
一种双层盘式六足移动平台.pdf

书生****文章


1/9
2/9

3/9

4/9
5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双层盘式六足移动平台.pdf
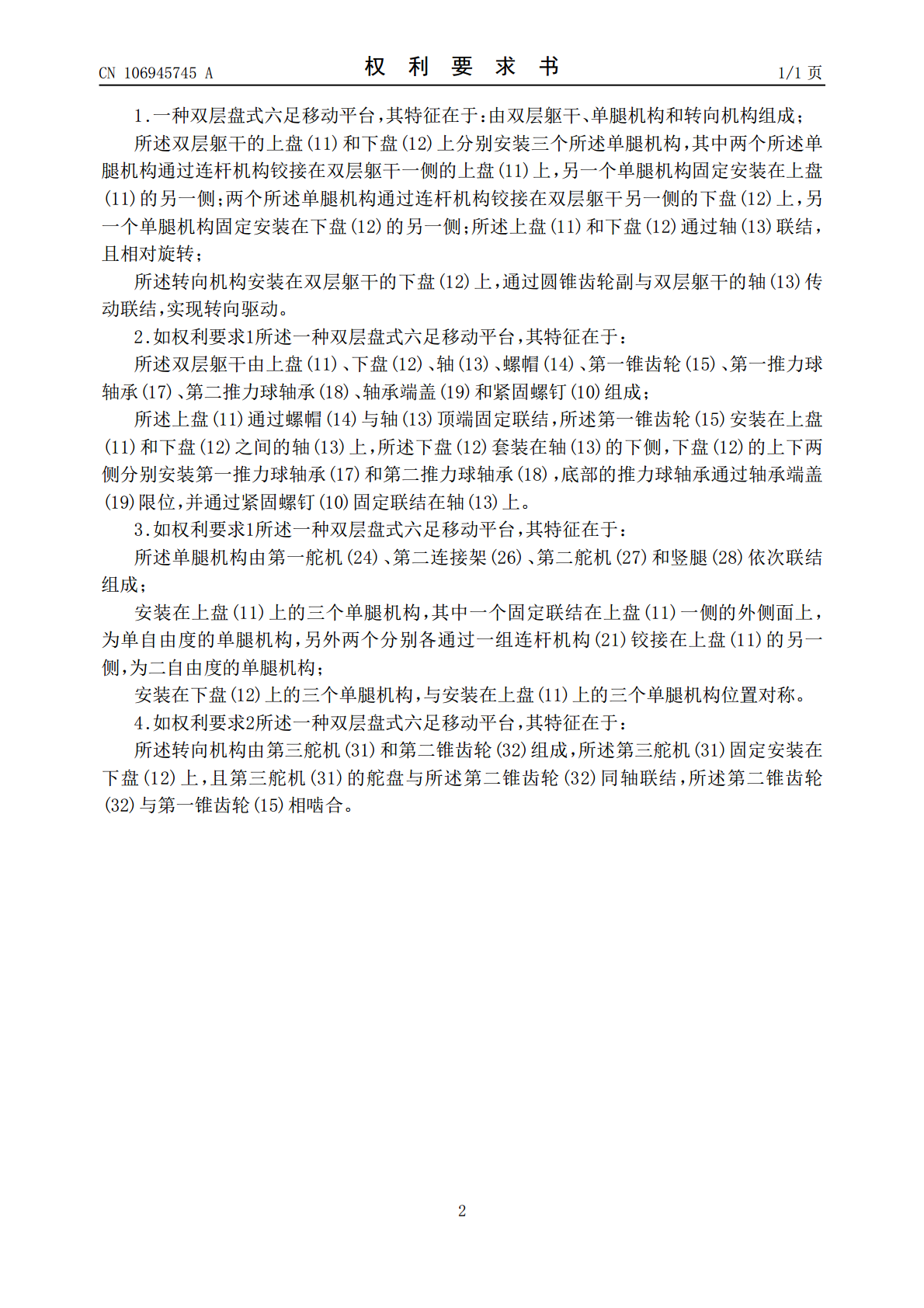
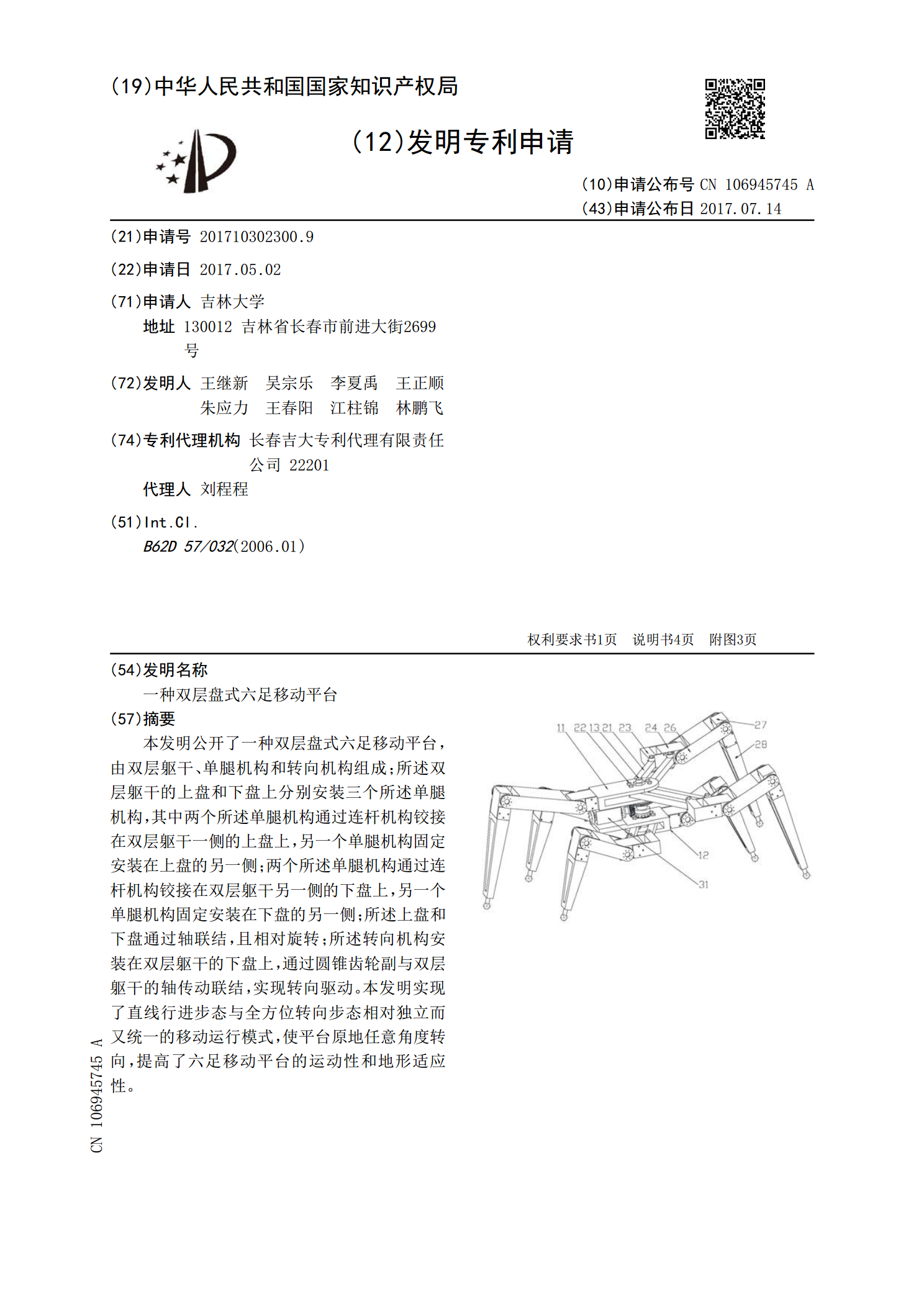
本发明公开了一种双层盘式六足移动平台,由双层躯干、单腿机构和转向机构组成;所述双层躯干的上盘和下盘上分别安装三个所述单腿机构,其中两个所述单腿机构通过连杆机构铰接在双层躯干一侧的上盘上,另一个单腿机构固定安装在上盘的另一侧;两个所述单腿机构通过连杆机构铰接在双层躯干另一侧的下盘上,另一个单腿机构固定安装在下盘的另一侧;所述上盘和下盘通过轴联结,且相对旋转;所述转向机构安装在双层躯干的下盘上,通过圆锥齿轮副与双层躯干的轴传动联结,实现转向驱动。本发明实现了直线行进步态与全方位转向步态相对独立而又统一的移动运

一种足式移动平台.pdf
本发明提供了一种足式移动平台,其特征在于,足式移动平台包括髋部、两条腿部;髋部包括髋部支撑板、设在髋部支撑板上的横轴、相对设置的两组侧摆机构;侧摆机构包括活动支架、传动轴,活动支架与横轴转动配合,传动轴转动设置在活动支架上,传动轴与横轴相互垂直;横轴上设有主动锥齿轮,传动轴上设有与主动锥齿轮啮合的从动锥齿轮;腿部包括大腿部、小腿部,大腿部通过连接板连接传动轴,大腿部中设有伸缩机构,小腿部可伸缩地连接大腿部;伸缩机构上设有用于驱动小腿部伸缩的动力部件。本发明结构简单,控制灵敏,具有较强的负载能力;驱动电机数
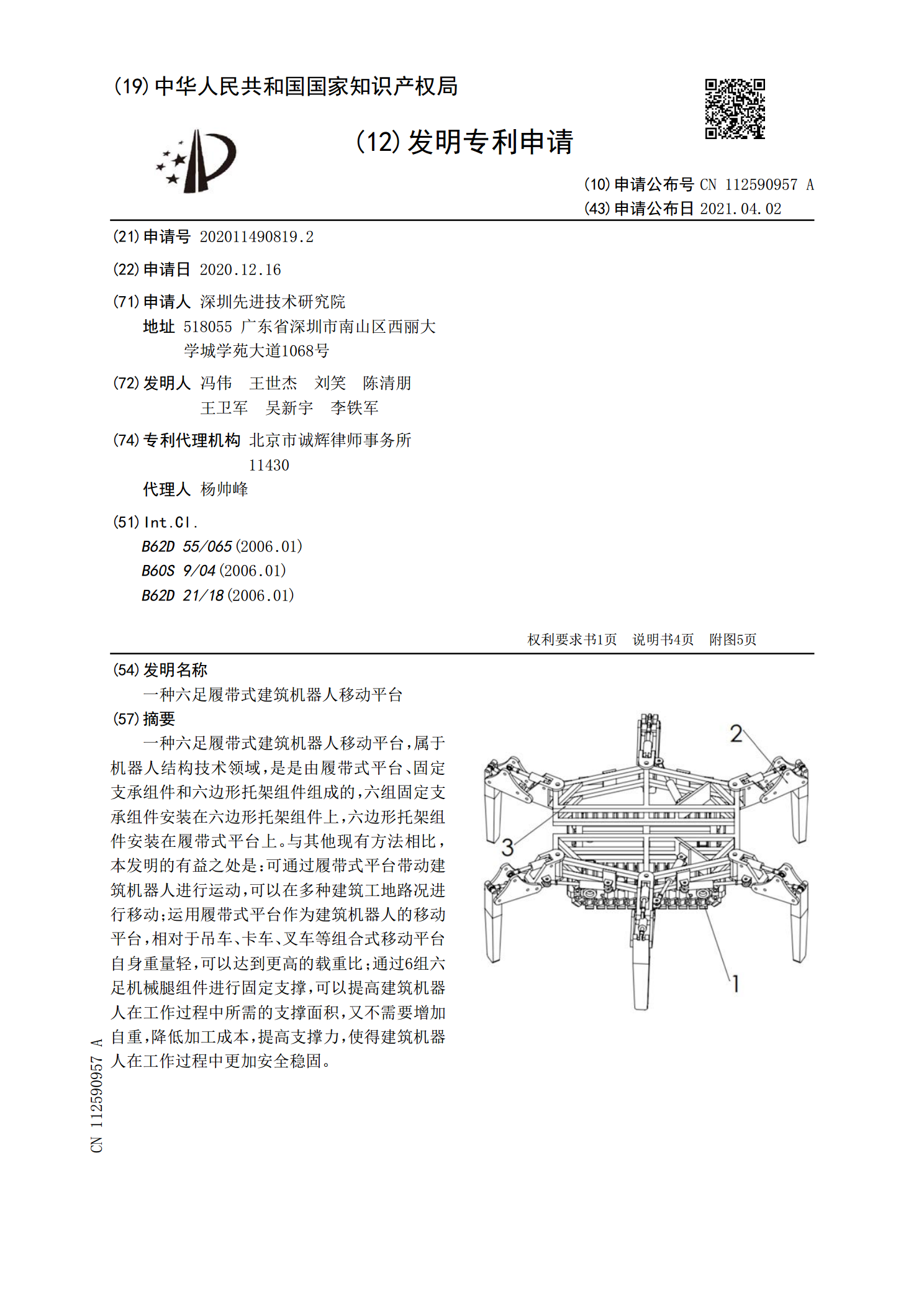
一种六足履带式建筑机器人移动平台.pdf
一种六足履带式建筑机器人移动平台,属于机器人结构技术领域,是是由履带式平台、固定支承组件和六边形托架组件组成的,六组固定支承组件安装在六边形托架组件上,六边形托架组件安装在履带式平台上。与其他现有方法相比,本发明的有益之处是:可通过履带式平台带动建筑机器人进行运动,可以在多种建筑工地路况进行移动;运用履带式平台作为建筑机器人的移动平台,相对于吊车、卡车、叉车等组合式移动平台自身重量轻,可以达到更高的载重比;通过6组六足机械腿组件进行固定支撑,可以提高建筑机器人在工作过程中所需的支撑面积,又不需要增加自重,
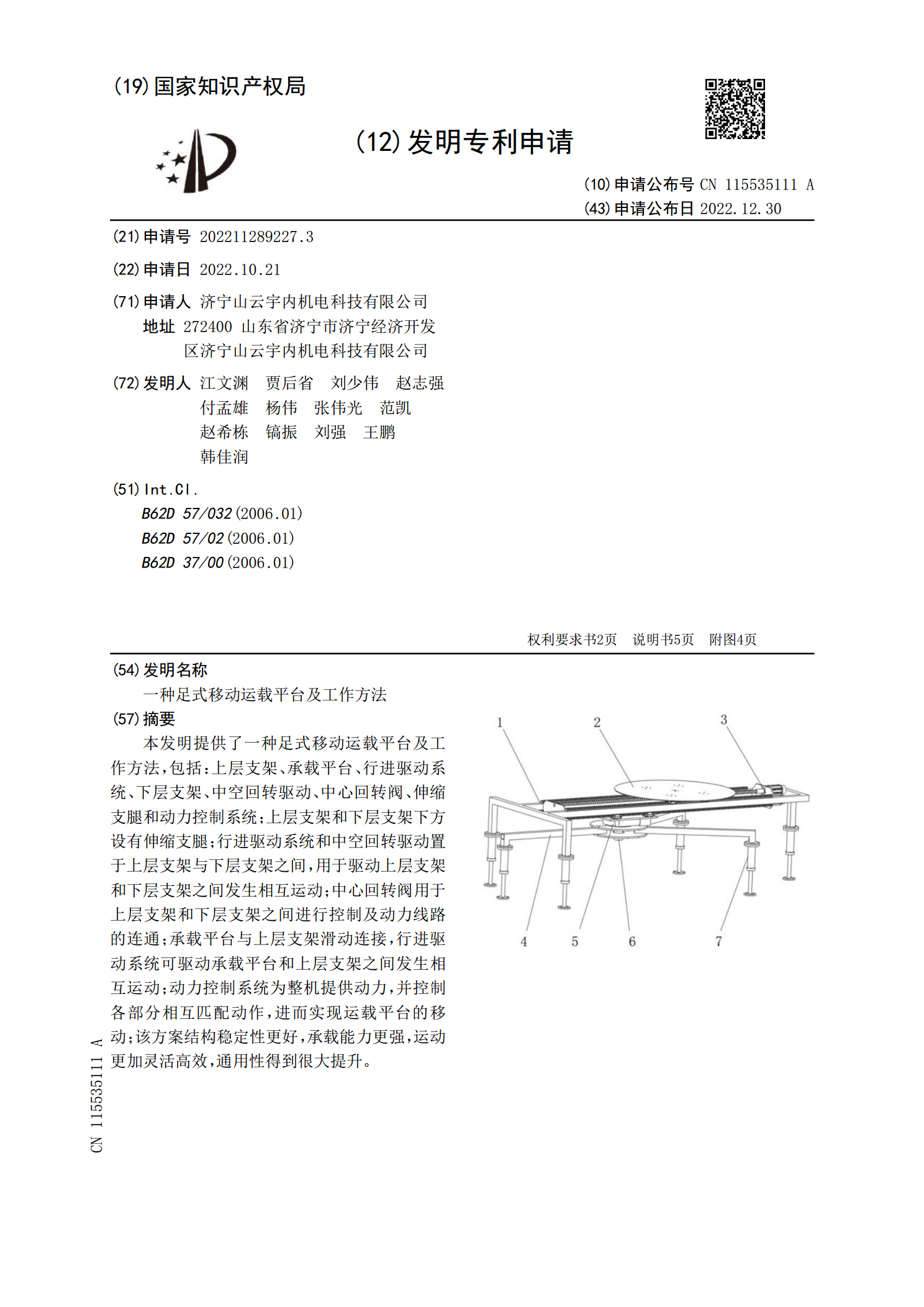
一种足式移动运载平台及工作方法.pdf
本发明提供了一种足式移动运载平台及工作方法,包括:上层支架、承载平台、行进驱动系统、下层支架、中空回转驱动、中心回转阀、伸缩支腿和动力控制系统;上层支架和下层支架下方设有伸缩支腿;行进驱动系统和中空回转驱动置于上层支架与下层支架之间,用于驱动上层支架和下层支架之间发生相互运动;中心回转阀用于上层支架和下层支架之间进行控制及动力线路的连通;承载平台与上层支架滑动连接,行进驱动系统可驱动承载平台和上层支架之间发生相互运动;动力控制系统为整机提供动力,并控制各部分相互匹配动作,进而实现运载平台的移动;该方案结构
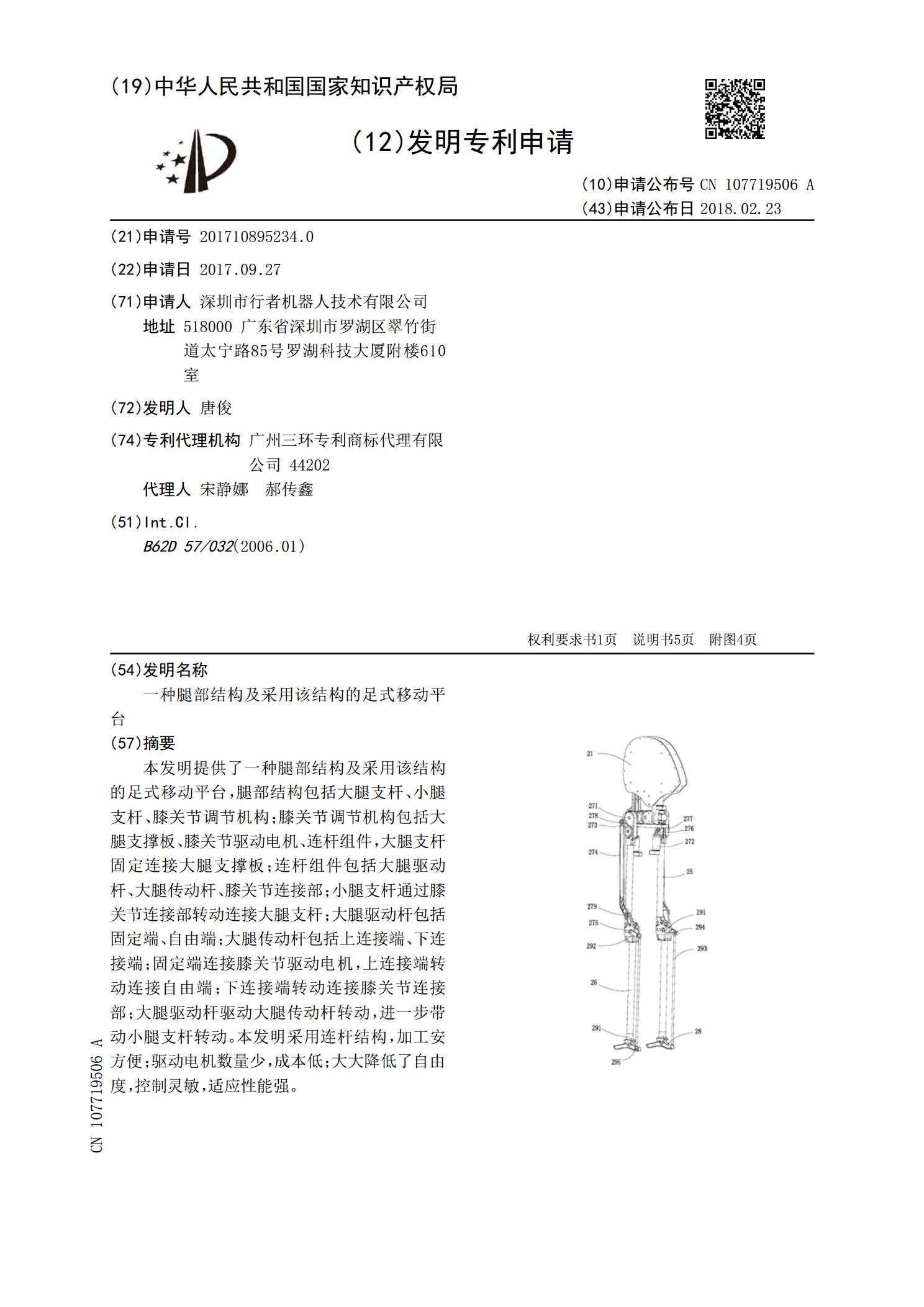
一种腿部结构及采用该结构的足式移动平台.pdf
本发明提供了一种腿部结构及采用该结构的足式移动平台,腿部结构包括大腿支杆、小腿支杆、膝关节调节机构;膝关节调节机构包括大腿支撑板、膝关节驱动电机、连杆组件,大腿支杆固定连接大腿支撑板;连杆组件包括大腿驱动杆、大腿传动杆、膝关节连接部;小腿支杆通过膝关节连接部转动连接大腿支杆;大腿驱动杆包括固定端、自由端;大腿传动杆包括上连接端、下连接端;固定端连接膝关节驱动电机,上连接端转动连接自由端;下连接端转动连接膝关节连接部;大腿驱动杆驱动大腿传动杆转动,进一步带动小腿支杆转动。本发明采用连杆结构,加工安方便;驱动