
一种全向轮及全向轮机构.pdf

悠柔****找我


1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全向轮及全向轮机构.pdf
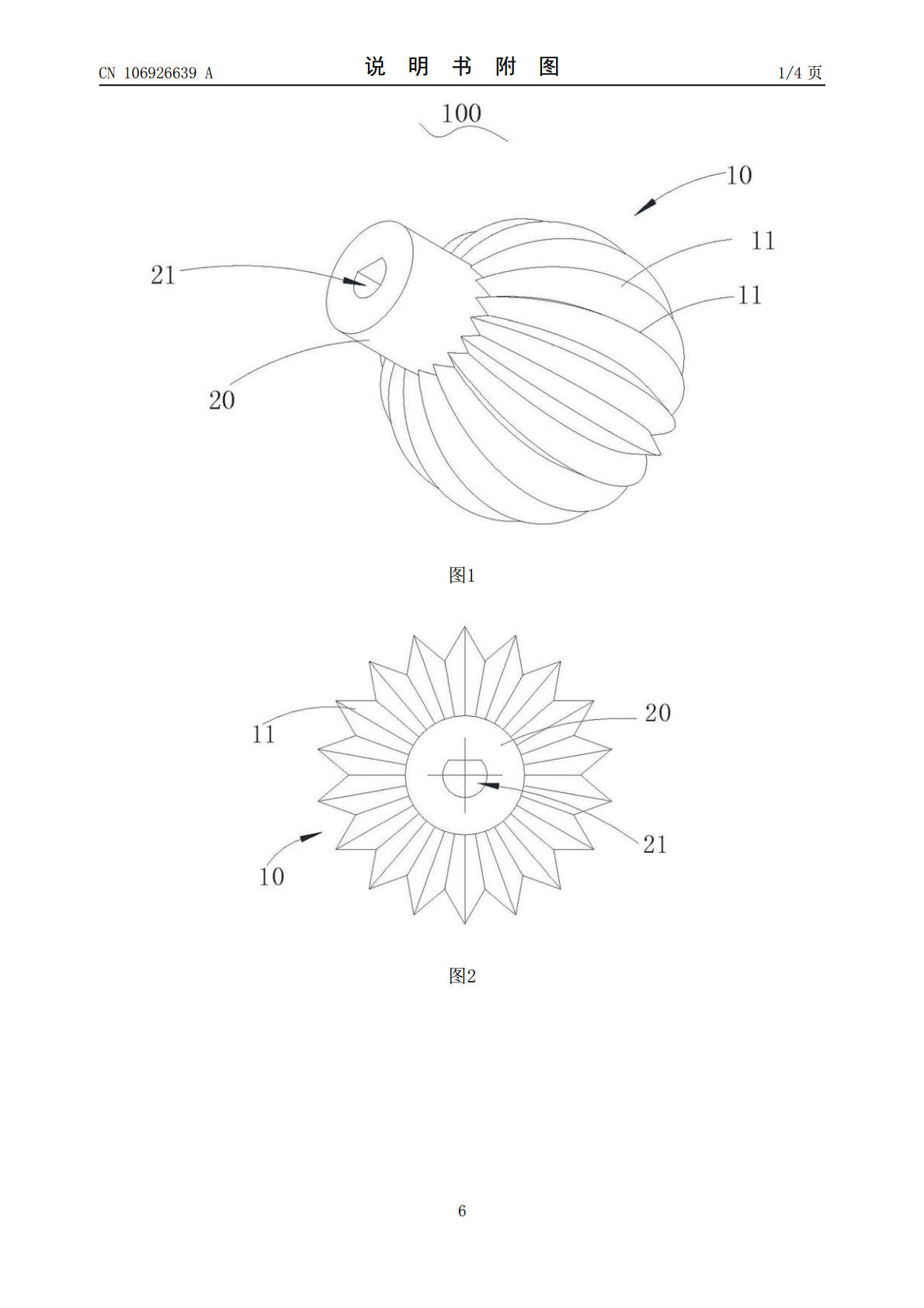
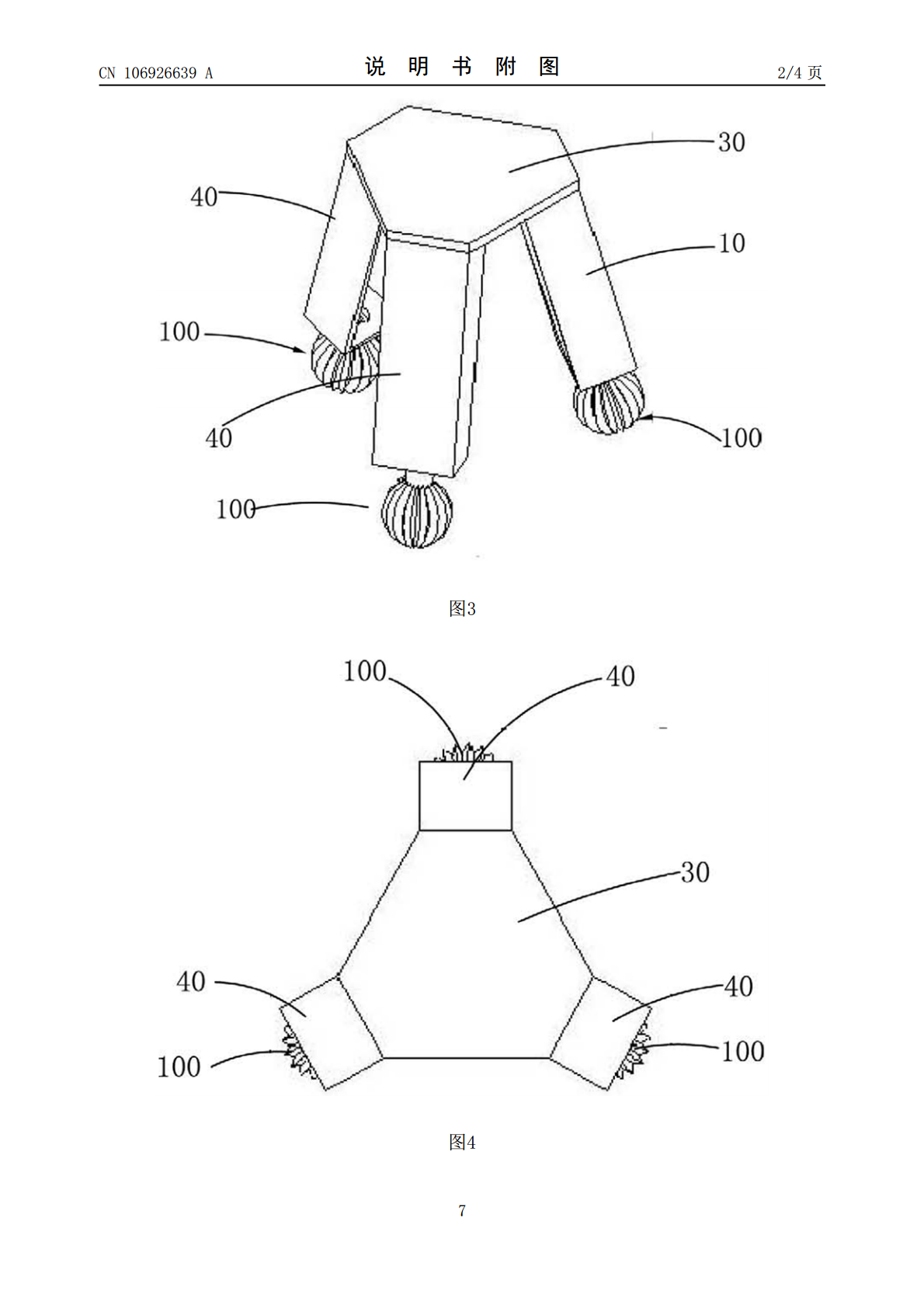
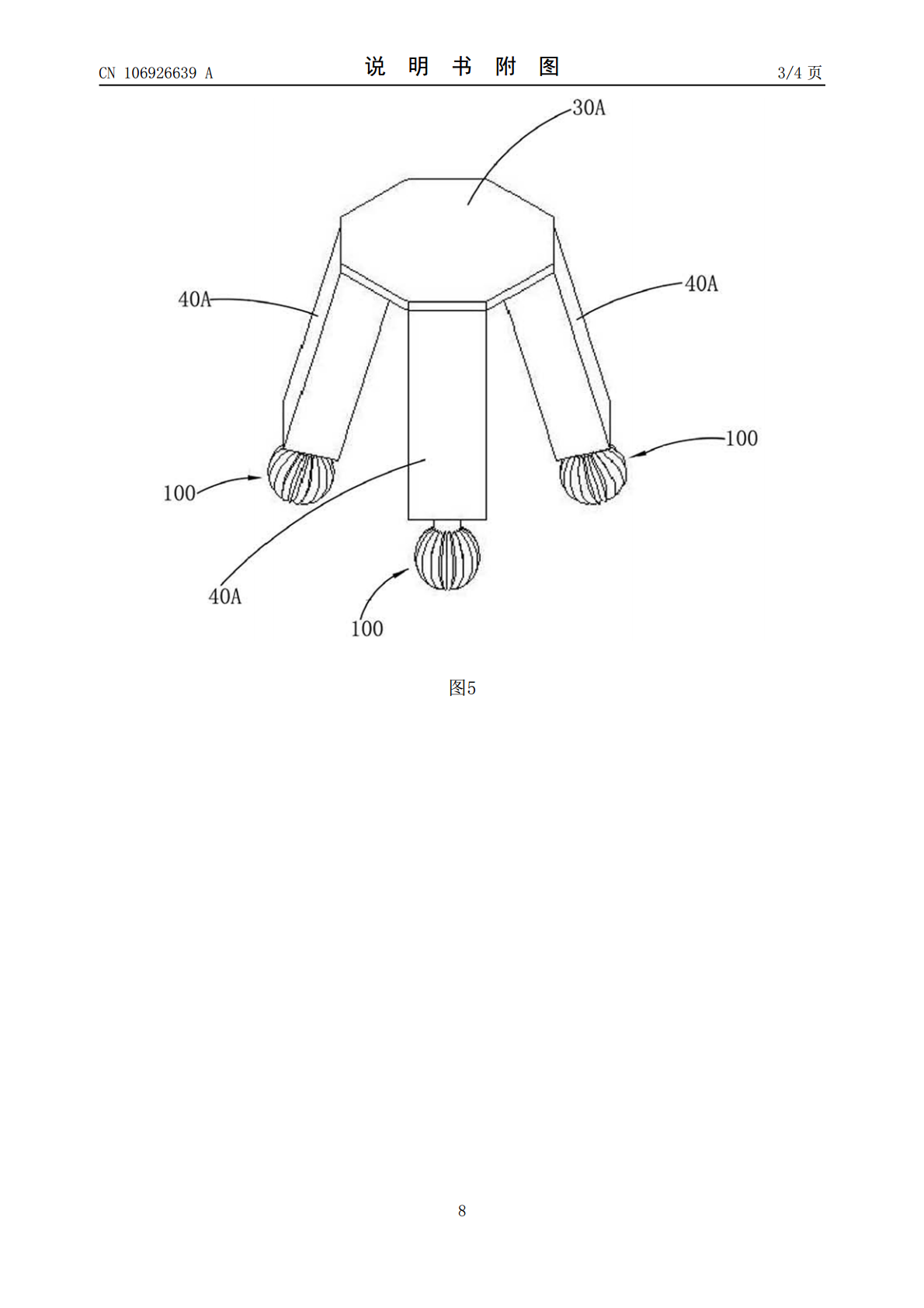
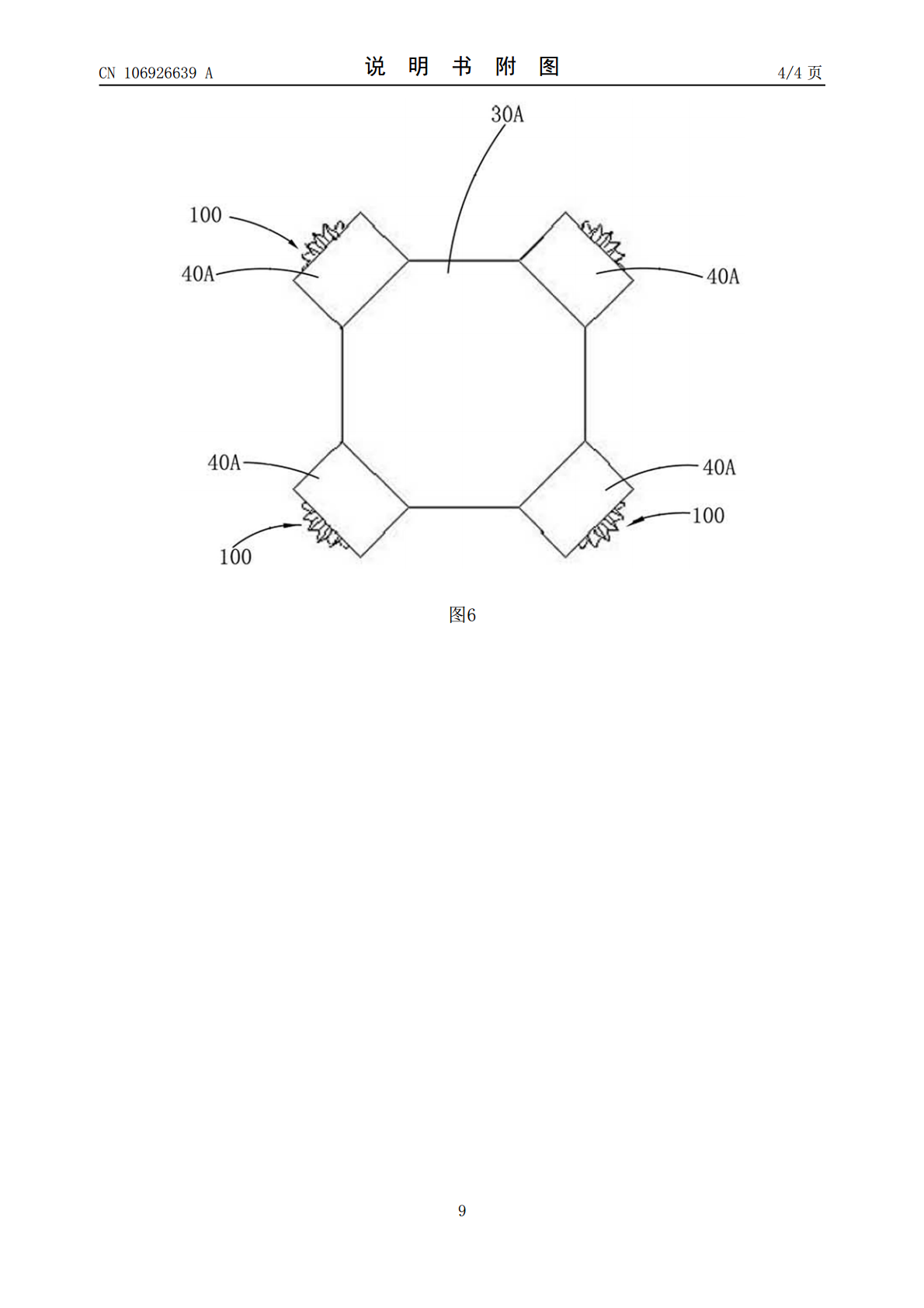
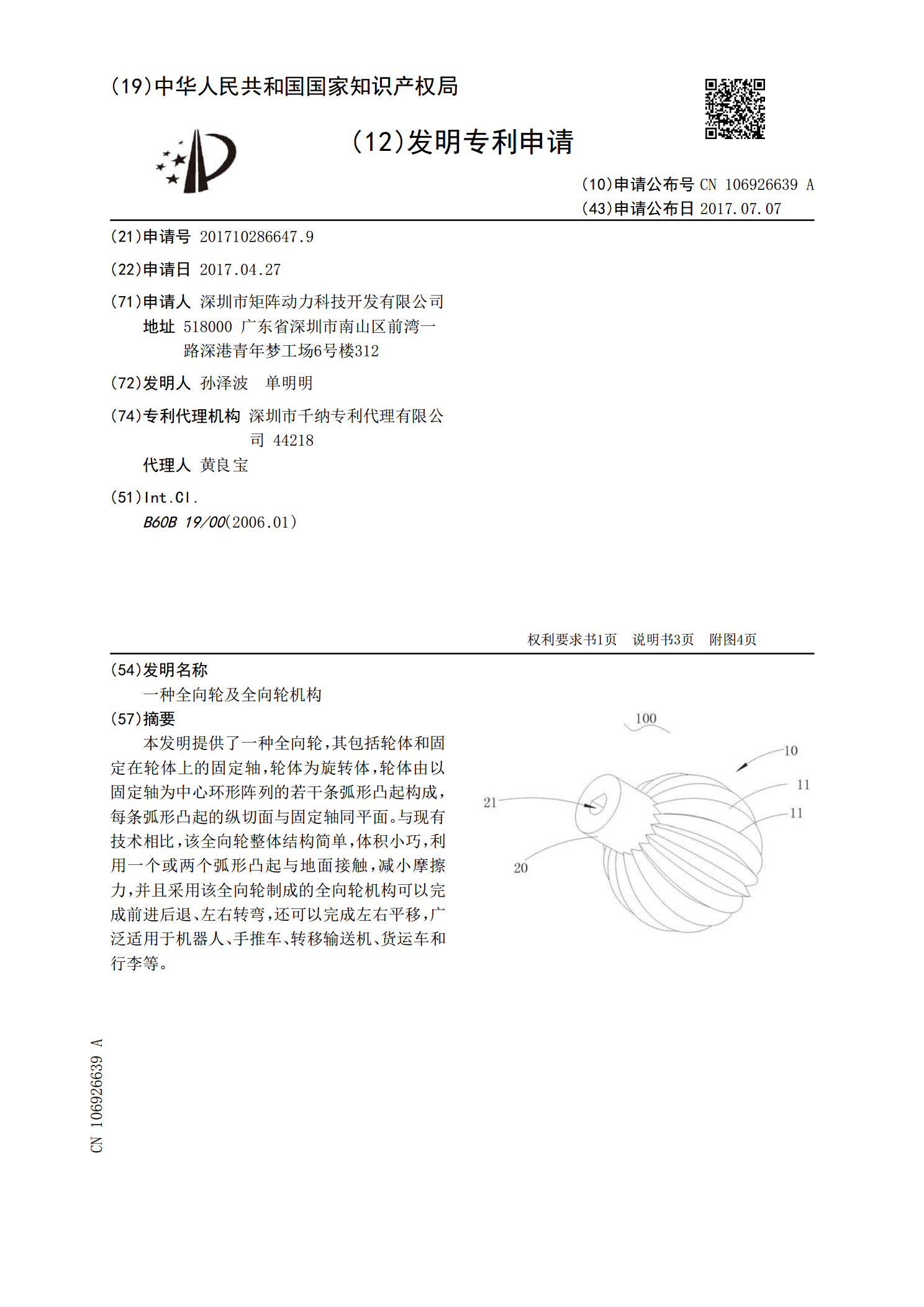
本发明提供了一种全向轮,其包括轮体和固定在轮体上的固定轴,轮体为旋转体,轮体由以固定轴为中心环形阵列的若干条弧形凸起构成,每条弧形凸起的纵切面与固定轴同平面。与现有技术相比,该全向轮整体结构简单,体积小巧,利用一个或两个弧形凸起与地面接触,减小摩擦力,并且采用该全向轮制成的全向轮机构可以完成前进后退、左右转弯,还可以完成左右平移,广泛适用于机器人、手推车、转移输送机、货运车和行李等。
一种全向轮、全向轮组及使用该全向轮或全向轮组的载物小车.pdf
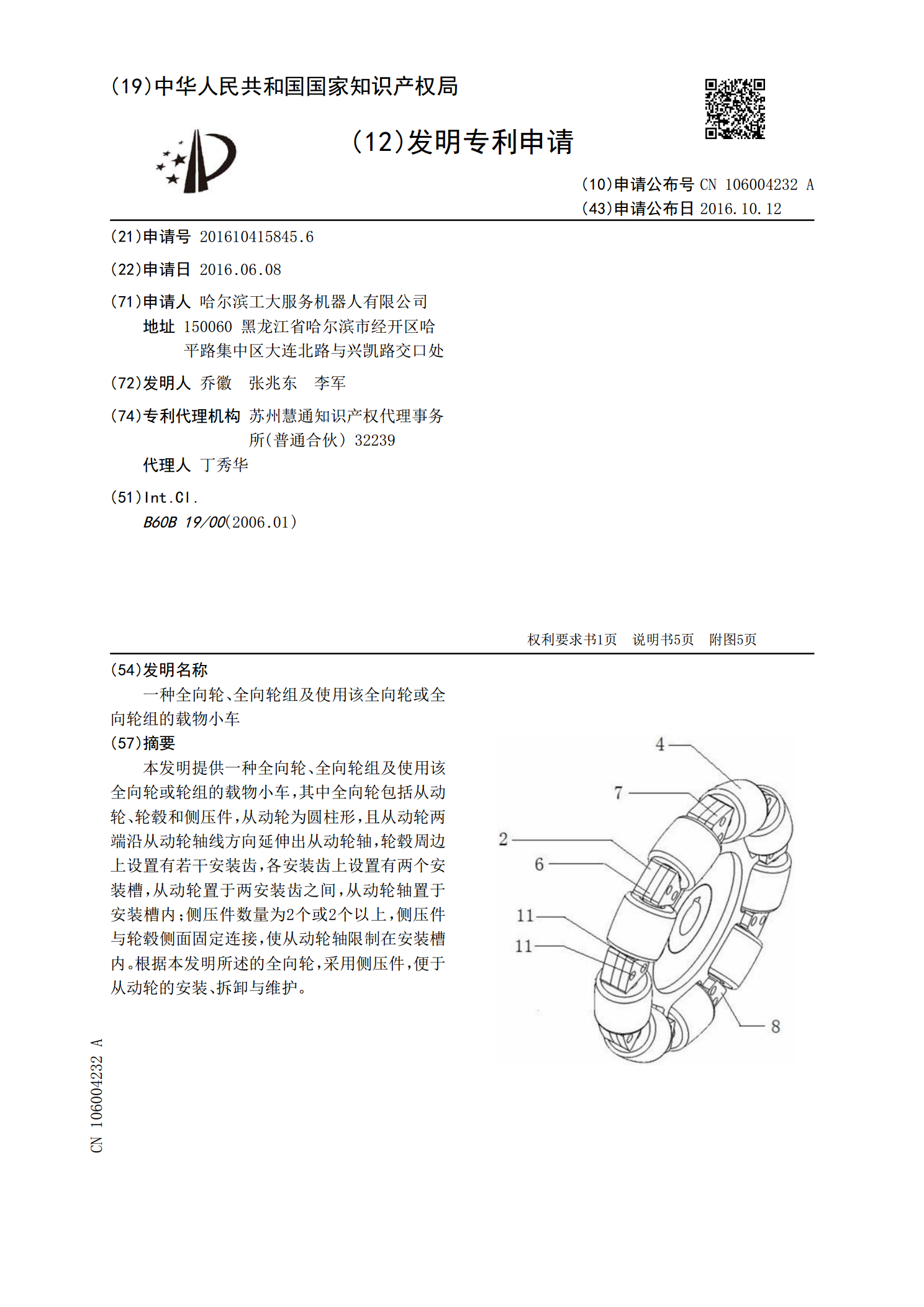
本发明提供一种全向轮、全向轮组及使用该全向轮或轮组的载物小车,其中全向轮包括从动轮、轮毂和侧压件,从动轮为圆柱形,且从动轮两端沿从动轮轴线方向延伸出从动轮轴,轮毂周边上设置有若干安装齿,各安装齿上设置有两个安装槽,从动轮置于两安装齿之间,从动轮轴置于安装槽内;侧压件数量为2个或2个以上,侧压件与轮毂侧面固定连接,使从动轮轴限制在安装槽内。根据本发明所述的全向轮,采用侧压件,便于从动轮的安装、拆卸与维护。

一种全向轮、全向轮组件及可移动装置.pdf
本发明公开了一种全向轮、全向轮组件及可移动装置,其中全向轮包括轮毂和多个从动轮,轮毂的外周上设置多个安装齿,相邻的两个安装齿之间形成容纳从动轮的安装槽,各安装齿上均设置两个固定槽,固定槽的一端贯穿轮毂端面形成插入口,从动轮呈圆柱状,从动轮套接在中轴上,中轴两端伸出到从动轮外部,中轴两端置于两侧的固定槽内,还包括固定板,固定板盖合插入口并固定在安装齿上,使中轴限制在固定槽内。本发明所述的全向轮通过固定板将从动轮的中轴固定在轮毂的固定槽内,安装方式简单,安装后便于维护;限位结构有效防止固定板的移动,使全向轮的
全向轮.pdf
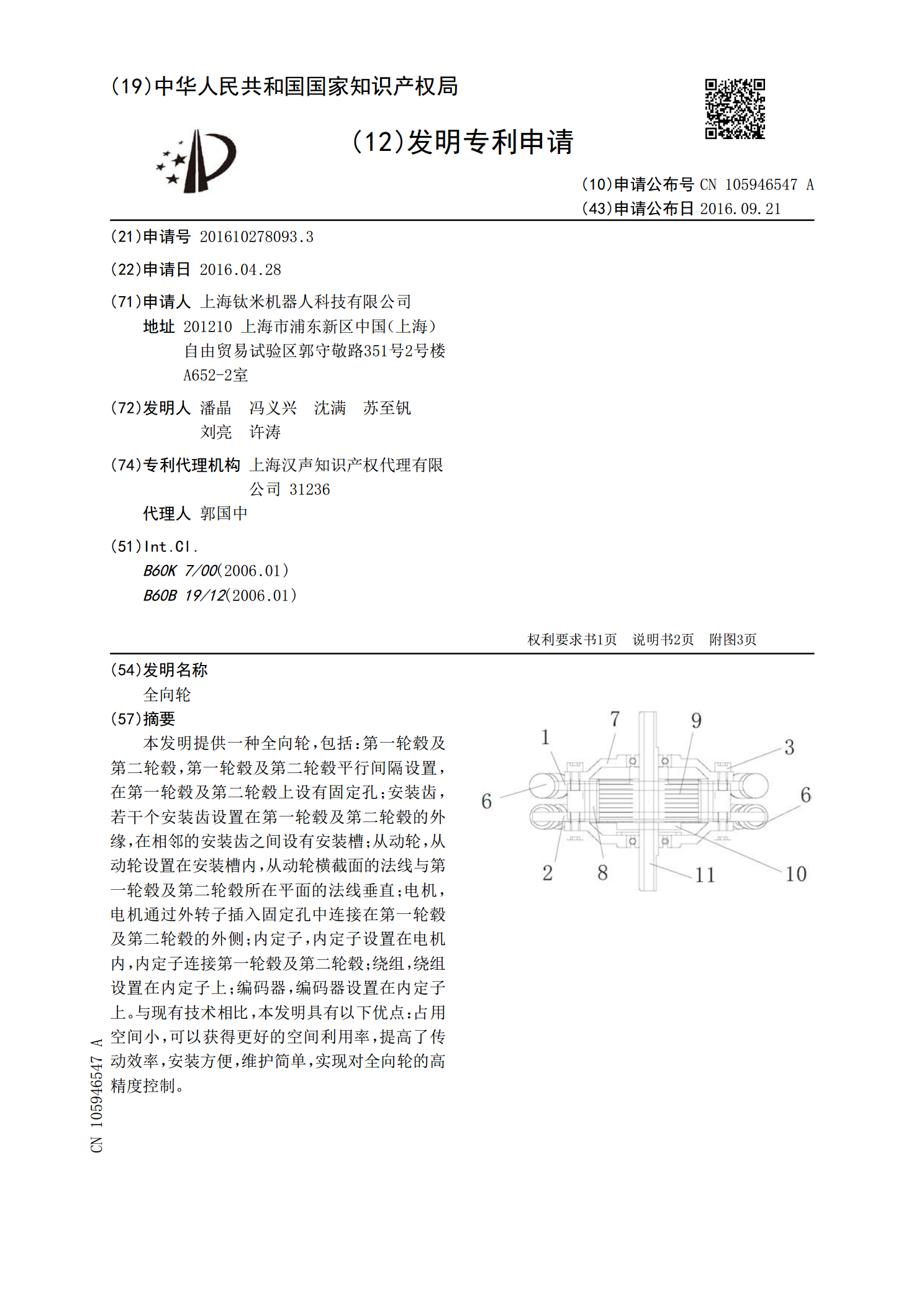
本发明提供一种全向轮,包括:第一轮毂及第二轮毂,第一轮毂及第二轮毂平行间隔设置,在第一轮毂及第二轮毂上设有固定孔;安装齿,若干个安装齿设置在第一轮毂及第二轮毂的外缘,在相邻的安装齿之间设有安装槽;从动轮,从动轮设置在安装槽内,从动轮横截面的法线与第一轮毂及第二轮毂所在平面的法线垂直;电机,电机通过外转子插入固定孔中连接在第一轮毂及第二轮毂的外侧;内定子,内定子设置在电机内,内定子连接第一轮毂及第二轮毂;绕组,绕组设置在内定子上;编码器,编码器设置在内定子上。与现有技术相比,本发明具有以下优点:占用空间小,
全向轮.pdf
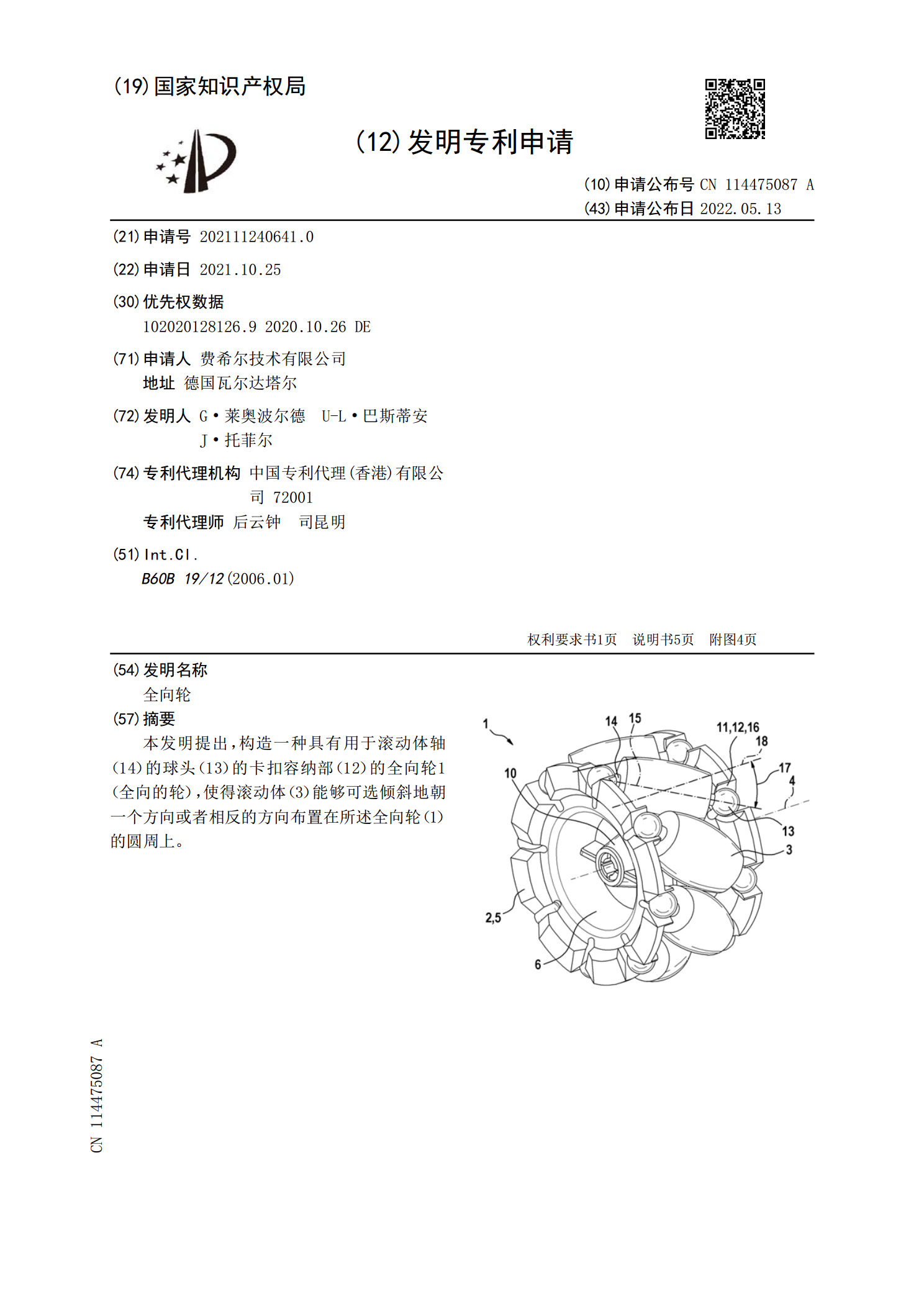
本发明提出,构造一种具有用于滚动体轴(14)的球头(13)的卡扣容纳部(12)的全向轮1(全向的轮),使得滚动体(3)能够可选倾斜地朝一个方向或者相反的方向布置在所述全向轮(1)的圆周上。