
一种分布式驱动电动汽车的差动助力转向控制系统及方法.pdf

冷霜****魔王


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种分布式驱动电动汽车的差动助力转向控制系统及方法.pdf
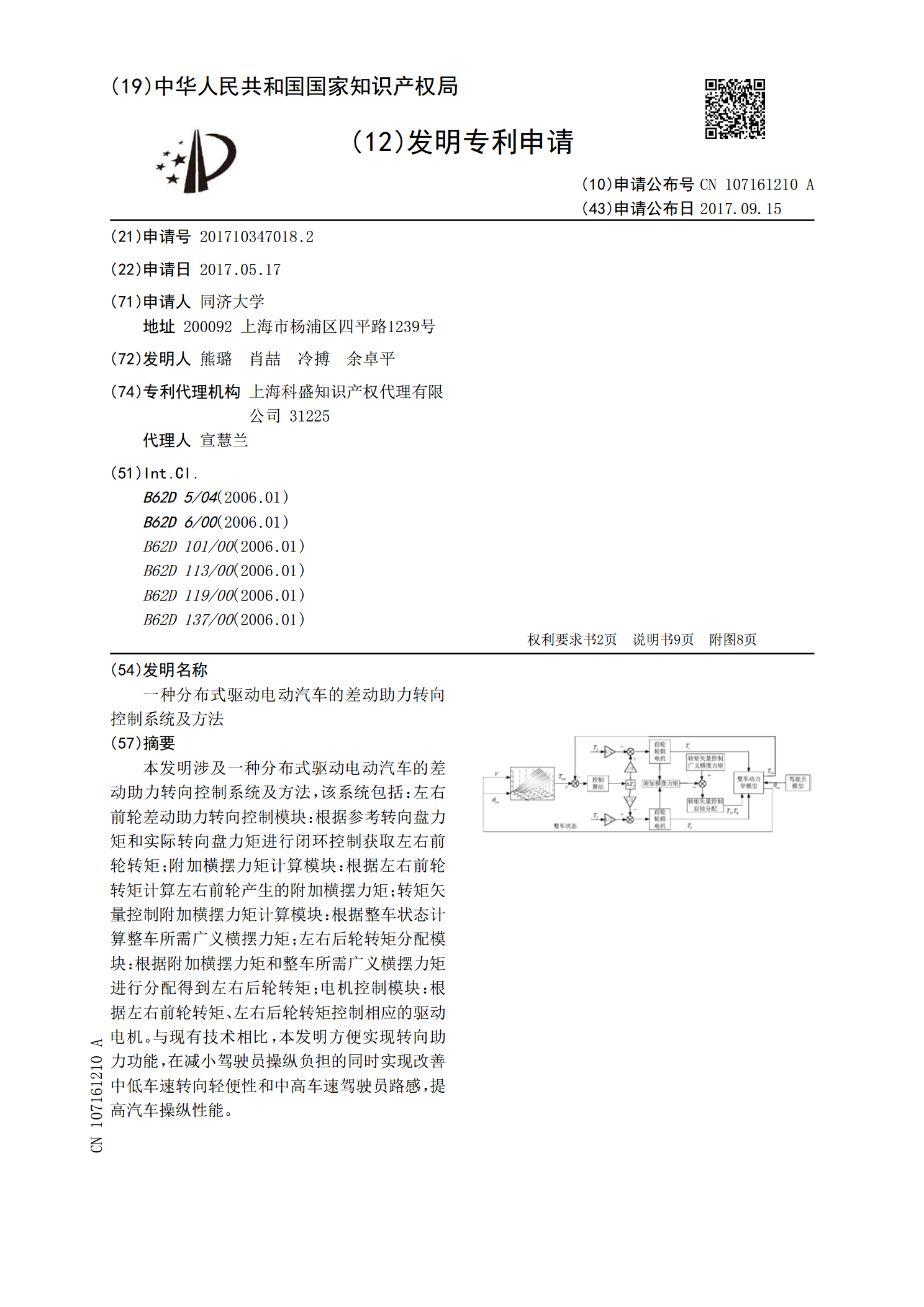
本发明涉及一种分布式驱动电动汽车的差动助力转向控制系统及方法,该系统包括:左右前轮差动助力转向控制模块:根据参考转向盘力矩和实际转向盘力矩进行闭环控制获取左右前轮转矩;附加横摆力矩计算模块:根据左右前轮转矩计算左右前轮产生的附加横摆力矩;转矩矢量控制附加横摆力矩计算模块:根据整车状态计算整车所需广义横摆力矩;左右后轮转矩分配模块:根据附加横摆力矩和整车所需广义横摆力矩进行分配得到左右后轮转矩;电机控制模块:根据左右前轮转矩、左右后轮转矩控制相应的驱动电机。与现有技术相比,本发明方便实现转向助力功能,在减小

一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法.pdf
本发明公开了一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法,包括以下步骤:S1、提取横摆角速度偏差和实际质心侧偏角组成特征状态;S2、基于可拓理论,计算出不同集合状态下的可拓协调控制的关联函数;S3、根据上述关联函数确定关联函数在不同集合状态下对应的差动助力矩权重系数以及横摆力矩权重系数;S4、建立差动助力转向控制器并结合差动助力矩权重系数得到差动助力矩;S5、建立横摆力矩控制器并结合横摆力矩权重系数得到横摆力矩;S6、根据实际车速信息并通过PID控制获取达到目标车速所需的总驱动转矩;S7、对差动助力
一种用于分布式驱动电动汽车的线控差动转向系统及方法.pdf
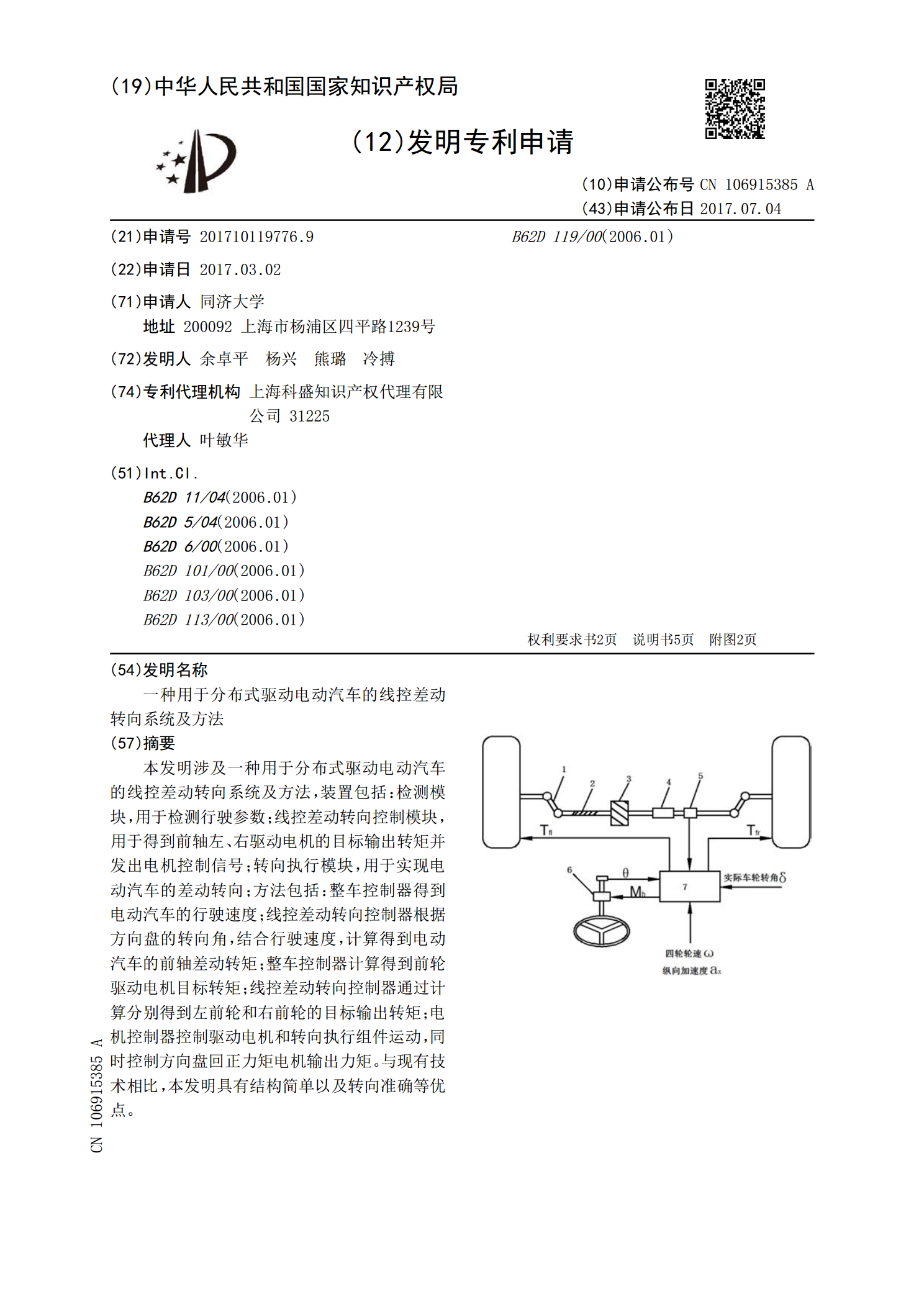
本发明涉及一种用于分布式驱动电动汽车的线控差动转向系统及方法,装置包括:检测模块,用于检测行驶参数;线控差动转向控制模块,用于得到前轴左、右驱动电机的目标输出转矩并发出电机控制信号;转向执行模块,用于实现电动汽车的差动转向;方法包括:整车控制器得到电动汽车的行驶速度;线控差动转向控制器根据方向盘的转向角,结合行驶速度,计算得到电动汽车的前轴差动转矩;整车控制器计算得到前轮驱动电机目标转矩;线控差动转向控制器通过计算分别得到左前轮和右前轮的目标输出转矩;电机控制器控制驱动电机和转向执行组件运动,同时控制方向
一种用于四轮独立驱动电动汽车的电动助力转向系统与差动助力系统的联合控制方法.pdf
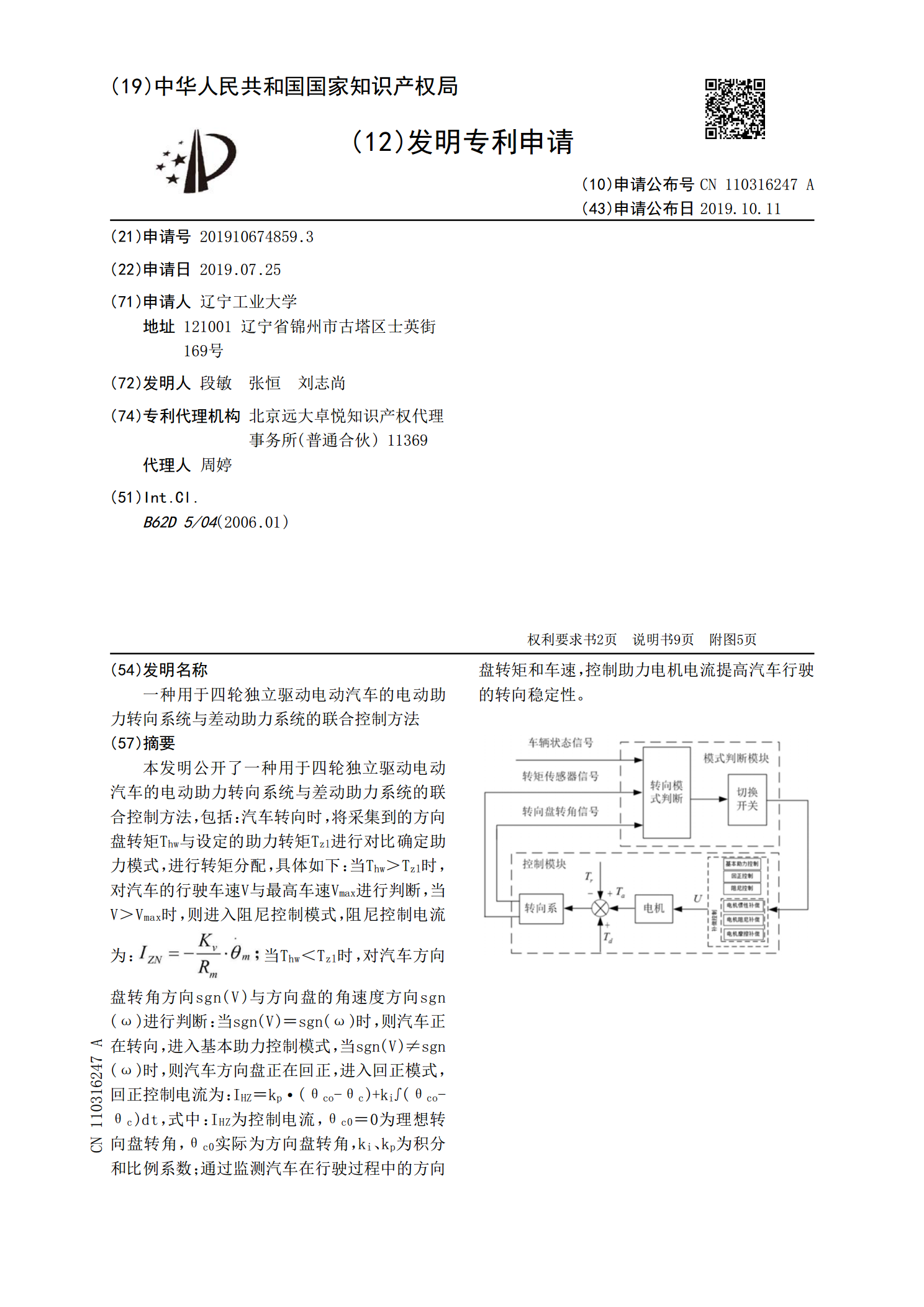
本发明公开了一种用于四轮独立驱动电动汽车的电动助力转向系统与差动助力系统的联合控制方法,包括:汽车转向时,将采集到的方向盘转矩T
四轮驱动电动汽车差动助力转向系统联合仿真与试验[1].pdf