
一种用于四轮独立驱动电动汽车的电动助力转向系统与差动助力系统的联合控制方法.pdf

羽沫****魔王

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于四轮独立驱动电动汽车的电动助力转向系统与差动助力系统的联合控制方法.pdf
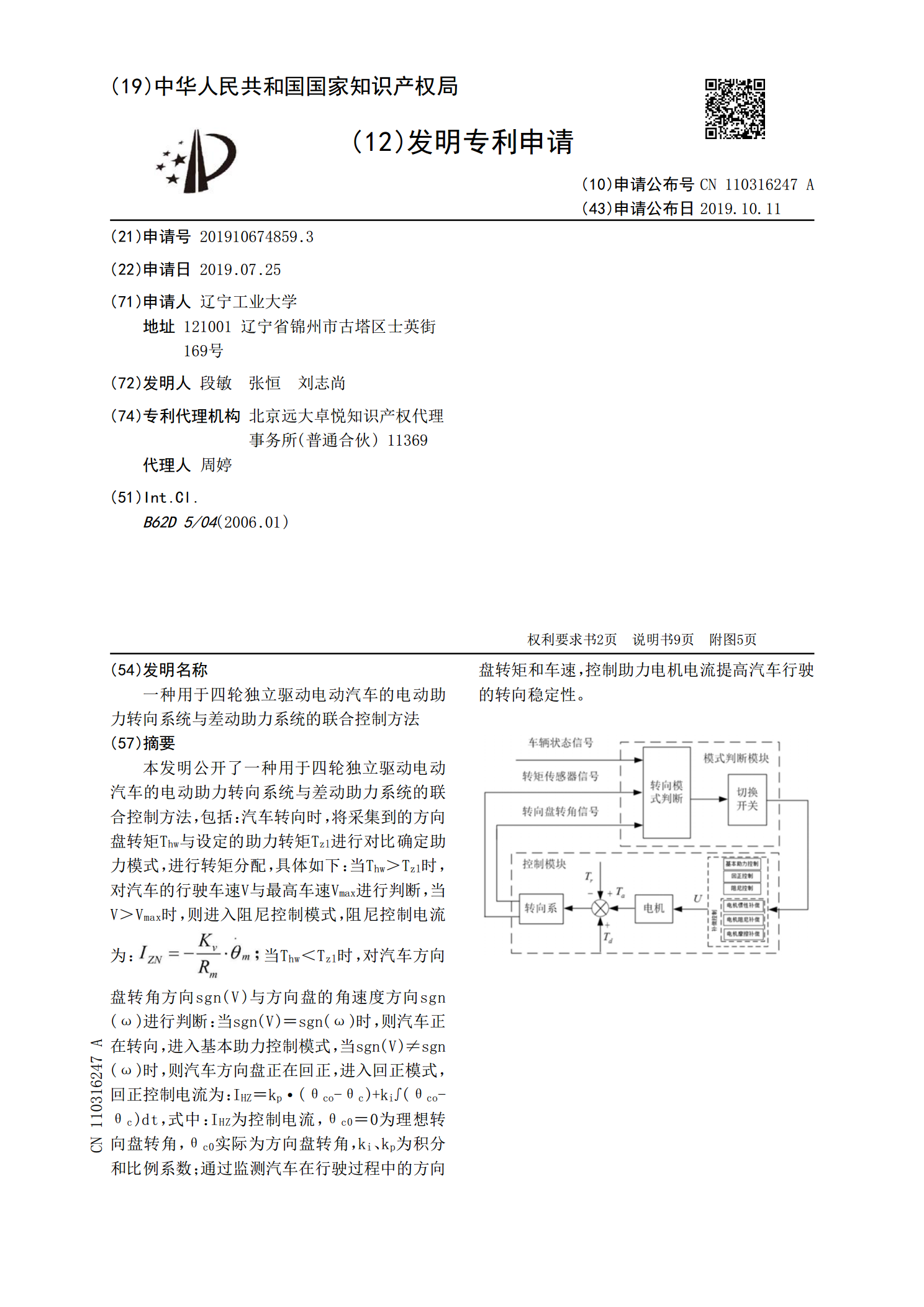
本发明公开了一种用于四轮独立驱动电动汽车的电动助力转向系统与差动助力系统的联合控制方法,包括:汽车转向时,将采集到的方向盘转矩T
一种分布式驱动电动汽车的差动助力转向控制系统及方法.pdf
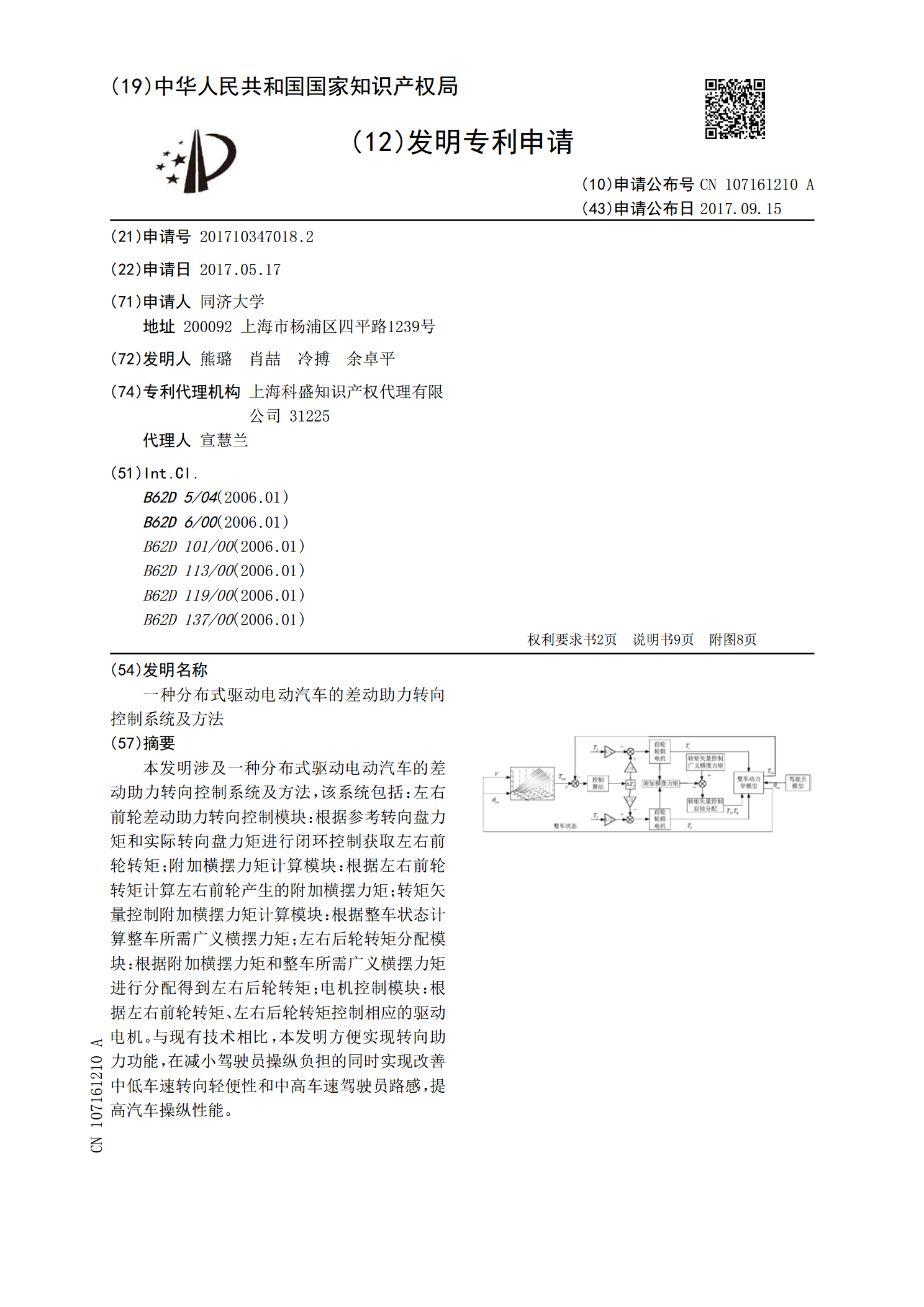
本发明涉及一种分布式驱动电动汽车的差动助力转向控制系统及方法,该系统包括:左右前轮差动助力转向控制模块:根据参考转向盘力矩和实际转向盘力矩进行闭环控制获取左右前轮转矩;附加横摆力矩计算模块:根据左右前轮转矩计算左右前轮产生的附加横摆力矩;转矩矢量控制附加横摆力矩计算模块:根据整车状态计算整车所需广义横摆力矩;左右后轮转矩分配模块:根据附加横摆力矩和整车所需广义横摆力矩进行分配得到左右后轮转矩;电机控制模块:根据左右前轮转矩、左右后轮转矩控制相应的驱动电机。与现有技术相比,本发明方便实现转向助力功能,在减小
四轮驱动电动汽车差动助力转向系统联合仿真与试验[1].pdf
电动汽车电动助力转向系统及其转向助力方法.pdf
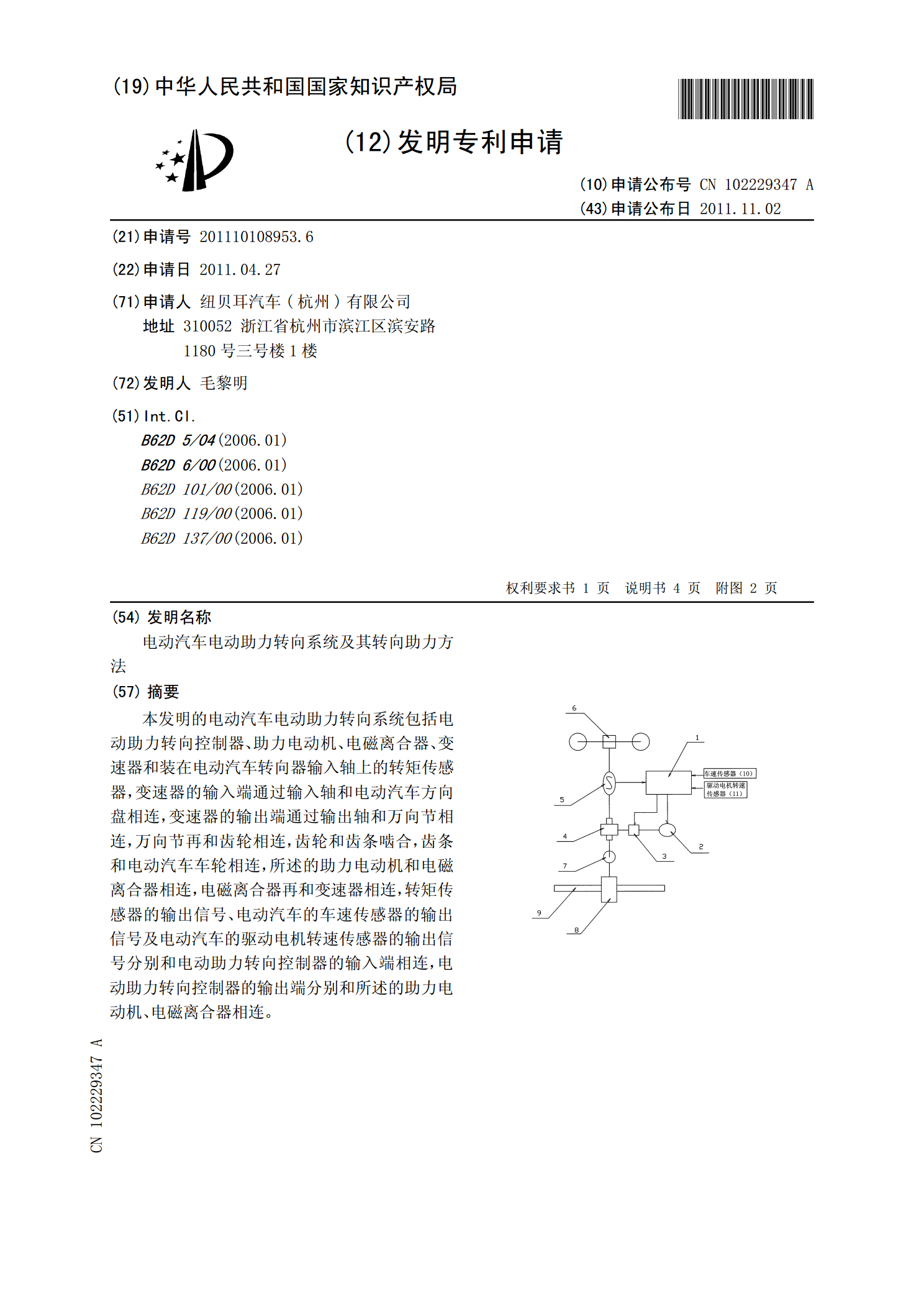
本发明的电动汽车电动助力转向系统包括电动助力转向控制器、助力电动机、电磁离合器、变速器和装在电动汽车转向器输入轴上的转矩传感器,变速器的输入端通过输入轴和电动汽车方向盘相连,变速器的输出端通过输出轴和万向节相连,万向节再和齿轮相连,齿轮和齿条啮合,齿条和电动汽车车轮相连,所述的助力电动机和电磁离合器相连,电磁离合器再和变速器相连,转矩传感器的输出信号、电动汽车的车速传感器的输出信号及电动汽车的驱动电机转速传感器的输出信号分别和电动助力转向控制器的输入端相连,电动助力转向控制器的输出端分别和所述的助力电动机

用于电动汽车的电动助力转向控制系统、装置及其方法.pdf
本发明涉及用于电动汽车的电动助力转向控制系统、装置及其方法,转向控制系统包括转向盘、输入轴、转矩转角传感器、助力电机、减速机构、输出轴、转向器、转向传动机构和电动助力转向EPS系统控制装置,转向盘、输入轴、转矩转角传感器、减速机构、输出轴、转向器和转向传动机构依次机械联接,助力电机通过传动轴与减速机构联接,EPS控制装置通过电线与助力电机、转矩转角传感器、车速传感器和电池通过电线联接,EPS控制装置还与整车控制装置通过CAN总线相连。本发明电动汽车EPS以档位信号为触发信号,只有在电动汽车挂入前进挡或者倒