
一种螺旋式管道机器人.pdf

St****12

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种螺旋式管道机器人.pdf
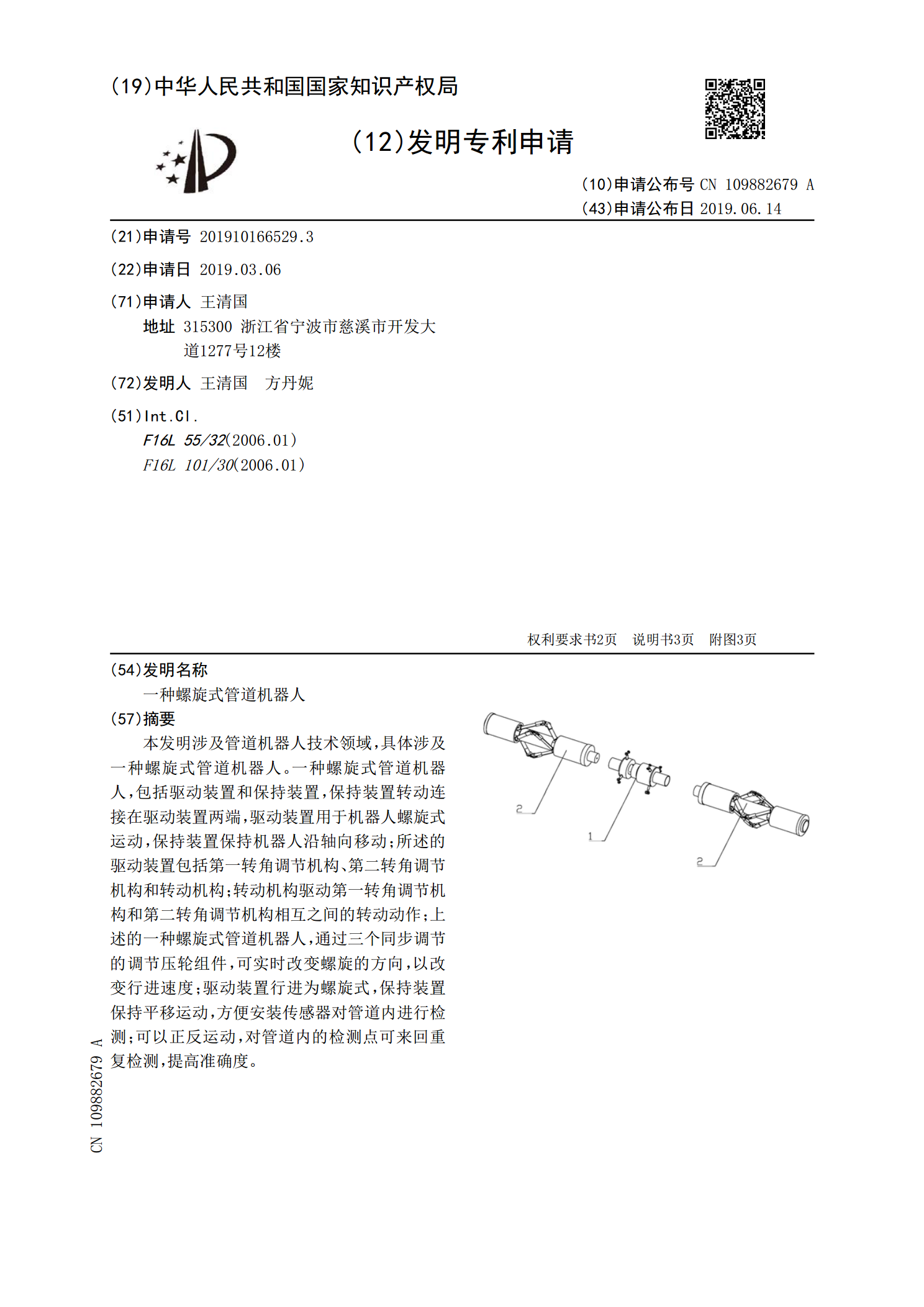
本发明涉及管道机器人技术领域,具体涉及一种螺旋式管道机器人。一种螺旋式管道机器人,包括驱动装置和保持装置,保持装置转动连接在驱动装置两端,驱动装置用于机器人螺旋式运动,保持装置保持机器人沿轴向移动;所述的驱动装置包括第一转角调节机构、第二转角调节机构和转动机构;转动机构驱动第一转角调节机构和第二转角调节机构相互之间的转动动作;上述的一种螺旋式管道机器人,通过三个同步调节的调节压轮组件,可实时改变螺旋的方向,以改变行进速度;驱动装置行进为螺旋式,保持装置保持平移运动,方便安装传感器对管道内进行检测;可以正反
一种螺旋式管道机器人.pdf
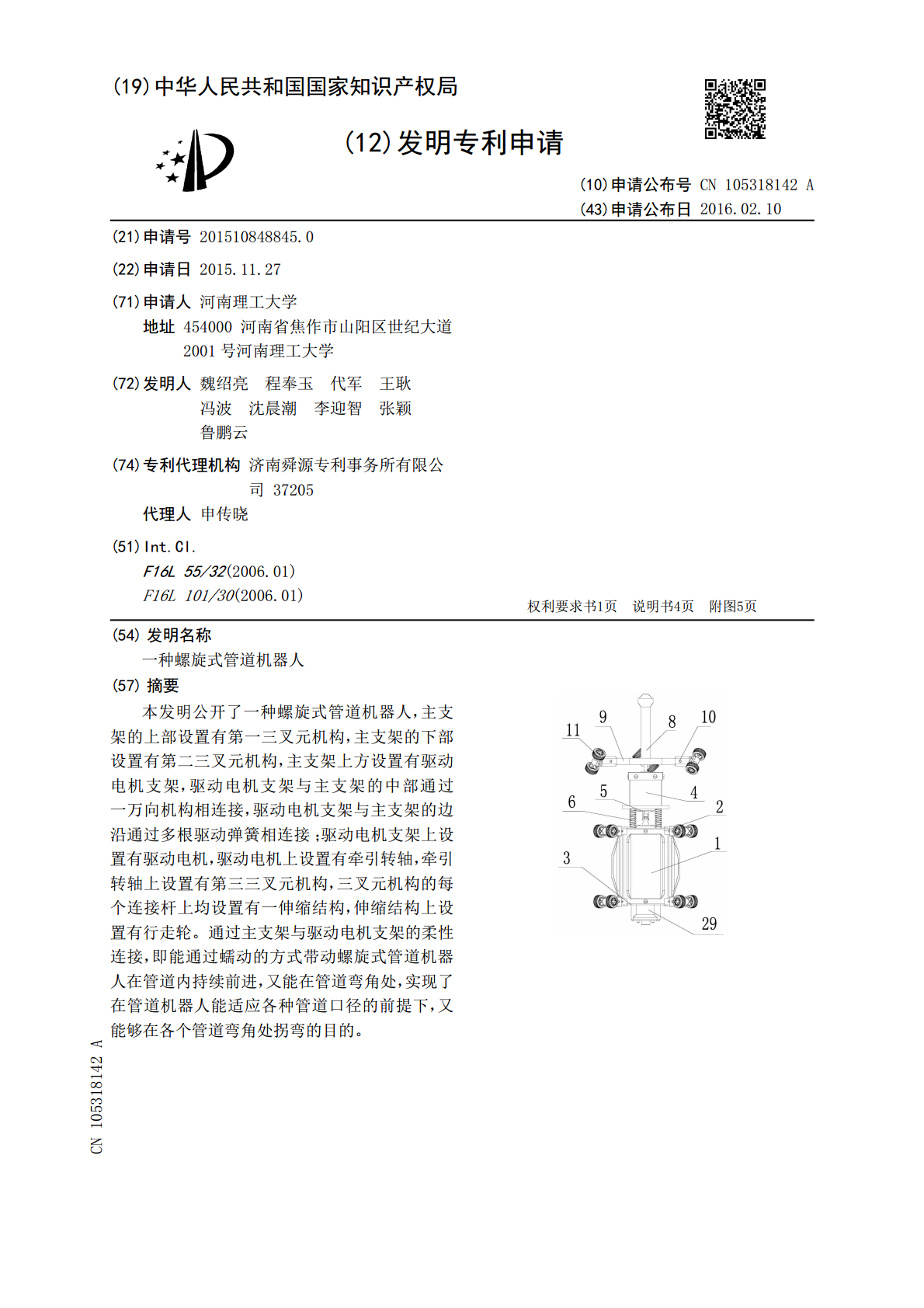
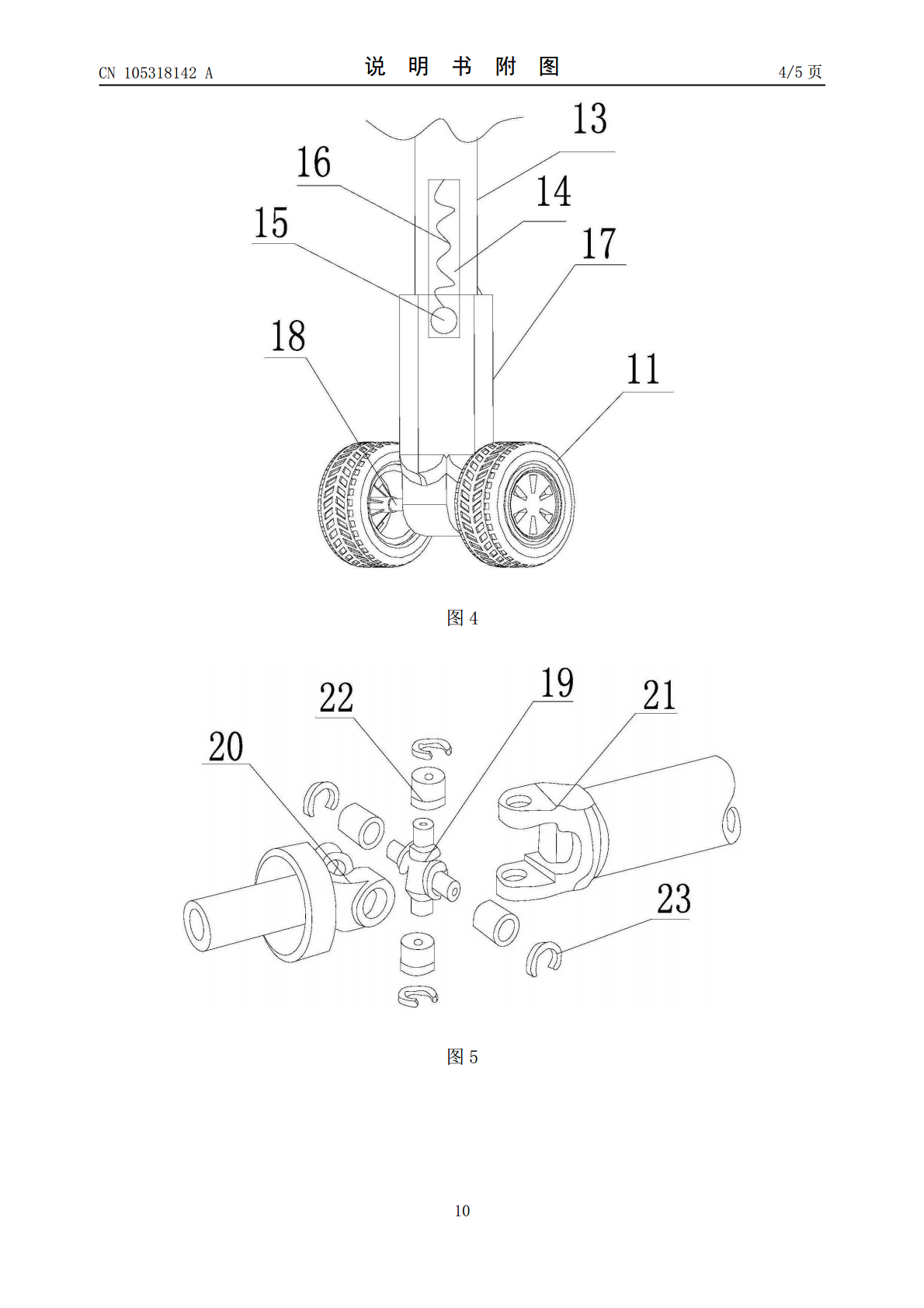
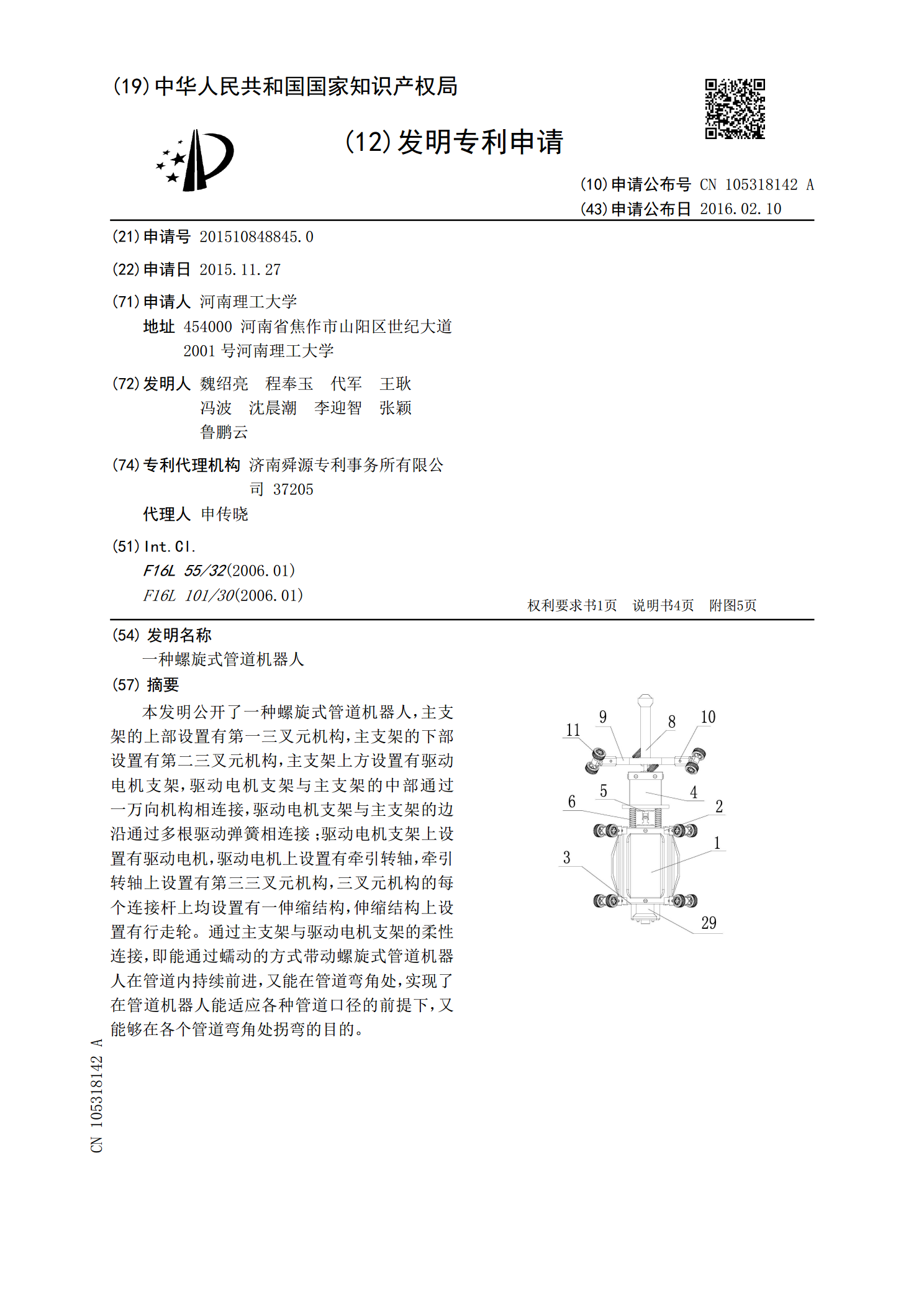
本发明公开了一种螺旋式管道机器人,主支架的上部设置有第一三叉元机构,主支架的下部设置有第二三叉元机构,主支架上方设置有驱动电机支架,驱动电机支架与主支架的中部通过一万向机构相连接,驱动电机支架与主支架的边沿通过多根驱动弹簧相连接;驱动电机支架上设置有驱动电机,驱动电机上设置有牵引转轴,牵引转轴上设置有第三三叉元机构,三叉元机构的每个连接杆上均设置有一伸缩结构,伸缩结构上设置有行走轮。通过主支架与驱动电机支架的柔性连接,即能通过蠕动的方式带动螺旋式管道机器人在管道内持续前进,又能在管道弯角处,实现了在管道机
一种螺旋式管道爬行机器人.pdf
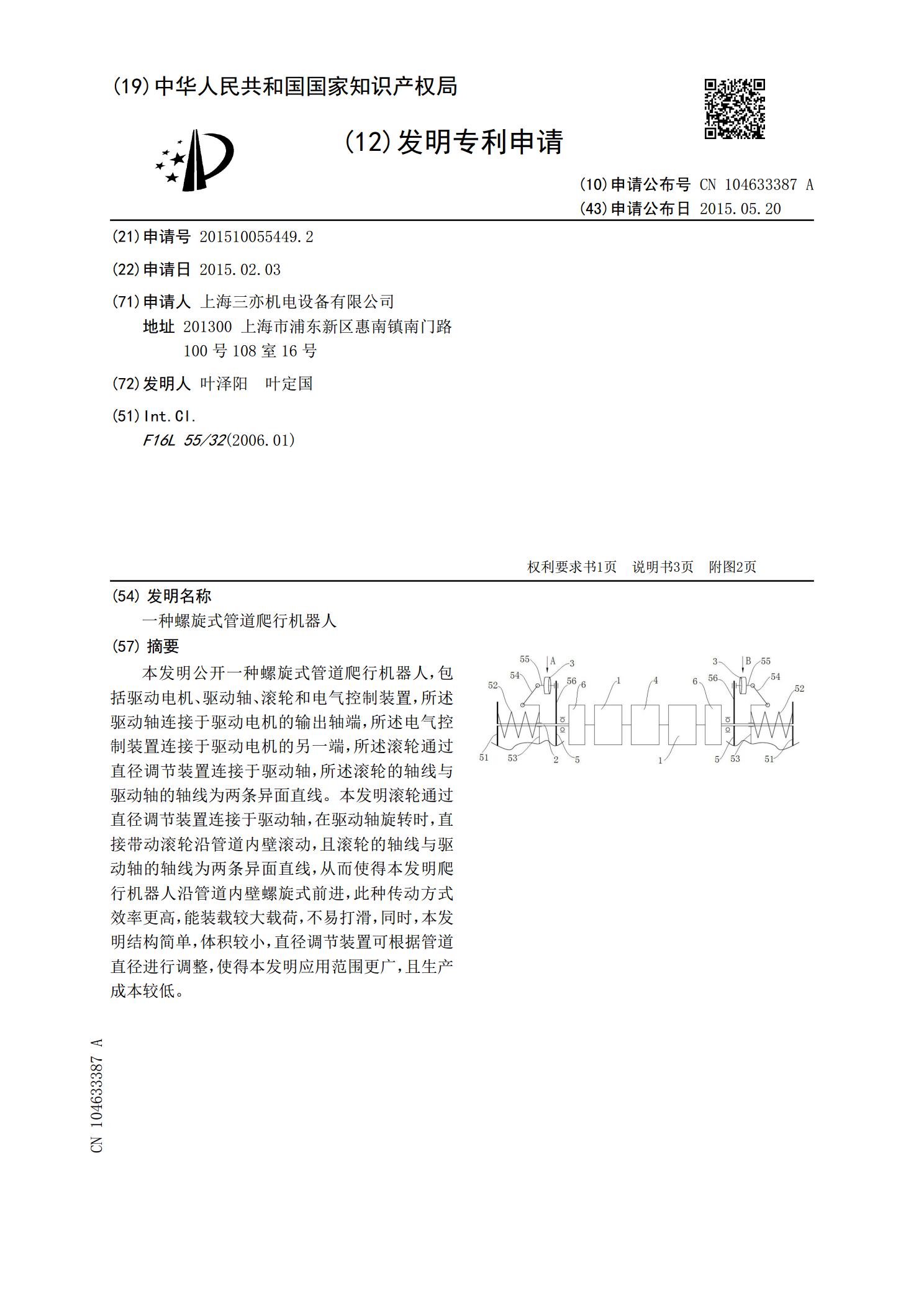
本发明公开一种螺旋式管道爬行机器人,包括驱动电机、驱动轴、滚轮和电气控制装置,所述驱动轴连接于驱动电机的输出轴端,所述电气控制装置连接于驱动电机的另一端,所述滚轮通过直径调节装置连接于驱动轴,所述滚轮的轴线与驱动轴的轴线为两条异面直线。本发明滚轮通过直径调节装置连接于驱动轴,在驱动轴旋转时,直接带动滚轮沿管道内壁滚动,且滚轮的轴线与驱动轴的轴线为两条异面直线,从而使得本发明爬行机器人沿管道内壁螺旋式前进,此种传动方式效率更高,能装载较大载荷,不易打滑,同时,本发明结构简单,体积较小,直径调节装置可根据管道
一种螺旋式驱动管道机器人.pdf
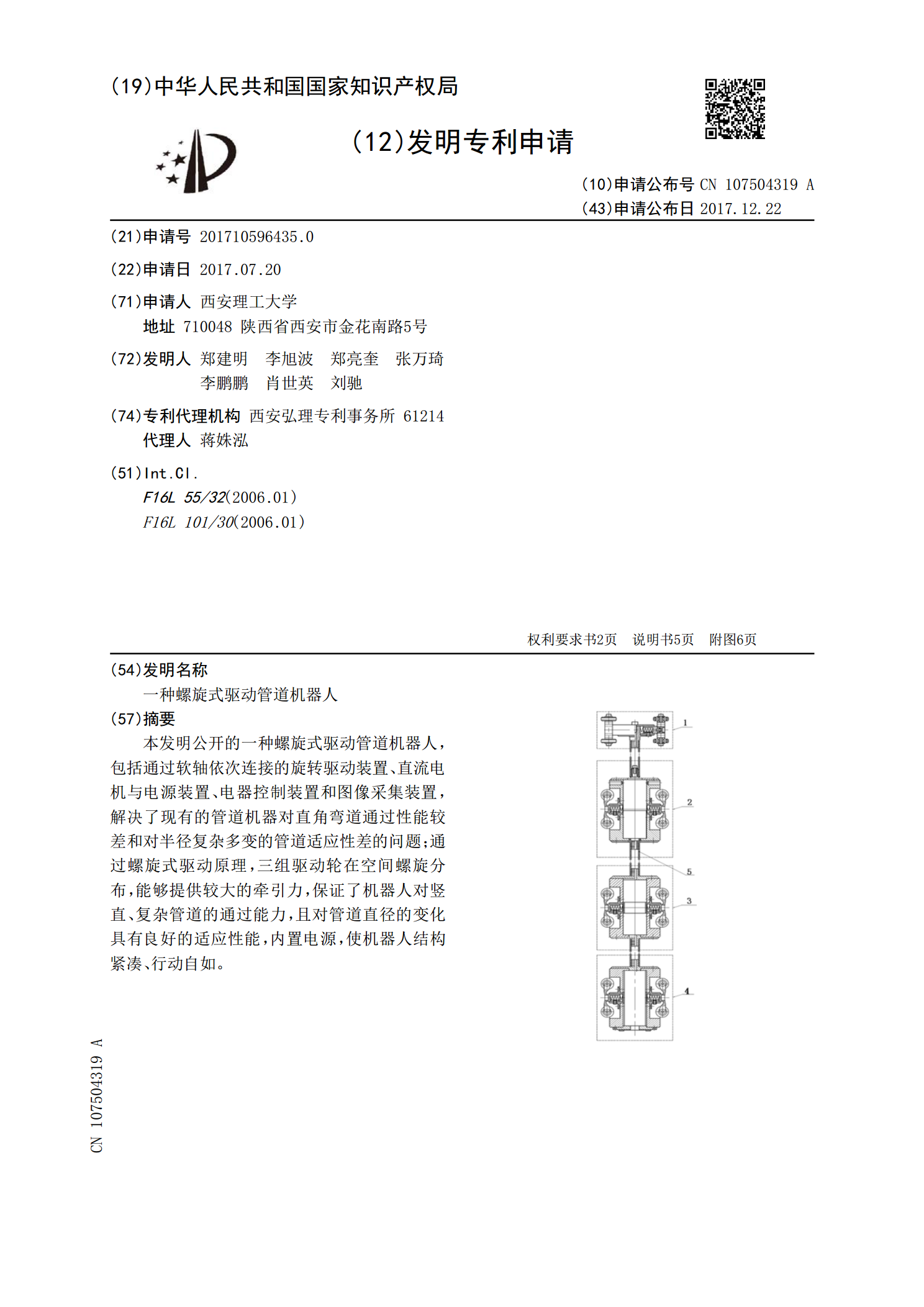
本发明公开的一种螺旋式驱动管道机器人,包括通过软轴依次连接的旋转驱动装置、直流电机与电源装置、电器控制装置和图像采集装置,解决了现有的管道机器对直角弯道通过性能较差和对半径复杂多变的管道适应性差的问题;通过螺旋式驱动原理,三组驱动轮在空间螺旋分布,能够提供较大的牵引力,保证了机器人对竖直、复杂管道的通过能力,且对管道直径的变化具有良好的适应性能,内置电源,使机器人结构紧凑、行动自如。

螺旋式管道机器人.pdf
螺旋式管道机器人,包括对称布置的行走组件,两套行走组件之间设置有控制组件,行走组件与控制组件之间通过伸缩节和万向节连接,所述行走组件由安装架内的电机驱动旋转架,从而驱动旋转架上驱动滚轮机构螺旋前进,行走组件与控制组件上均装有导向滚轮机构;所述滚轮机构通过弹性支撑臂套接在套筒内,在弹性支撑臂内设有多个深度依次递增的外部弹簧通道和内部弹簧通道,外部弹簧通道用于压缩并释放固定在套筒底部的弹簧,内部弹簧通道设有压力可调的密闭空间,通过单向泄压口的设置调节所述密闭空间的压力。本发明能够有效地适应管道内径的变化,并且