
一种螺旋推进式管道机器人.pdf

慧红****ad

1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种螺旋推进式管道机器人.pdf
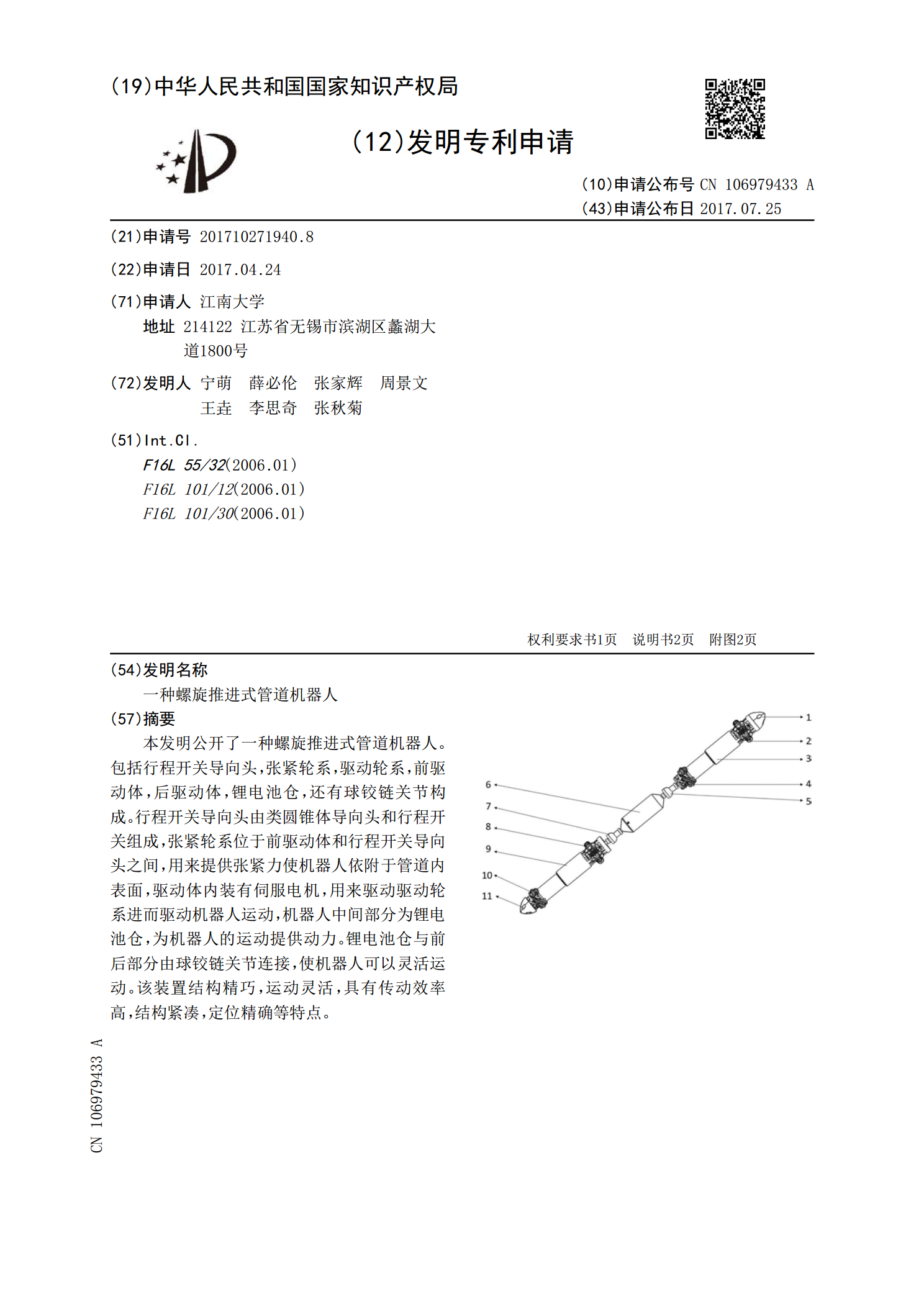
本发明公开了一种螺旋推进式管道机器人。包括行程开关导向头,张紧轮系,驱动轮系,前驱动体,后驱动体,锂电池仓,还有球铰链关节构成。行程开关导向头由类圆锥体导向头和行程开关组成,张紧轮系位于前驱动体和行程开关导向头之间,用来提供张紧力使机器人依附于管道内表面,驱动体内装有伺服电机,用来驱动驱动轮系进而驱动机器人运动,机器人中间部分为锂电池仓,为机器人的运动提供动力。锂电池仓与前后部分由球铰链关节连接,使机器人可以灵活运动。该装置结构精巧,运动灵活,具有传动效率高,结构紧凑,定位精确等特点。
一种螺旋式管道机器人.pdf
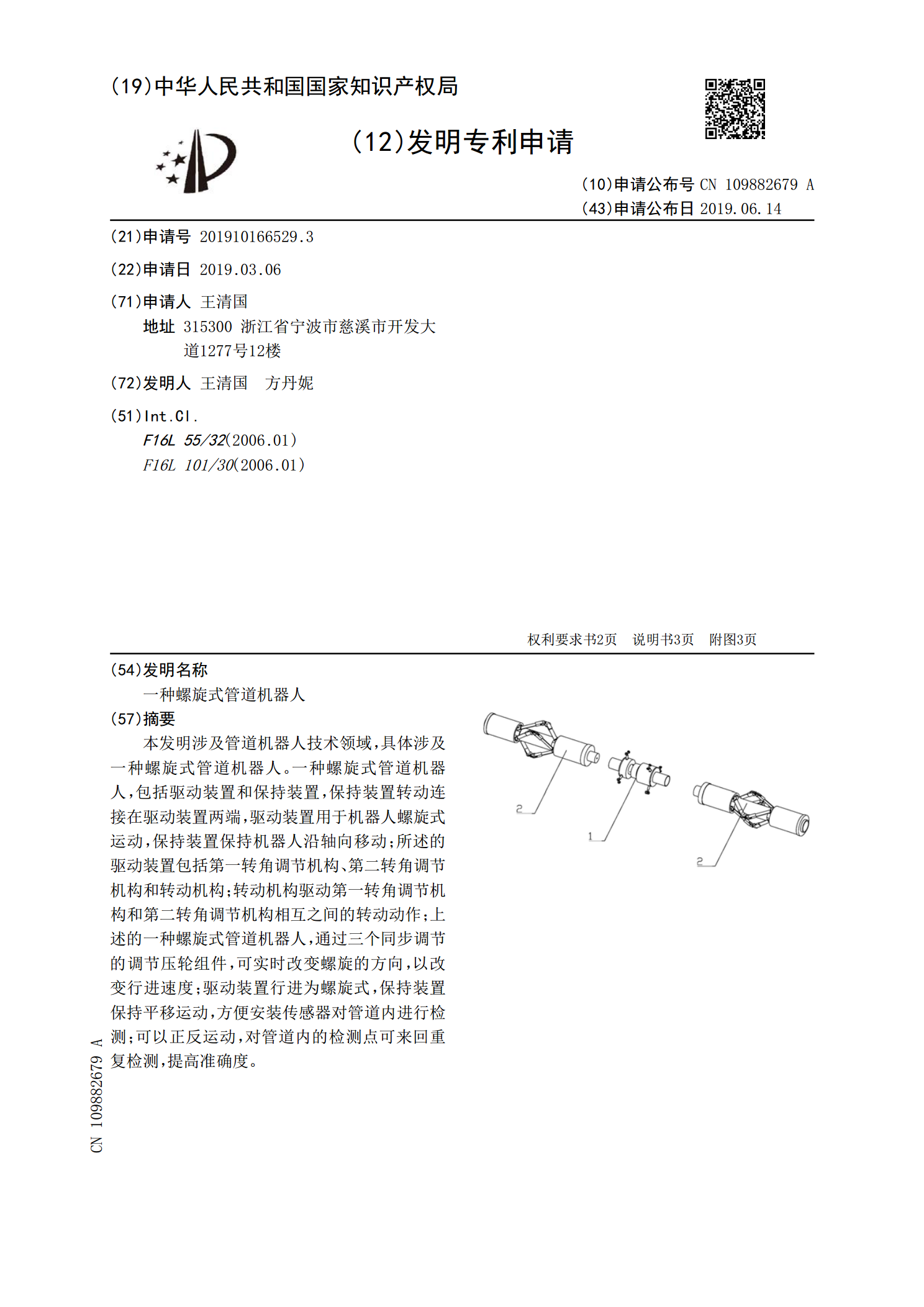
本发明涉及管道机器人技术领域,具体涉及一种螺旋式管道机器人。一种螺旋式管道机器人,包括驱动装置和保持装置,保持装置转动连接在驱动装置两端,驱动装置用于机器人螺旋式运动,保持装置保持机器人沿轴向移动;所述的驱动装置包括第一转角调节机构、第二转角调节机构和转动机构;转动机构驱动第一转角调节机构和第二转角调节机构相互之间的转动动作;上述的一种螺旋式管道机器人,通过三个同步调节的调节压轮组件,可实时改变螺旋的方向,以改变行进速度;驱动装置行进为螺旋式,保持装置保持平移运动,方便安装传感器对管道内进行检测;可以正反
一种螺旋式管道机器人.pdf
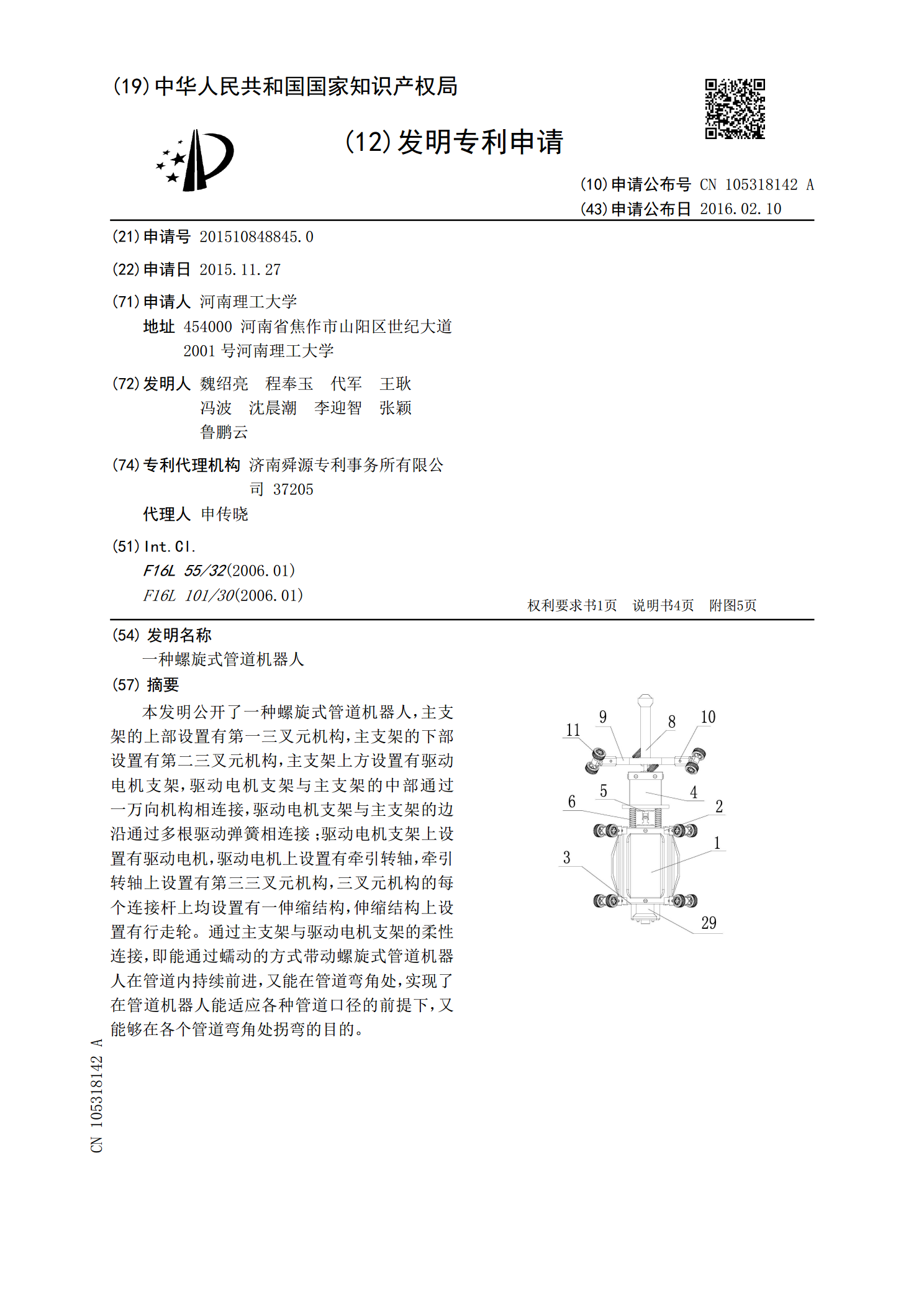
本发明公开了一种螺旋式管道机器人,主支架的上部设置有第一三叉元机构,主支架的下部设置有第二三叉元机构,主支架上方设置有驱动电机支架,驱动电机支架与主支架的中部通过一万向机构相连接,驱动电机支架与主支架的边沿通过多根驱动弹簧相连接;驱动电机支架上设置有驱动电机,驱动电机上设置有牵引转轴,牵引转轴上设置有第三三叉元机构,三叉元机构的每个连接杆上均设置有一伸缩结构,伸缩结构上设置有行走轮。通过主支架与驱动电机支架的柔性连接,即能通过蠕动的方式带动螺旋式管道机器人在管道内持续前进,又能在管道弯角处,实现了在管道机
一种螺旋驱动式管道机器人.pdf
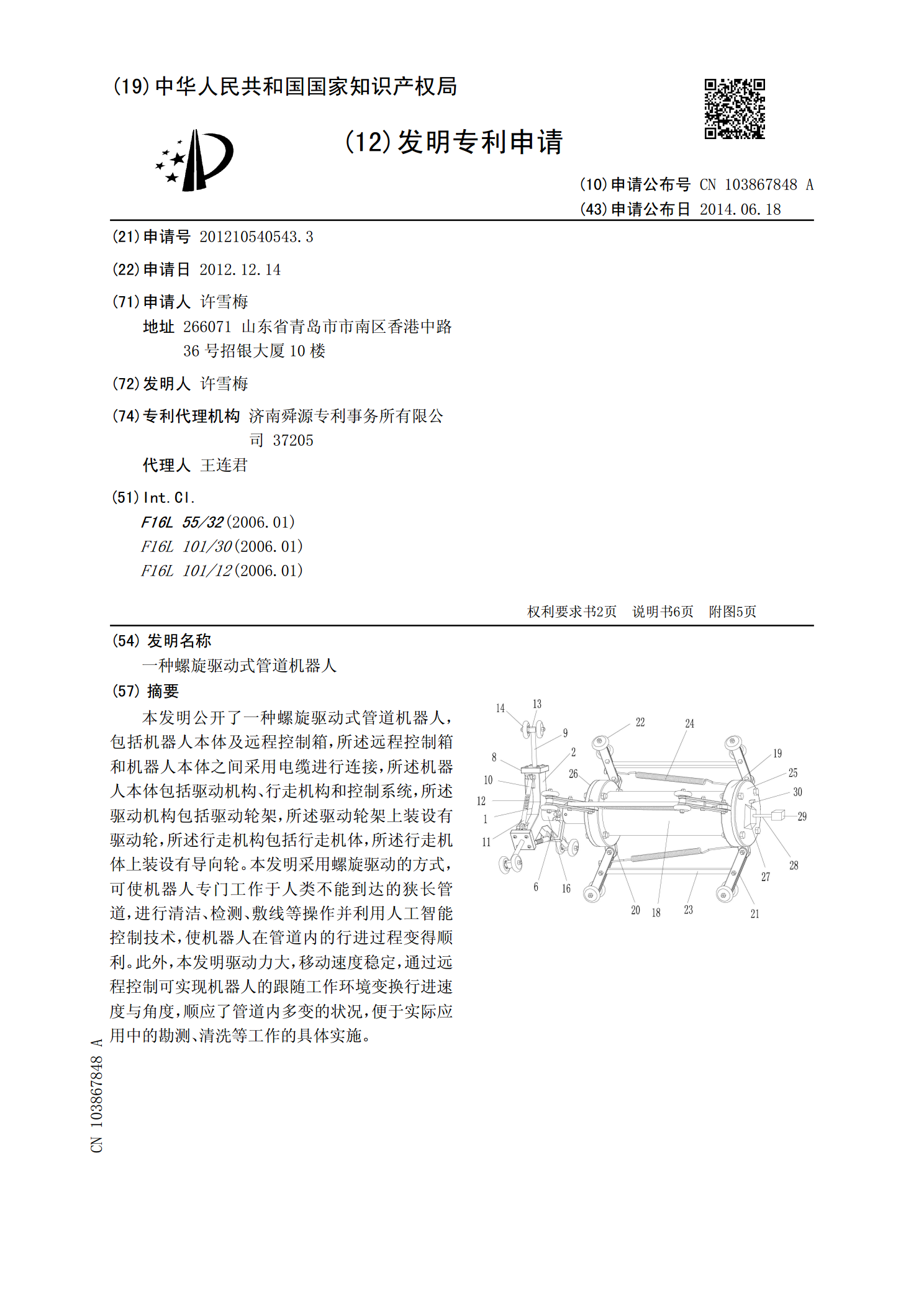
本发明公开了一种螺旋驱动式管道机器人,包括机器人本体及远程控制箱,所述远程控制箱和机器人本体之间采用电缆进行连接,所述机器人本体包括驱动机构、行走机构和控制系统,所述驱动机构包括驱动轮架,所述驱动轮架上装设有驱动轮,所述行走机构包括行走机体,所述行走机体上装设有导向轮。本发明采用螺旋驱动的方式,可使机器人专门工作于人类不能到达的狭长管道,进行清洁、检测、敷线等操作并利用人工智能控制技术,使机器人在管道内的行进过程变得顺利。此外,本发明驱动力大,移动速度稳定,通过远程控制可实现机器人的跟随工作环境变换行进速

一种管道检查机器人的螺旋推进装置.pdf
本发明涉及一种管道检查机器人的螺旋推进装置,包括若干个螺旋推进舱、驱动机构和转向机构,螺旋推进舱外侧设有螺旋齿,螺旋推进舱之间通过转向舱连接;转向舱的侧壁为橡胶伸缩圈;转向机构包括沿螺旋推进装置轴向方向设置的若干方向控制杆和固定于螺旋推进舱内壁上的支架,方向控制杆的两端与支架活动连接;方向控制杆的中间连接有转向电机和由该转向电机控制伸缩的伸缩器;驱动机构包括设于转向舱内部的主动力电机、与主动力电机传动轴连接的主转轴和与主转轴连接的动力转轮,动力转轮设于螺旋推进舱的内部,并带动螺旋齿转动;主转轴上设有动力杆