助力功能,在减小

用于分布式驱动独立转向电动汽车的悬架及转向系统.pdf
本发明公开了一种用于分布式驱动独立转向电动汽车的悬架及转向系统,通过安装支架固定在车身上,包括车轮、轮毂电机、车轮支架、制动器、转向系统以及双横臂悬架系统,所述转向系统安装于车身的安装支架之上,所述车轮支架与所述转向系统输出端相联,所述双横臂悬架系统安装于车轮支架上,所述双横臂悬架系统与所述转向系统之间的运动无干涉。本发明所提供的装置使单个车轮具有大转向角能力的同时,集成了带有横向稳定器的双横臂悬架系统,从而改善了轮胎接地状态、提高附着极限、减少了轮胎磨损,增大了汽车侧倾刚度,从而改善了操纵稳定性,且整个
一种用于四轮独立驱动电动汽车的电动助力转向系统与差动助力系统的联合控制方法.pdf
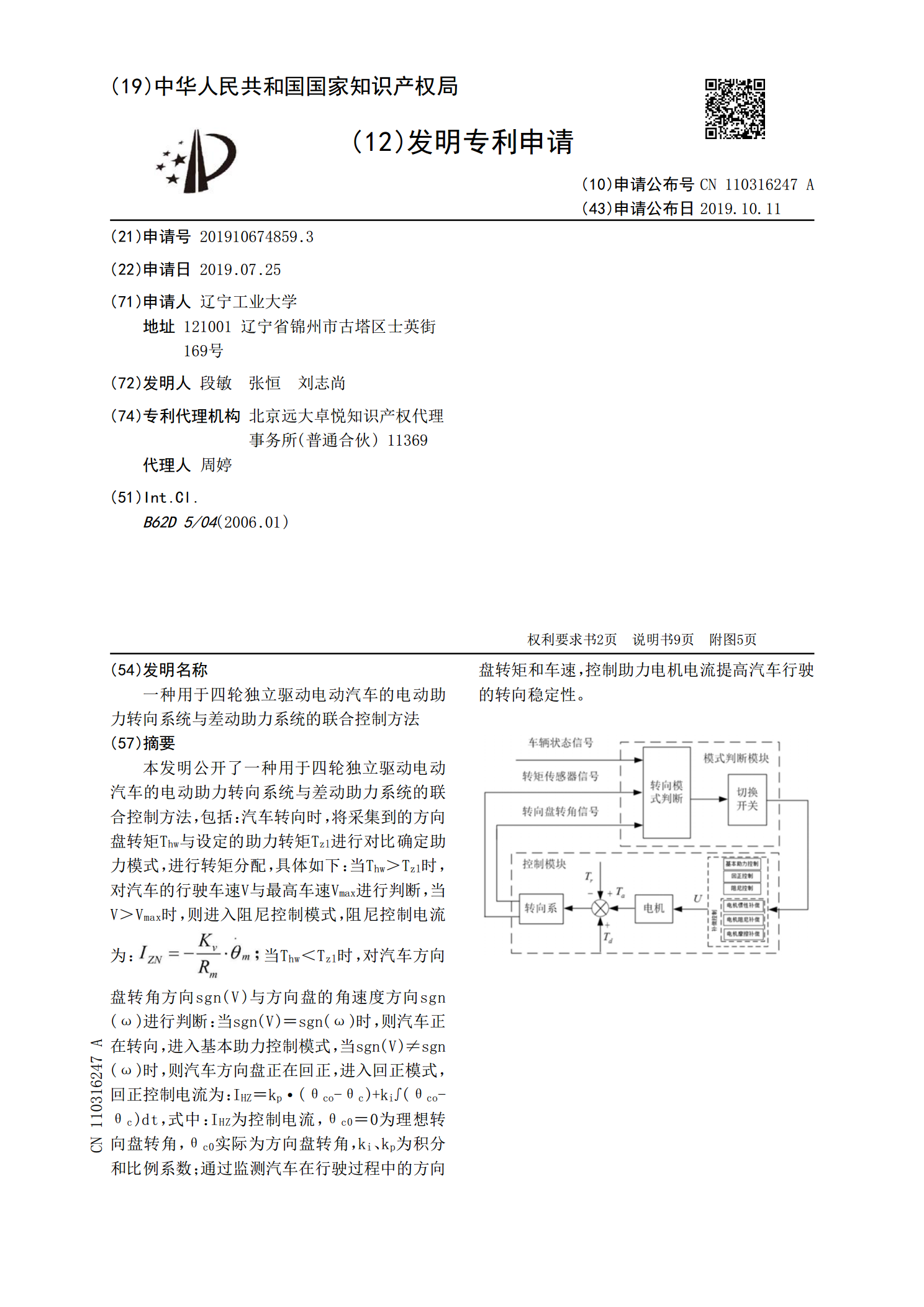
本发明公开了一种用于四轮独立驱动电动汽车的电动助力转向系统与差动助力系统的联合控制方法,包括:汽车转向时,将采集到的方向盘转矩T